 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePyPose: A Library for Robot Learning with Physics-based Optimization
Paper and Code
Sep 30, 2022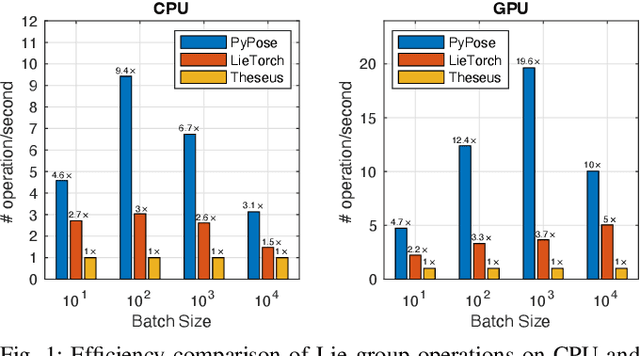
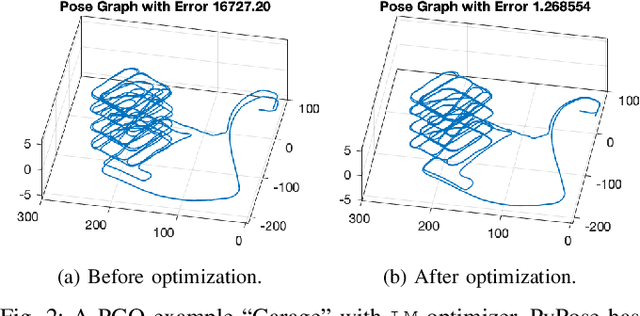
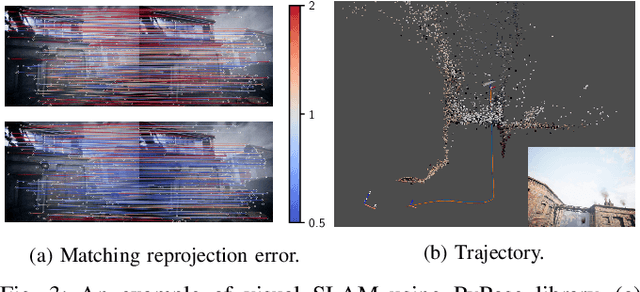
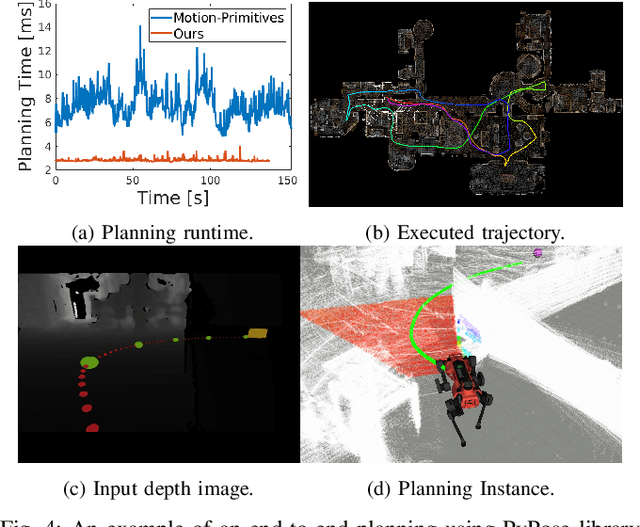
Deep learning has had remarkable success in robotic perception, but its data-centric nature suffers when it comes to generalizing to ever-changing environments. By contrast, physics-based optimization generalizes better, but it does not perform as well in complicated tasks due to the lack of high-level semantic information and the reliance on manual parametric tuning. To take advantage of these two complementary worlds, we present PyPose: a robotics-oriented, PyTorch-based library that combines deep perceptual models with physics-based optimization techniques. Our design goal for PyPose is to make it user-friendly, efficient, and interpretable with a tidy and well-organized architecture. Using an imperative style interface, it can be easily integrated into real-world robotic applications. Besides, it supports parallel computing of any order gradients of Lie groups and Lie algebras and $2^{\text{nd}}$-order optimizers, such as trust region methods. Experiments show that PyPose achieves 3-20$\times$ speedup in computation compared to state-of-the-art libraries. To boost future research, we provide concrete examples across several fields of robotics, including SLAM, inertial navigation, planning, and control.