 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNextFlow: Unified Sequential Modeling Activates Multimodal Understanding and Generation
Jan 05, 2026We present NextFlow, a unified decoder-only autoregressive transformer trained on 6 trillion interleaved text-image discrete tokens. By leveraging a unified vision representation within a unified autoregressive architecture, NextFlow natively activates multimodal understanding and generation capabilities, unlocking abilities of image editing, interleaved content and video generation. Motivated by the distinct nature of modalities - where text is strictly sequential and images are inherently hierarchical - we retain next-token prediction for text but adopt next-scale prediction for visual generation. This departs from traditional raster-scan methods, enabling the generation of 1024x1024 images in just 5 seconds - orders of magnitude faster than comparable AR models. We address the instabilities of multi-scale generation through a robust training recipe. Furthermore, we introduce a prefix-tuning strategy for reinforcement learning. Experiments demonstrate that NextFlow achieves state-of-the-art performance among unified models and rivals specialized diffusion baselines in visual quality.
InfinityStar: Unified Spacetime AutoRegressive Modeling for Visual Generation
Nov 06, 2025We introduce InfinityStar, a unified spacetime autoregressive framework for high-resolution image and dynamic video synthesis. Building on the recent success of autoregressive modeling in both vision and language, our purely discrete approach jointly captures spatial and temporal dependencies within a single architecture. This unified design naturally supports a variety of generation tasks such as text-to-image, text-to-video, image-to-video, and long interactive video synthesis via straightforward temporal autoregression. Extensive experiments demonstrate that InfinityStar scores 83.74 on VBench, outperforming all autoregressive models by large margins, even surpassing some diffusion competitors like HunyuanVideo. Without extra optimizations, our model generates a 5s, 720p video approximately 10x faster than leading diffusion-based methods. To our knowledge, InfinityStar is the first discrete autoregressive video generator capable of producing industrial level 720p videos. We release all code and models to foster further research in efficient, high-quality video generation.
HLLM-Creator: Hierarchical LLM-based Personalized Creative Generation
Aug 25, 2025AI-generated content technologies are widely used in content creation. However, current AIGC systems rely heavily on creators' inspiration, rarely generating truly user-personalized content. In real-world applications such as online advertising, a single product may have multiple selling points, with different users focusing on different features. This underscores the significant value of personalized, user-centric creative generation. Effective personalized content generation faces two main challenges: (1) accurately modeling user interests and integrating them into the content generation process while adhering to factual constraints, and (2) ensuring high efficiency and scalability to handle the massive user base in industrial scenarios. Additionally, the scarcity of personalized creative data in practice complicates model training, making data construction another key hurdle. We propose HLLM-Creator, a hierarchical LLM framework for efficient user interest modeling and personalized content generation. During inference, a combination of user clustering and a user-ad-matching-prediction based pruning strategy is employed to significantly enhance generation efficiency and reduce computational overhead, making the approach suitable for large-scale deployment. Moreover, we design a data construction pipeline based on chain-of-thought reasoning, which generates high-quality, user-specific creative titles and ensures factual consistency despite limited personalized data. This pipeline serves as a critical foundation for the effectiveness of our model. Extensive experiments on personalized title generation for Douyin Search Ads show the effectiveness of HLLM-Creator. Online A/B test shows a 0.476% increase on Adss, paving the way for more effective and efficient personalized generation in industrial scenarios. Codes for academic dataset are available at https://github.com/bytedance/HLLM.
DetailFlow: 1D Coarse-to-Fine Autoregressive Image Generation via Next-Detail Prediction
May 27, 2025This paper presents DetailFlow, a coarse-to-fine 1D autoregressive (AR) image generation method that models images through a novel next-detail prediction strategy. By learning a resolution-aware token sequence supervised with progressively degraded images, DetailFlow enables the generation process to start from the global structure and incrementally refine details. This coarse-to-fine 1D token sequence aligns well with the autoregressive inference mechanism, providing a more natural and efficient way for the AR model to generate complex visual content. Our compact 1D AR model achieves high-quality image synthesis with significantly fewer tokens than previous approaches, i.e. VAR/VQGAN. We further propose a parallel inference mechanism with self-correction that accelerates generation speed by approximately 8x while reducing accumulation sampling error inherent in teacher-forcing supervision. On the ImageNet 256x256 benchmark, our method achieves 2.96 gFID with 128 tokens, outperforming VAR (3.3 FID) and FlexVAR (3.05 FID), which both require 680 tokens in their AR models. Moreover, due to the significantly reduced token count and parallel inference mechanism, our method runs nearly 2x faster inference speed compared to VAR and FlexVAR. Extensive experimental results demonstrate DetailFlow's superior generation quality and efficiency compared to existing state-of-the-art methods.
VC-LLM: Automated Advertisement Video Creation from Raw Footage using Multi-modal LLMs
Apr 08, 2025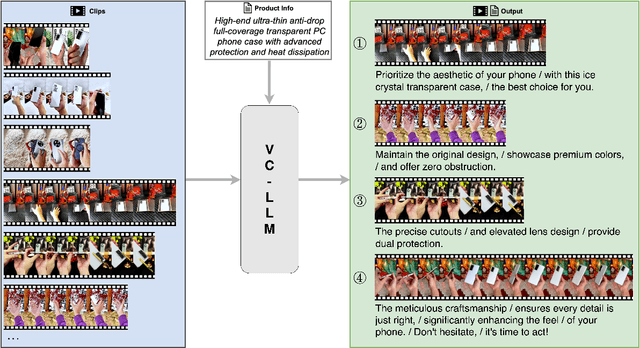
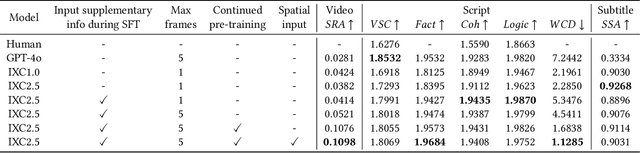
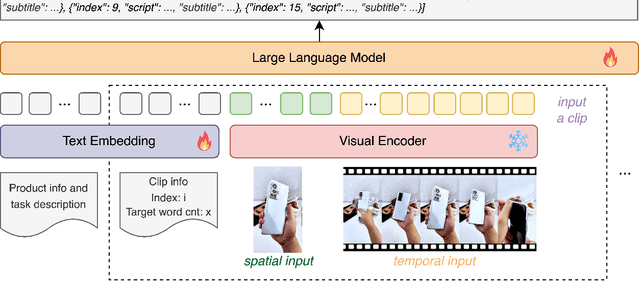

