 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Baseline to Follow-Up: Counterfactual Spine DXA Image Synthesis in UK Biobank Using a Causal Hierarchical Variational Autoencoder
May 21, 2026Dual-energy X-ray absorptiometry (DXA) is widely used for large-scale skeletal assessment, yet learning controllable and interpretable factor-specific anatomical variation remains challenging. We propose a metadata-conditioned causal hierarchical variational autoencoder (CHVAE) for causally consistent generation of anteroposterior (AP) spine DXA images from the UK Biobank (UKB). The model is trained on 3,743 raw AP spine scans from the first imaging visit and conditioned on basic participant attributes and lumbar morphometry. Causal consistency is evaluated in a baseline-to-follow-up setting using abduction--action--prediction (AAP): latent variables are abducted from baseline images, age is intervened to the repeat-imaging value, and the resulting counterfactual follow-up morphometry is compared with observed repeat-imaging measurements. Results show strong absolute-level agreement for key vertebral morphometry variables under age intervention, supporting intervention-aligned synthesis of anatomically plausible DXA images.
Don't Click That: Teaching Web Agents to Resist Deceptive Interfaces
May 10, 2026Vision-language model (VLM) based web agents demonstrate impressive autonomous GUI interaction but remain vulnerable to deceptive interface elements. Existing approaches either detect deception without task integration or document attacks without proposing defenses. We formalize deception-aware web agent defense and propose DUDE (Deceptive UI Detector & Evaluator), a two-stage framework combining hybrid-reward learning with asymmetric penalties and experience summarization to distill failure patterns into transferable guidance. We introduce RUC (Real UI Clickboxes), a benchmark of 1,407 scenarios spanning four domains and deception categories. Experiments show DUDE reduces deception susceptibility by 53.8% while maintaining task performance, establishing an effective foundation for robust web agent deployment.
Are Independently Estimated View Uncertainties Comparable? Unified Routing for Trusted Multi-View Classification
Apr 10, 2026Trusted multi-view classification typically relies on a view-wise evidential fusion process: each view independently produces class evidence and uncertainty, and the final prediction is obtained by aggregating these independent opinions. While this design is modular and uncertainty-aware, it implicitly assumes that evidence from different views is numerically comparable. In practice, however, this assumption is fragile. Different views often differ in feature space, noise level, and semantic granularity, while independently trained branches are optimized only for prediction correctness, without any constraint enforcing cross-view consistency in evidence strength. As a result, the uncertainty used for fusion can be dominated by branch-specific scale bias rather than true sample-level reliability. To address this issue, we propose Trusted Multi-view learning with Unified Routing (TMUR), which decouples view-specific evidence extraction from fusion arbitration. TMUR uses view-private experts and one collaborative expert, and employs a unified router that observes the global multi-view context to generate sample-level expert weights. Soft load-balancing and diversity regularization further encourage balanced expert utilization and more discriminative expert specialization. We also provide theoretical analysis showing why independent evidential supervision does not identify a common cross-view evidence scale, and why unified global routing is preferable to branch-local arbitration when reliability is sample-dependent.
CodeScout: An Effective Recipe for Reinforcement Learning of Code Search Agents
Mar 18, 2026A prerequisite for coding agents to perform tasks on large repositories is code localization - the identification of relevant files, classes, and functions to work on. While repository-level code localization has been performed using embedding-based retrieval approaches such as vector search, recent work has focused on developing agents to localize relevant code either as a standalone precursor to or interleaved with performing actual work. Most prior methods on agentic code search equip the agent with complex, specialized tools, such as repository graphs derived from static analysis. In this paper, we demonstrate that, with an effective reinforcement learning recipe, a coding agent equipped with nothing more than a standard Unix terminal can be trained to achieve strong results. Our experiments on three benchmarks (SWE-Bench Verified, Pro, and Lite) reveal that our models consistently achieve superior or competitive performance over 2-18x larger base and post-trained LLMs and sometimes approach performance provided by closed models like Claude Sonnet, even when using specialized scaffolds. Our work particularly focuses on techniques for re-purposing existing coding agent environments for code search, reward design, and RL optimization. We release the resulting model family, CodeScout, along with all our code and data for the community to build upon.
