 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysics-infused Learning for Aerial Manipulator in Winds and Near-Wall Environments
Mar 08, 2026Aerial manipulation (AM) expands UAV capabilities beyond passive observation to contact-based operations at high altitudes and in otherwise inaccessible environments. Although recent advances show promise, most AM systems are developed in controlled settings that overlook key aerodynamic effects. Simplified thrust models are often insufficient to capture the nonlinear wind disturbances and proximity-induced flow variations present in real-world environments near infrastructure, while high-fidelity CFD methods remain impractical for real-time use. Learning-based models are computationally efficient at inference, but often struggle to generalize to unseen condition. This paper combines both approaches by integrating a physics-based blade-element model with a learning-based residual force estimator, along with a rotor-speed allocation strategy for disturbance compensation, resulting in a unified control framework. The blade-element model computes per-rotor aerodynamic forces under wind and provides a refined feedforward disturbance estimate. A learning-based estimator then predicts the residual forces not captured by the model, enabling compensation for unmodeled aerodynamic effects. An online adaptation mechanism further updates the residual-force prediction and rotor-speed allocation jointly to reduce the mismatch between desired and realized thrust. We evaluate this framework in both free-flight and wall-contact tracking tasks in a simulated near-wall wind environment. Results demonstrate improved disturbance estimation and trajectory-tracking accuracy over conventional approaches, enabling robust wall-contact execution under challenging aerodynamic conditions.
Distributed State Estimation for Vision-Based Cooperative Slung Load Transportation in GPS-Denied Environments
Mar 04, 2026Transporting heavy or oversized slung loads using rotorcraft has traditionally relied on single-aircraft systems, which limits both payload capacity and control authority. Cooperative multilift using teams of rotorcraft offers a scalable and efficient alternative, especially for infrequent but challenging "long-tail" payloads without the need of building larger and larger rotorcraft. Most prior multilift research assumes GPS availability, uses centralized estimation architectures, or relies on controlled laboratory motion-capture setups. As a result, these methods lack robustness to sensor loss and are not viable in GPS-denied or operationally constrained environments. This paper addresses this limitation by presenting a distributed and decentralized payload state estimation framework for vision-based multilift operations. Using onboard monocular cameras, each UAV detects a fiducial marker on the payload and estimates its relative pose. These measurements are fused via a Distributed and Decentralized Extended Information Filter (DDEIF), enabling robust and scalable estimation that is resilient to individual sensor dropouts. This payload state estimate is then used for closed-loop trajectory tracking control. Monte Carlo simulation results in Gazebo show the effectiveness of the proposed approach, including the effect of communication loss during flight.
* In proceedings of the 2026 AIAA SciTech Forum, Session: Intelligent Systems-27
Aerial Manipulation with Contact-Aware Onboard Perception and Hybrid Control
Feb 09, 2026Aerial manipulation (AM) promises to move Unmanned Aerial Vehicles (UAVs) beyond passive inspection to contact-rich tasks such as grasping, assembly, and in-situ maintenance. Most prior AM demonstrations rely on external motion capture (MoCap) and emphasize position control for coarse interactions, limiting deployability. We present a fully onboard perception-control pipeline for contact-rich AM that achieves accurate motion tracking and regulated contact wrenches without MoCap. The main components are (1) an augmented visual-inertial odometry (VIO) estimator with contact-consistency factors that activate only during interaction, tightening uncertainty around the contact frame and reducing drift, and (2) image-based visual servoing (IBVS) to mitigate perception-control coupling, together with a hybrid force-motion controller that regulates contact wrenches and lateral motion for stable contact. Experiments show that our approach closes the perception-to-wrench loop using only onboard sensing, yielding an velocity estimation improvement of 66.01% at contact, reliable target approach, and stable force holding-pointing toward deployable, in-the-wild aerial manipulation.
Imperative MPC: An End-to-End Self-Supervised Learning with Differentiable MPC for UAV Attitude Control
Apr 17, 2025



