 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOmniVideo-R1: Reinforcing Audio-visual Reasoning with Query Intention and Modality Attention
Feb 05, 2026While humans perceive the world through diverse modalities that operate synergistically to support a holistic understanding of their surroundings, existing omnivideo models still face substantial challenges on audio-visual understanding tasks. In this paper, we propose OmniVideo-R1, a novel reinforced framework that improves mixed-modality reasoning. OmniVideo-R1 empowers models to "think with omnimodal cues" by two key strategies: (1) query-intensive grounding based on self-supervised learning paradigms; and (2) modality-attentive fusion built upon contrastive learning paradigms. Extensive experiments on multiple benchmarks demonstrate that OmniVideo-R1 consistently outperforms strong baselines, highlighting its effectiveness and robust generalization capabilities.
Multimodal Generative Recommendation for Fusing Semantic and Collaborative Signals
Feb 03, 2026Sequential recommender systems rank relevant items by modeling a user's interaction history and computing the inner product between the resulting user representation and stored item embeddings. To avoid the significant memory overhead of storing large item sets, the generative recommendation paradigm instead models each item as a series of discrete semantic codes. Here, the next item is predicted by an autoregressive model that generates the code sequence corresponding to the predicted item. However, despite promising ranking capabilities on small datasets, these methods have yet to surpass traditional sequential recommenders on large item sets, limiting their adoption in the very scenarios they were designed to address. To resolve this, we propose MSCGRec, a Multimodal Semantic and Collaborative Generative Recommender. MSCGRec incorporates multiple semantic modalities and introduces a novel self-supervised quantization learning approach for images based on the DINO framework. Additionally, MSCGRec fuses collaborative and semantic signals by extracting collaborative features from sequential recommenders and treating them as a separate modality. Finally, we propose constrained sequence learning that restricts the large output space during training to the set of permissible tokens. We empirically demonstrate on three large real-world datasets that MSCGRec outperforms both sequential and generative recommendation baselines and provide an extensive ablation study to validate the impact of each component.
MonoScale: Scaling Multi-Agent System with Monotonic Improvement
Jan 30, 2026In recent years, LLM-based multi-agent systems (MAS) have advanced rapidly, using a router to decompose tasks and delegate subtasks to specialized agents. A natural way to expand capability is to scale up the agent pool by continually integrating new functional agents or tool interfaces, but naive expansion can trigger performance collapse when the router cold-starts on newly added, heterogeneous, and unreliable agents. We propose MonoScale, an expansion-aware update framework that proactively generates a small set of agent-conditioned familiarization tasks, harvests evidence from both successful and failed interactions, and distills it into auditable natural-language memory to guide future routing. We formalize sequential augmentation as a contextual bandit and perform trust-region memory updates, yielding a monotonic non-decreasing performance guarantee across onboarding rounds. Experiments on GAIA and Humanity's Last Exam show stable gains as the agent pool grows, outperforming naive scale-up and strong-router fixed-pool baselines.
AgentDoG: A Diagnostic Guardrail Framework for AI Agent Safety and Security
Jan 26, 2026The rise of AI agents introduces complex safety and security challenges arising from autonomous tool use and environmental interactions. Current guardrail models lack agentic risk awareness and transparency in risk diagnosis. To introduce an agentic guardrail that covers complex and numerous risky behaviors, we first propose a unified three-dimensional taxonomy that orthogonally categorizes agentic risks by their source (where), failure mode (how), and consequence (what). Guided by this structured and hierarchical taxonomy, we introduce a new fine-grained agentic safety benchmark (ATBench) and a Diagnostic Guardrail framework for agent safety and security (AgentDoG). AgentDoG provides fine-grained and contextual monitoring across agent trajectories. More Crucially, AgentDoG can diagnose the root causes of unsafe actions and seemingly safe but unreasonable actions, offering provenance and transparency beyond binary labels to facilitate effective agent alignment. AgentDoG variants are available in three sizes (4B, 7B, and 8B parameters) across Qwen and Llama model families. Extensive experimental results demonstrate that AgentDoG achieves state-of-the-art performance in agentic safety moderation in diverse and complex interactive scenarios. All models and datasets are openly released.