As short videos have risen in popularity, the role of video content in advertising has become increasingly significant. Typically, advertisers record a large amount of raw footage about the product and then create numerous different short-form advertisement videos based on this raw footage. Creating such videos mainly involves editing raw footage and writing advertisement scripts, which requires a certain level of creative ability. It is usually challenging to create many different video contents for the same product, and manual efficiency is often low. In this paper, we present VC-LLM, a framework powered by Large Language Models for the automatic creation of high-quality short-form advertisement videos. Our approach leverages high-resolution spatial input and low-resolution temporal input to represent video clips more effectively, capturing both fine-grained visual details and broader temporal dynamics. In addition, during training, we incorporate supplementary information generated by rewriting the ground truth text, ensuring that all key output information can be directly traced back to the input, thereby reducing model hallucinations. We also designed a benchmark to evaluate the quality of the created videos. Experiments show that VC-LLM based on GPT-4o can produce videos comparable to those created by humans. Furthermore, we collected numerous high-quality short advertisement videos to create a pre-training dataset and manually cleaned a portion of the data to construct a high-quality fine-tuning dataset. Experiments indicate that, on the benchmark, the VC-LLM based on fine-tuned LLM can produce videos with superior narrative logic compared to those created by the VC-LLM based on GPT-4o.
UniTok: A Unified Tokenizer for Visual Generation and Understanding
Feb 27, 2025



The representation disparity between visual generation and understanding imposes a critical gap in integrating these capabilities into a single framework. To bridge this gap, we introduce UniTok, a discrete visual tokenizer that encodes fine-grained details for generation while also capturing high-level semantics for understanding. Despite recent studies have shown that these objectives could induce loss conflicts in training, we reveal that the underlying bottleneck stems from limited representational capacity of discrete tokens. We address this by introducing multi-codebook quantization, which divides vector quantization with several independent sub-codebooks to expand the latent feature space, while avoiding training instability caused by overlarge codebooks. Our method significantly raises the upper limit of unified discrete tokenizers to match or even surpass domain-specific continuous tokenizers. For instance, UniTok achieves a remarkable rFID of 0.38 (versus 0.87 for SD-VAE) and a zero-shot accuracy of 78.6% (versus 76.2% for CLIP) on ImageNet. Our code is available at https://github.com/FoundationVision/UniTok.
HumanDiT: Pose-Guided Diffusion Transformer for Long-form Human Motion Video Generation
Feb 10, 2025