Legendre Memory Unit with A Multi-Slice Compensation Model for Short-Term Wind Speed Forecasting Based on Wind Farm Cluster Data
Feb 04, 2026With more wind farms clustered for integration, the short-term wind speed prediction of such wind farm clusters is critical for normal operation of power systems. This paper focuses on achieving accurate, fast, and robust wind speed prediction by full use of cluster data with spatial-temporal correlation. First, weighted mean filtering (WMF) is applied to denoise wind speed data at the single-farm level. The Legendre memory unit (LMU) is then innovatively applied for the wind speed prediction, in combination with the Compensating Parameter based on Kendall rank correlation coefficient (CPK) of wind farm cluster data, to construct the multi-slice LMU (MSLMU). Finally, an innovative ensemble model WMF-CPK-MSLMU is proposed herein, with three key blocks: data pre-processing, forecasting, and multi-slice compensation. Advantages include: 1) LMU jointly models linear and nonlinear dependencies among farms to capture spatial-temporal correlations through backpropagation; 2) MSLMU enhances forecasting by using CPK-derived weights instead of random initialization, allowing spatial correlations to fully activate hidden nodes across clustered wind farms.; 3) CPK adaptively weights the compensation model in MSLMU and complements missing data spatially, to facilitate the whole model highly accurate and robust. Test results on different wind farm clusters indicate the effectiveness and superiority of proposed ensemble model WMF-CPK-MSLMU in the short-term prediction of wind farm clusters compared to the existing models.
The Shadow Self: Intrinsic Value Misalignment in Large Language Model Agents
Jan 24, 2026Large language model (LLM) agents with extended autonomy unlock new capabilities, but also introduce heightened challenges for LLM safety. In particular, an LLM agent may pursue objectives that deviate from human values and ethical norms, a risk known as value misalignment. Existing evaluations primarily focus on responses to explicit harmful input or robustness against system failure, while value misalignment in realistic, fully benign, and agentic settings remains largely underexplored. To fill this gap, we first formalize the Loss-of-Control risk and identify the previously underexamined Intrinsic Value Misalignment (Intrinsic VM). We then introduce IMPRESS (Intrinsic Value Misalignment Probes in REalistic Scenario Set), a scenario-driven framework for systematically assessing this risk. Following our framework, we construct benchmarks composed of realistic, fully benign, and contextualized scenarios, using a multi-stage LLM generation pipeline with rigorous quality control. We evaluate Intrinsic VM on 21 state-of-the-art LLM agents and find that it is a common and broadly observed safety risk across models. Moreover, the misalignment rates vary by motives, risk types, model scales, and architectures. While decoding strategies and hyperparameters exhibit only marginal influence, contextualization and framing mechanisms significantly shape misalignment behaviors. Finally, we conduct human verification to validate our automated judgments and assess existing mitigation strategies, such as safety prompting and guardrails, which show instability or limited effectiveness. We further demonstrate key use cases of IMPRESS across the AI Ecosystem. Our code and benchmark will be publicly released upon acceptance.
Simple Yet Effective Selective Imputation for Incomplete Multi-view Clustering
Dec 11, 2025Incomplete multi-view data, where different views suffer from missing and unbalanced observations, pose significant challenges for clustering. Existing imputation-based methods attempt to estimate missing views to restore data associations, but indiscriminate imputation often introduces noise and bias, especially when the available information is insufficient. Imputation-free methods avoid this risk by relying solely on observed data, but struggle under severe incompleteness due to the lack of cross-view complementarity. To address this issue, we propose Informativeness-based Selective imputation Multi-View Clustering (ISMVC). Our method evaluates the imputation-relevant informativeness of each missing position based on intra-view similarity and cross-view consistency, and selectively imputes only when sufficient support is available. Furthermore, we integrate this selection with a variational autoencoder equipped with a mixture-of-Gaussians prior to learn clustering-friendly latent representations. By performing distribution-level imputation, ISMVC not only stabilizes the aggregation of posterior distributions but also explicitly models imputation uncertainty, enabling robust fusion and preventing overconfident reconstructions. Compared with existing cautious imputation strategies that depend on training dynamics or model feedback, our method is lightweight, data-driven, and model-agnostic. It can be readily integrated into existing IMC models as a plug-in module. Extensive experiments on multiple benchmark datasets under a more realistic and challenging unbalanced missing scenario demonstrate that our method outperforms both imputation-based and imputation-free approaches.