Modeling and control of nonlinear dynamics are critical in robotics, especially in scenarios with unpredictable external influences and complex dynamics. Traditional cascaded modular control pipelines often yield suboptimal performance due to conservative assumptions and tedious parameter tuning. Pure data-driven approaches promise robust performance but suffer from low sample efficiency, sim-to-real gaps, and reliance on extensive datasets. Hybrid methods combining learning-based and traditional model-based control in an end-to-end manner offer a promising alternative. This work presents a self-supervised learning framework combining learning-based inertial odometry (IO) module and differentiable model predictive control (d-MPC) for Unmanned Aerial Vehicle (UAV) attitude control. The IO denoises raw IMU measurements and predicts UAV attitudes, which are then optimized by MPC for control actions in a bi-level optimization (BLO) setup, where the inner MPC optimizes control actions and the upper level minimizes discrepancy between real-world and predicted performance. The framework is thus end-to-end and can be trained in a self-supervised manner. This approach combines the strength of learning-based perception with the interpretable model-based control. Results show the effectiveness even under strong wind. It can simultaneously enhance both the MPC parameter learning and IMU prediction performance.
Flying Hand: End-Effector-Centric Framework for Versatile Aerial Manipulation Teleoperation and Policy Learning
Apr 14, 2025Aerial manipulation has recently attracted increasing interest from both industry and academia. Previous approaches have demonstrated success in various specific tasks. However, their hardware design and control frameworks are often tightly coupled with task specifications, limiting the development of cross-task and cross-platform algorithms. Inspired by the success of robot learning in tabletop manipulation, we propose a unified aerial manipulation framework with an end-effector-centric interface that decouples high-level platform-agnostic decision-making from task-agnostic low-level control. Our framework consists of a fully-actuated hexarotor with a 4-DoF robotic arm, an end-effector-centric whole-body model predictive controller, and a high-level policy. The high-precision end-effector controller enables efficient and intuitive aerial teleoperation for versatile tasks and facilitates the development of imitation learning policies. Real-world experiments show that the proposed framework significantly improves end-effector tracking accuracy, and can handle multiple aerial teleoperation and imitation learning tasks, including writing, peg-in-hole, pick and place, changing light bulbs, etc. We believe the proposed framework provides one way to standardize and unify aerial manipulation into the general manipulation community and to advance the field. Project website: https://lecar-lab.github.io/flying_hand/.
A Self-Supervised Learning Approach with Differentiable Optimization for UAV Trajectory Planning
Apr 05, 2025


While Unmanned Aerial Vehicles (UAVs) have gained significant traction across various fields, path planning in 3D environments remains a critical challenge, particularly under size, weight, and power (SWAP) constraints. Traditional modular planning systems often introduce latency and suboptimal performance due to limited information sharing and local minima issues. End-to-end learning approaches streamline the pipeline by mapping sensory observations directly to actions but require large-scale datasets, face significant sim-to-real gaps, or lack dynamical feasibility. In this paper, we propose a self-supervised UAV trajectory planning pipeline that integrates a learning-based depth perception with differentiable trajectory optimization. A 3D cost map guides UAV behavior without expert demonstrations or human labels. Additionally, we incorporate a neural network-based time allocation strategy to improve the efficiency and optimality. The system thus combines robust learning-based perception with reliable physics-based optimization for improved generalizability and interpretability. Both simulation and real-world experiments validate our approach across various environments, demonstrating its effectiveness and robustness. Our method achieves a 31.33% improvement in position tracking error and 49.37% reduction in control effort compared to the state-of-the-art.
AirIO: Learning Inertial Odometry with Enhanced IMU Feature Observability
Jan 26, 2025



Inertial odometry (IO) using only Inertial Measurement Units (IMUs) offers a lightweight and cost-effective solution for Unmanned Aerial Vehicle (UAV) applications, yet existing learning-based IO models often fail to generalize to UAVs due to the highly dynamic and non-linear-flight patterns that differ from pedestrian motion. In this work, we identify that the conventional practice of transforming raw IMU data to global coordinates undermines the observability of critical kinematic information in UAVs. By preserving the body-frame representation, our method achieves substantial performance improvements, with a 66.7% average increase in accuracy across three datasets. Furthermore, explicitly encoding attitude information into the motion network results in an additional 23.8% improvement over prior results. Combined with a data-driven IMU correction model (AirIMU) and an uncertainty-aware Extended Kalman Filter (EKF), our approach ensures robust state estimation under aggressive UAV maneuvers without relying on external sensors or control inputs. Notably, our method also demonstrates strong generalizability to unseen data not included in the training set, underscoring its potential for real-world UAV applications.
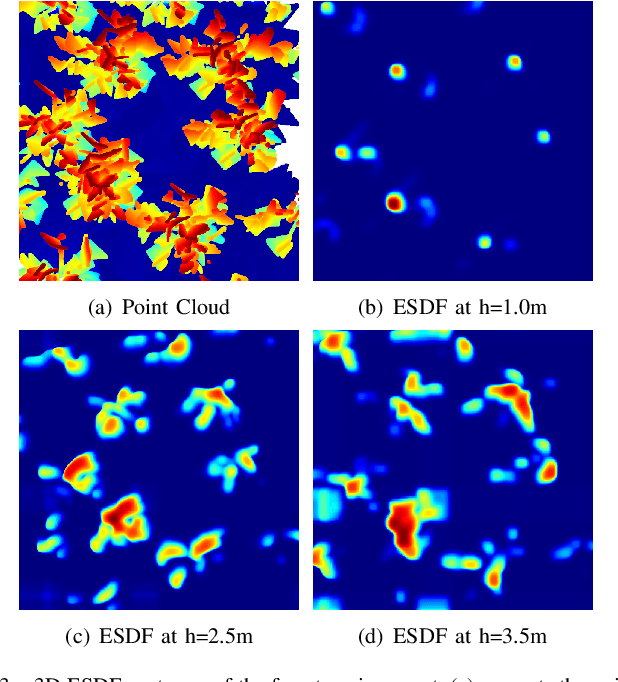
iKap: Kinematics-aware Planning with Imperative Learning
Dec 12, 2024
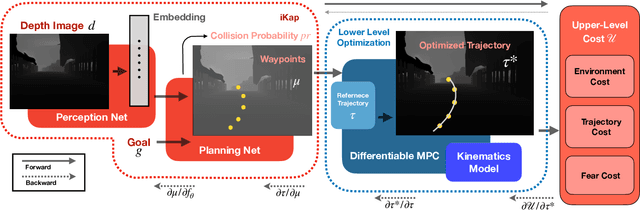


