 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Llama 4 Herd: Architecture, Training, Evaluation, and Deployment Notes
Jan 15, 2026This document consolidates publicly reported technical details about Metas Llama 4 model family. It summarizes (i) released variants (Scout and Maverick) and the broader herd context including the previewed Behemoth teacher model, (ii) architectural characteristics beyond a high-level MoE description covering routed/shared-expert structure, early-fusion multimodality, and long-context design elements reported for Scout (iRoPE and length generalization strategies), (iii) training disclosures spanning pre-training, mid-training for long-context extension, and post-training methodology (lightweight SFT, online RL, and lightweight DPO) as described in release materials, (iv) developer-reported benchmark results for both base and instruction-tuned checkpoints, and (v) practical deployment constraints observed across major serving environments, including provider-specific context limits and quantization packaging. The manuscript also summarizes licensing obligations relevant to redistribution and derivative naming, and reviews publicly described safeguards and evaluation practices. The goal is to provide a compact technical reference for researchers and practitioners who need precise, source-backed facts about Llama 4.
Poisson Hierarchical Indian Buffet Processes for Within and Across Group Sharing of Latent Features-With Indications for Microbiome Species Sampling Models
Feb 04, 2025In this work, we present a comprehensive Bayesian posterior analysis of what we term Poisson Hierarchical Indian Buffet Processes, designed for complex random sparse count species sampling models that allow for the sharing of information across and within groups. This analysis covers a potentially infinite number of species and unknown parameters, which, within a Bayesian machine learning context, we are able to learn from as more information is sampled. To achieve our refined results, we employ a range of methodologies drawn from Bayesian latent feature models, random occupancy models, and excursion theory. Despite this complexity, our goal is to make our findings accessible to practitioners, including those who may not be familiar with these areas. To facilitate understanding, we adopt a pseudo-expository style that emphasizes clarity and practical utility. We aim to express our findings in a language that resonates with experts in microbiome and ecological studies, addressing gaps in modeling capabilities while acknowledging that we are not experts ourselves in these fields. This approach encourages the use of our models as basic components of more sophisticated frameworks employed by domain experts, embodying the spirit of the seminal work on the Dirichlet Process. Ultimately, our refined posterior analysis not only yields tractable computational procedures but also enables practical statistical implementation and provides a clear mapping to relevant quantities in microbiome analysis.
The Llama 3 Herd of Models
Jul 31, 2024Modern artificial intelligence (AI) systems are powered by foundation models. This paper presents a new set of foundation models, called Llama 3. It is a herd of language models that natively support multilinguality, coding, reasoning, and tool usage. Our largest model is a dense Transformer with 405B parameters and a context window of up to 128K tokens. This paper presents an extensive empirical evaluation of Llama 3. We find that Llama 3 delivers comparable quality to leading language models such as GPT-4 on a plethora of tasks. We publicly release Llama 3, including pre-trained and post-trained versions of the 405B parameter language model and our Llama Guard 3 model for input and output safety. The paper also presents the results of experiments in which we integrate image, video, and speech capabilities into Llama 3 via a compositional approach. We observe this approach performs competitively with the state-of-the-art on image, video, and speech recognition tasks. The resulting models are not yet being broadly released as they are still under development.
PVF (Parameter Vulnerability Factor): A Quantitative Metric Measuring AI Vulnerability and Resilience Against Parameter Corruptions
May 02, 2024



Reliability of AI systems is a fundamental concern for the successful deployment and widespread adoption of AI technologies. Unfortunately, the escalating complexity and heterogeneity of AI hardware systems make them inevitably and increasingly susceptible to hardware faults (e.g., bit flips) that can potentially corrupt model parameters. Given this challenge, this paper aims to answer a critical question: How likely is a parameter corruption to result in an incorrect model output? To systematically answer this question, we propose a novel quantitative metric, Parameter Vulnerability Factor (PVF), inspired by architectural vulnerability factor (AVF) in computer architecture community, aiming to standardize the quantification of AI model resilience/vulnerability against parameter corruptions. We define a model parameter's PVF as the probability that a corruption in that particular model parameter will result in an incorrect output. Similar to AVF, this statistical concept can be derived from statistically extensive and meaningful fault injection (FI) experiments. In this paper, we present several use cases on applying PVF to three types of tasks/models during inference -- recommendation (DLRM), vision classification (CNN), and text classification (BERT). PVF can provide pivotal insights to AI hardware designers in balancing the tradeoff between fault protection and performance/efficiency such as mapping vulnerable AI parameter components to well-protected hardware modules. PVF metric is applicable to any AI model and has a potential to help unify and standardize AI vulnerability/resilience evaluation practice.