The Why Behind the Action: Unveiling Internal Drivers via Agentic Attribution
Jan 21, 2026Large Language Model (LLM)-based agents are widely used in real-world applications such as customer service, web navigation, and software engineering. As these systems become more autonomous and are deployed at scale, understanding why an agent takes a particular action becomes increasingly important for accountability and governance. However, existing research predominantly focuses on \textit{failure attribution} to localize explicit errors in unsuccessful trajectories, which is insufficient for explaining the reasoning behind agent behaviors. To bridge this gap, we propose a novel framework for \textbf{general agentic attribution}, designed to identify the internal factors driving agent actions regardless of the task outcome. Our framework operates hierarchically to manage the complexity of agent interactions. Specifically, at the \textit{component level}, we employ temporal likelihood dynamics to identify critical interaction steps; then at the \textit{sentence level}, we refine this localization using perturbation-based analysis to isolate the specific textual evidence. We validate our framework across a diverse suite of agentic scenarios, including standard tool use and subtle reliability risks like memory-induced bias. Experimental results demonstrate that the proposed framework reliably pinpoints pivotal historical events and sentences behind the agent behavior, offering a critical step toward safer and more accountable agentic systems.
Extreme Value Policy Optimization for Safe Reinforcement Learning
Jan 17, 2026Ensuring safety is a critical challenge in applying Reinforcement Learning (RL) to real-world scenarios. Constrained Reinforcement Learning (CRL) addresses this by maximizing returns under predefined constraints, typically formulated as the expected cumulative cost. However, expectation-based constraints overlook rare but high-impact extreme value events in the tail distribution, such as black swan incidents, which can lead to severe constraint violations. To address this issue, we propose the Extreme Value policy Optimization (EVO) algorithm, leveraging Extreme Value Theory (EVT) to model and exploit extreme reward and cost samples, reducing constraint violations. EVO introduces an extreme quantile optimization objective to explicitly capture extreme samples in the cost tail distribution. Additionally, we propose an extreme prioritization mechanism during replay, amplifying the learning signal from rare but high-impact extreme samples. Theoretically, we establish upper bounds on expected constraint violations during policy updates, guaranteeing strict constraint satisfaction at a zero-violation quantile level. Further, we demonstrate that EVO achieves a lower probability of constraint violations than expectation-based methods and exhibits lower variance than quantile regression methods. Extensive experiments show that EVO significantly reduces constraint violations during training while maintaining competitive policy performance compared to baselines.
TAGRPO: Boosting GRPO on Image-to-Video Generation with Direct Trajectory Alignment
Jan 09, 2026Recent studies have demonstrated the efficacy of integrating Group Relative Policy Optimization (GRPO) into flow matching models, particularly for text-to-image and text-to-video generation. However, we find that directly applying these techniques to image-to-video (I2V) models often fails to yield consistent reward improvements. To address this limitation, we present TAGRPO, a robust post-training framework for I2V models inspired by contrastive learning. Our approach is grounded in the observation that rollout videos generated from identical initial noise provide superior guidance for optimization. Leveraging this insight, we propose a novel GRPO loss applied to intermediate latents, encouraging direct alignment with high-reward trajectories while maximizing distance from low-reward counterparts. Furthermore, we introduce a memory bank for rollout videos to enhance diversity and reduce computational overhead. Despite its simplicity, TAGRPO achieves significant improvements over DanceGRPO in I2V generation.
Rotate Your Character: Revisiting Video Diffusion Models for High-Quality 3D Character Generation
Jan 09, 2026Generating high-quality 3D characters from single images remains a significant challenge in digital content creation, particularly due to complex body poses and self-occlusion. In this paper, we present RCM (Rotate your Character Model), an advanced image-to-video diffusion framework tailored for high-quality novel view synthesis (NVS) and 3D character generation. Compared to existing diffusion-based approaches, RCM offers several key advantages: (1) transferring characters with any complex poses into a canonical pose, enabling consistent novel view synthesis across the entire viewing orbit, (2) high-resolution orbital video generation at 1024x1024 resolution, (3) controllable observation positions given different initial camera poses, and (4) multi-view conditioning supporting up to 4 input images, accommodating diverse user scenarios. Extensive experiments demonstrate that RCM outperforms state-of-the-art methods in both novel view synthesis and 3D generation quality.