Trajectory planning in robotics aims to generate collision-free pose sequences that can be reliably executed. Recently, vision-to-planning systems have garnered increasing attention for their efficiency and ability to interpret and adapt to surrounding environments. However, traditional modular systems suffer from increased latency and error propagation, while purely data-driven approaches often overlook the robot's kinematic constraints. This oversight leads to discrepancies between planned trajectories and those that are executable. To address these challenges, we propose iKap, a novel vision-to-planning system that integrates the robot's kinematic model directly into the learning pipeline. iKap employs a self-supervised learning approach and incorporates the state transition model within a differentiable bi-level optimization framework. This integration ensures the network learns collision-free waypoints while satisfying kinematic constraints, enabling gradient back-propagation for end-to-end training. Our experimental results demonstrate that iKap achieves higher success rates and reduced latency compared to the state-of-the-art methods. Besides the complete system, iKap offers a visual-to-planning network that seamlessly integrates kinematics into various controllers, providing a robust solution for robots navigating complex and dynamic environments.
Flying Calligrapher: Contact-Aware Motion and Force Planning and Control for Aerial Manipulation
Jul 08, 2024



Aerial manipulation has gained interest in completing high-altitude tasks that are challenging for human workers, such as contact inspection and defect detection, etc. Previous research has focused on maintaining static contact points or forces. This letter addresses a more general and dynamic task: simultaneously tracking time-varying contact force in the surface normal direction and motion trajectories on tangential surfaces. We propose a pipeline that includes a contact-aware trajectory planner to generate dynamically feasible trajectories, and a hybrid motion-force controller to track such trajectories. We demonstrate the approach in an aerial calligraphy task using a novel sponge pen design as the end-effector, whose stroke width is proportional to the contact force. Additionally, we develop a touchscreen interface for flexible user input. Experiments show our method can effectively draw diverse letters, achieving an IoU of 0.59 and an end-effector position (force) tracking RMSE of 2.9 cm (0.7 N). Website: https://xiaofeng-guo.github.io/flying-calligrapher/
Imperative Learning: A Self-supervised Neural-Symbolic Learning Framework for Robot Autonomy
Jun 23, 2024



Data-driven methods such as reinforcement and imitation learning have achieved remarkable success in robot autonomy. However, their data-centric nature still hinders them from generalizing well to ever-changing environments. Moreover, collecting large datasets for robotic tasks is often impractical and expensive. To overcome these challenges, we introduce a new self-supervised neural-symbolic (NeSy) computational framework, imperative learning (IL), for robot autonomy, leveraging the generalization abilities of symbolic reasoning. The framework of IL consists of three primary components: a neural module, a reasoning engine, and a memory system. We formulate IL as a special bilevel optimization (BLO), which enables reciprocal learning over the three modules. This overcomes the label-intensive obstacles associated with data-driven approaches and takes advantage of symbolic reasoning concerning logical reasoning, physical principles, geometric analysis, etc. We discuss several optimization techniques for IL and verify their effectiveness in five distinct robot autonomy tasks including path planning, rule induction, optimal control, visual odometry, and multi-robot routing. Through various experiments, we show that IL can significantly enhance robot autonomy capabilities and we anticipate that it will catalyze further research across diverse domains.