XAttn-BMD: Multimodal Deep Learning with Cross-Attention for Femoral Neck Bone Mineral Density Estimation
Nov 18, 2025Poor bone health is a significant public health concern, and low bone mineral density (BMD) leads to an increased fracture risk, a key feature of osteoporosis. We present XAttn-BMD (Cross-Attention BMD), a multimodal deep learning framework that predicts femoral neck BMD from hip X-ray images and structured clinical metadata. It utilizes a novel bidirectional cross-attention mechanism to dynamically integrate image and metadata features for cross-modal mutual reinforcement. A Weighted Smooth L1 loss is tailored to address BMD imbalance and prioritize clinically significant cases. Extensive experiments on the data from the Hertfordshire Cohort Study show that our model outperforms the baseline models in regression generalization and robustness. Ablation studies confirm the effectiveness of both cross-attention fusion and the customized loss function. Experimental results show that the integration of multimodal data via cross-attention outperforms naive feature concatenation without cross-attention, reducing MSE by 16.7%, MAE by 6.03%, and increasing the R2 score by 16.4%, highlighting the effectiveness of the approach for femoral neck BMD estimation. Furthermore, screening performance was evaluated using binary classification at clinically relevant femoral neck BMD thresholds, demonstrating the model's potential in real-world scenarios.
Gradient Rectification for Robust Calibration under Distribution Shift
Aug 27, 2025Deep neural networks often produce overconfident predictions, undermining their reliability in safety-critical applications. This miscalibration is further exacerbated under distribution shift, where test data deviates from the training distribution due to environmental or acquisition changes. While existing approaches improve calibration through training-time regularization or post-hoc adjustment, their reliance on access to or simulation of target domains limits their practicality in real-world scenarios. In this paper, we propose a novel calibration framework that operates without access to target domain information. From a frequency-domain perspective, we identify that distribution shifts often distort high-frequency visual cues exploited by deep models, and introduce a low-frequency filtering strategy to encourage reliance on domain-invariant features. However, such information loss may degrade In-Distribution (ID) calibration performance. Therefore, we further propose a gradient-based rectification mechanism that enforces ID calibration as a hard constraint during optimization. Experiments on synthetic and real-world shifted datasets, including CIFAR-10/100-C and WILDS, demonstrate that our method significantly improves calibration under distribution shift while maintaining strong in-distribution performance.
NTIRE 2025 Image Shadow Removal Challenge Report
Jun 18, 2025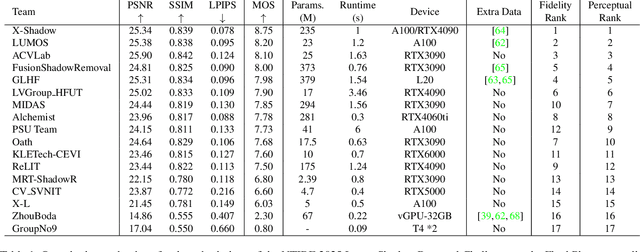

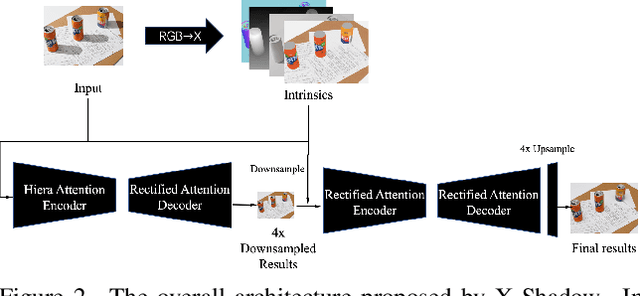
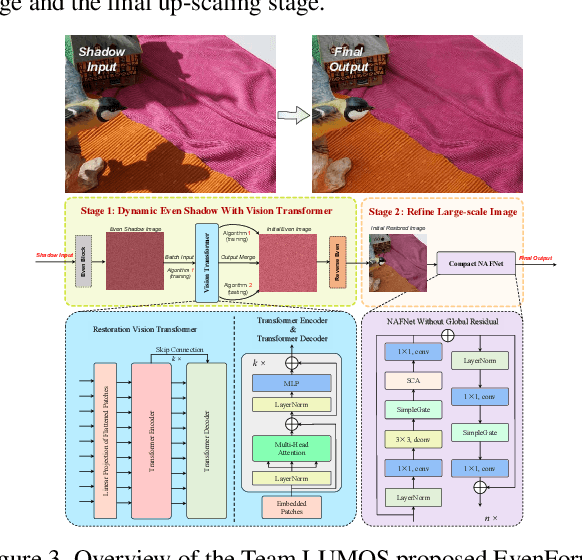
This work examines the findings of the NTIRE 2025 Shadow Removal Challenge. A total of 306 participants have registered, with 17 teams successfully submitting their solutions during the final evaluation phase. Following the last two editions, this challenge had two evaluation tracks: one focusing on reconstruction fidelity and the other on visual perception through a user study. Both tracks were evaluated with images from the WSRD+ dataset, simulating interactions between self- and cast-shadows with a large number of diverse objects, textures, and materials.