PyPose v0.6: The Imperative Programming Interface for Robotics
Sep 22, 2023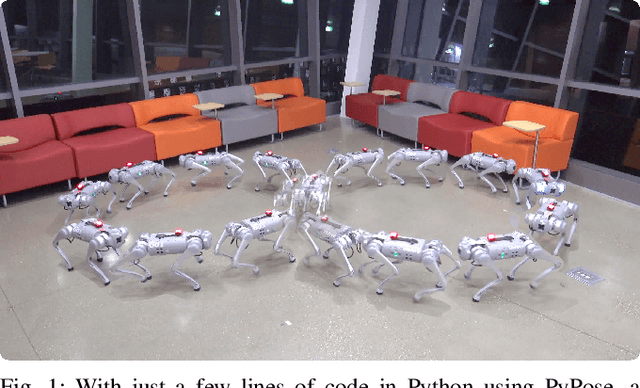
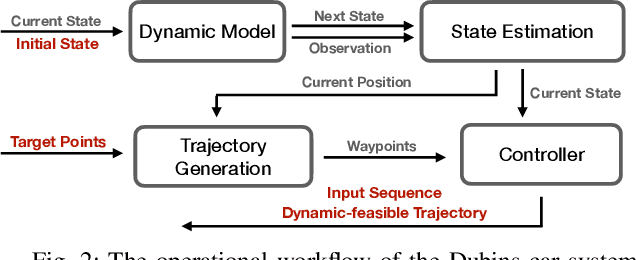
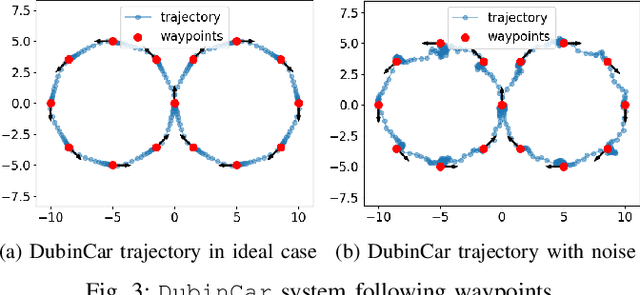
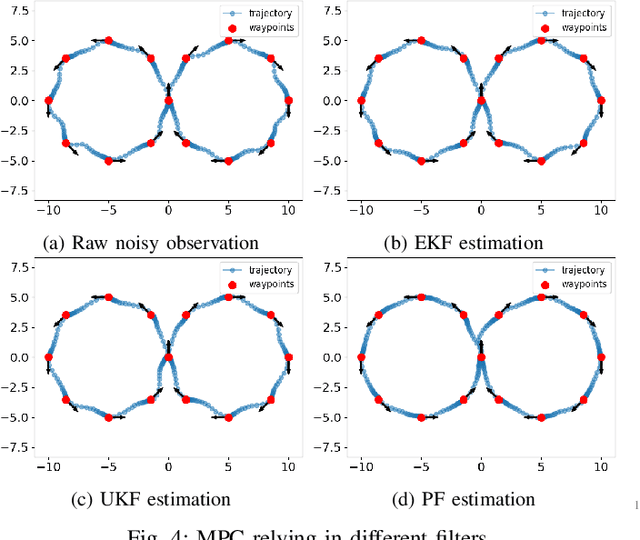
PyPose is an open-source library for robot learning. It combines a learning-based approach with physics-based optimization, which enables seamless end-to-end robot learning. It has been used in many tasks due to its meticulously designed application programming interface (API) and efficient implementation. From its initial launch in early 2022, PyPose has experienced significant enhancements, incorporating a wide variety of new features into its platform. To satisfy the growing demand for understanding and utilizing the library and reduce the learning curve of new users, we present the fundamental design principle of the imperative programming interface, and showcase the flexible usage of diverse functionalities and modules using an extremely simple Dubins car example. We also demonstrate that the PyPose can be easily used to navigate a real quadruped robot with a few lines of code.
Learning Koopman Operators with Control Using Bi-level Optimization
Jul 12, 2023



The accurate modeling and control of nonlinear dynamical effects are crucial for numerous robotic systems. The Koopman formalism emerges as a valuable tool for linear control design in nonlinear systems within unknown environments. However, it still remains a challenging task to learn the Koopman operator with control from data, and in particular, the simultaneous identification of the Koopman linear dynamics and the mapping between the state and Koopman spaces. Conventional approaches, based on single-level unconstrained optimization, may lack model robustness, training efficiency, and long-term predictive accuracy. This paper presents a bi-level optimization framework that jointly learns the Koopman embedding mapping and Koopman dynamics with explicit multi-step dynamical constraints, eliminating the need for heuristically-tuned loss terms. Leveraging implicit differentiation, our formulation allows back-propagation in standard learning framework and the use of state-of-the-art optimizers, yielding more stable and robust system performance over various applications compared to conventional methods.