MARS2 2025 Challenge on Multimodal Reasoning: Datasets, Methods, Results, Discussion, and Outlook
Sep 17, 2025
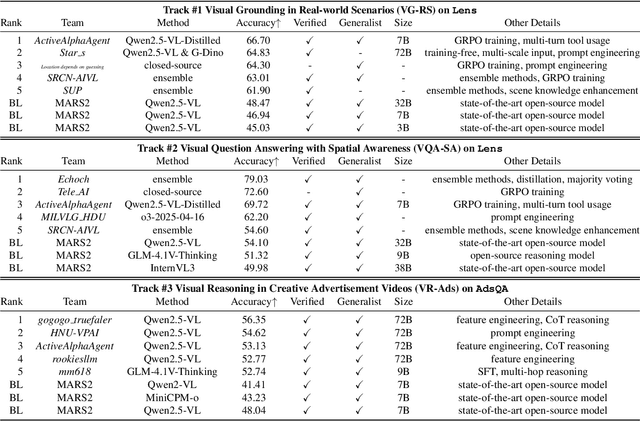

This paper reviews the MARS2 2025 Challenge on Multimodal Reasoning. We aim to bring together different approaches in multimodal machine learning and LLMs via a large benchmark. We hope it better allows researchers to follow the state-of-the-art in this very dynamic area. Meanwhile, a growing number of testbeds have boosted the evolution of general-purpose large language models. Thus, this year's MARS2 focuses on real-world and specialized scenarios to broaden the multimodal reasoning applications of MLLMs. Our organizing team released two tailored datasets Lens and AdsQA as test sets, which support general reasoning in 12 daily scenarios and domain-specific reasoning in advertisement videos, respectively. We evaluated 40+ baselines that include both generalist MLLMs and task-specific models, and opened up three competition tracks, i.e., Visual Grounding in Real-world Scenarios (VG-RS), Visual Question Answering with Spatial Awareness (VQA-SA), and Visual Reasoning in Creative Advertisement Videos (VR-Ads). Finally, 76 teams from the renowned academic and industrial institutions have registered and 40+ valid submissions (out of 1200+) have been included in our ranking lists. Our datasets, code sets (40+ baselines and 15+ participants' methods), and rankings are publicly available on the MARS2 workshop website and our GitHub organization page https://github.com/mars2workshop/, where our updates and announcements of upcoming events will be continuously provided.
Style4D-Bench: A Benchmark Suite for 4D Stylization
Aug 26, 2025We introduce Style4D-Bench, the first benchmark suite specifically designed for 4D stylization, with the goal of standardizing evaluation and facilitating progress in this emerging area. Style4D-Bench comprises: 1) a comprehensive evaluation protocol measuring spatial fidelity, temporal coherence, and multi-view consistency through both perceptual and quantitative metrics, 2) a strong baseline that make an initial attempt for 4D stylization, and 3) a curated collection of high-resolution dynamic 4D scenes with diverse motions and complex backgrounds. To establish a strong baseline, we present Style4D, a novel framework built upon 4D Gaussian Splatting. It consists of three key components: a basic 4DGS scene representation to capture reliable geometry, a Style Gaussian Representation that leverages lightweight per-Gaussian MLPs for temporally and spatially aware appearance control, and a Holistic Geometry-Preserved Style Transfer module designed to enhance spatio-temporal consistency via contrastive coherence learning and structural content preservation. Extensive experiments on Style4D-Bench demonstrate that Style4D achieves state-of-the-art performance in 4D stylization, producing fine-grained stylistic details with stable temporal dynamics and consistent multi-view rendering. We expect Style4D-Bench to become a valuable resource for benchmarking and advancing research in stylized rendering of dynamic 3D scenes. Project page: https://becky-catherine.github.io/Style4D . Code: https://github.com/Becky-catherine/Style4D-Bench .