Human motion video generation has advanced significantly, while existing methods still struggle with accurately rendering detailed body parts like hands and faces, especially in long sequences and intricate motions. Current approaches also rely on fixed resolution and struggle to maintain visual consistency. To address these limitations, we propose HumanDiT, a pose-guided Diffusion Transformer (DiT)-based framework trained on a large and wild dataset containing 14,000 hours of high-quality video to produce high-fidelity videos with fine-grained body rendering. Specifically, (i) HumanDiT, built on DiT, supports numerous video resolutions and variable sequence lengths, facilitating learning for long-sequence video generation; (ii) we introduce a prefix-latent reference strategy to maintain personalized characteristics across extended sequences. Furthermore, during inference, HumanDiT leverages Keypoint-DiT to generate subsequent pose sequences, facilitating video continuation from static images or existing videos. It also utilizes a Pose Adapter to enable pose transfer with given sequences. Extensive experiments demonstrate its superior performance in generating long-form, pose-accurate videos across diverse scenarios.
Goku: Flow Based Video Generative Foundation Models
Feb 10, 2025



This paper introduces Goku, a state-of-the-art family of joint image-and-video generation models leveraging rectified flow Transformers to achieve industry-leading performance. We detail the foundational elements enabling high-quality visual generation, including the data curation pipeline, model architecture design, flow formulation, and advanced infrastructure for efficient and robust large-scale training. The Goku models demonstrate superior performance in both qualitative and quantitative evaluations, setting new benchmarks across major tasks. Specifically, Goku achieves 0.76 on GenEval and 83.65 on DPG-Bench for text-to-image generation, and 84.85 on VBench for text-to-video tasks. We believe that this work provides valuable insights and practical advancements for the research community in developing joint image-and-video generation models.
FlashVideo:Flowing Fidelity to Detail for Efficient High-Resolution Video Generation
Feb 07, 2025DiT diffusion models have achieved great success in text-to-video generation, leveraging their scalability in model capacity and data scale. High content and motion fidelity aligned with text prompts, however, often require large model parameters and a substantial number of function evaluations (NFEs). Realistic and visually appealing details are typically reflected in high resolution outputs, further amplifying computational demands especially for single stage DiT models. To address these challenges, we propose a novel two stage framework, FlashVideo, which strategically allocates model capacity and NFEs across stages to balance generation fidelity and quality. In the first stage, prompt fidelity is prioritized through a low resolution generation process utilizing large parameters and sufficient NFEs to enhance computational efficiency. The second stage establishes flow matching between low and high resolutions, effectively generating fine details with minimal NFEs. Quantitative and visual results demonstrate that FlashVideo achieves state-of-the-art high resolution video generation with superior computational efficiency. Additionally, the two-stage design enables users to preview the initial output before committing to full resolution generation, thereby significantly reducing computational costs and wait times as well as enhancing commercial viability .
Infinity: Scaling Bitwise AutoRegressive Modeling for High-Resolution Image Synthesis
Dec 05, 2024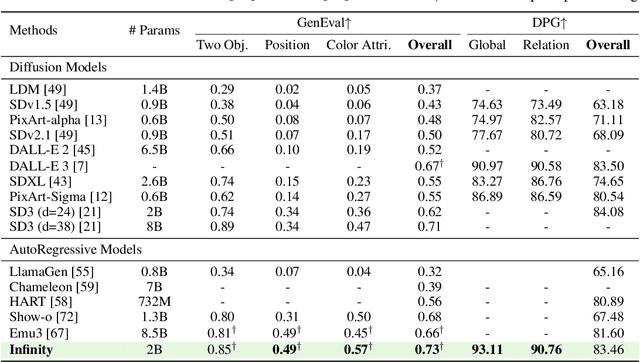

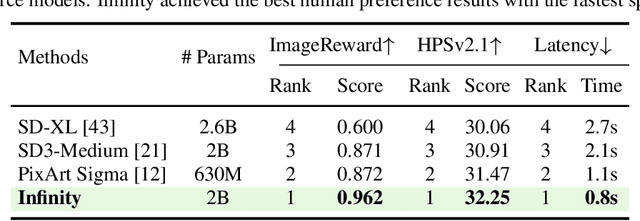

We present Infinity, a Bitwise Visual AutoRegressive Modeling capable of generating high-resolution, photorealistic images following language instruction. Infinity redefines visual autoregressive model under a bitwise token prediction framework with an infinite-vocabulary tokenizer & classifier and bitwise self-correction mechanism, remarkably improving the generation capacity and details. By theoretically scaling the tokenizer vocabulary size to infinity and concurrently scaling the transformer size, our method significantly unleashes powerful scaling capabilities compared to vanilla VAR. Infinity sets a new record for autoregressive text-to-image models, outperforming top-tier diffusion models like SD3-Medium and SDXL. Notably, Infinity surpasses SD3-Medium by improving the GenEval benchmark score from 0.62 to 0.73 and the ImageReward benchmark score from 0.87 to 0.96, achieving a win rate of 66%. Without extra optimization, Infinity generates a high-quality 1024x1024 image in 0.8 seconds, making it 2.6x faster than SD3-Medium and establishing it as the fastest text-to-image model. Models and codes will be released to promote further exploration of Infinity for visual generation and unified tokenizer modeling.