PyPose: A Library for Robot Learning with Physics-based Optimization
Sep 30, 2022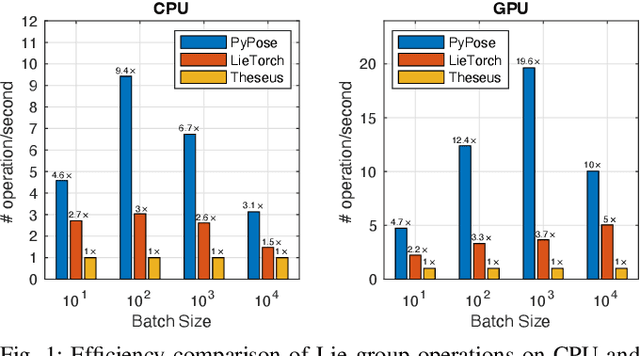
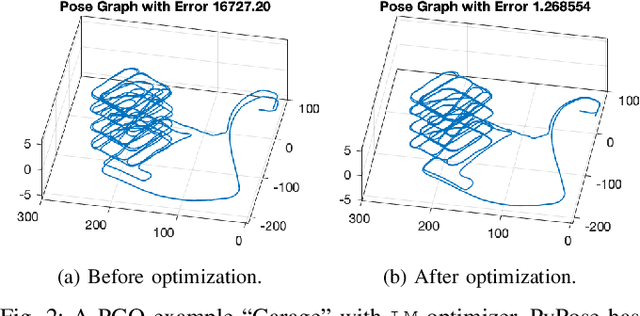
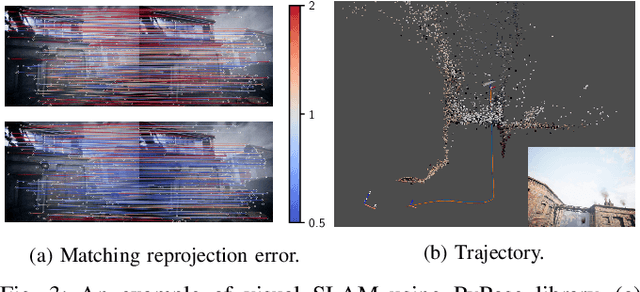
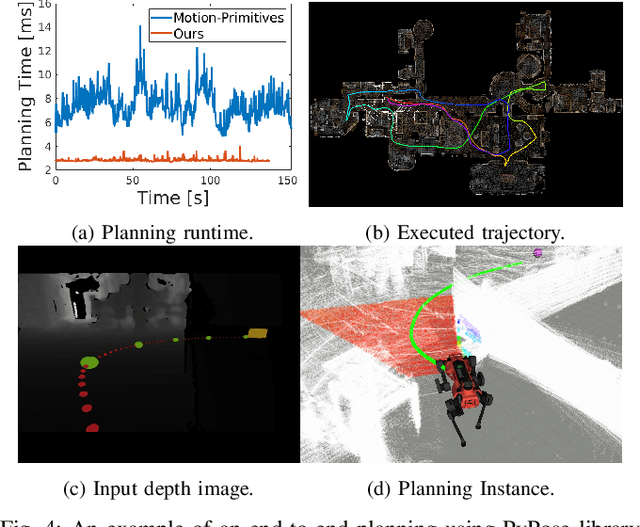
Deep learning has had remarkable success in robotic perception, but its data-centric nature suffers when it comes to generalizing to ever-changing environments. By contrast, physics-based optimization generalizes better, but it does not perform as well in complicated tasks due to the lack of high-level semantic information and the reliance on manual parametric tuning. To take advantage of these two complementary worlds, we present PyPose: a robotics-oriented, PyTorch-based library that combines deep perceptual models with physics-based optimization techniques. Our design goal for PyPose is to make it user-friendly, efficient, and interpretable with a tidy and well-organized architecture. Using an imperative style interface, it can be easily integrated into real-world robotic applications. Besides, it supports parallel computing of any order gradients of Lie groups and Lie algebras and $2^{\text{nd}}$-order optimizers, such as trust region methods. Experiments show that PyPose achieves 3-20$\times$ speedup in computation compared to state-of-the-art libraries. To boost future research, we provide concrete examples across several fields of robotics, including SLAM, inertial navigation, planning, and control.