 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFedTeddi: Temporal Drift and Divergence Aware Scheduling for Timely Federated Edge Learning
Sep 09, 2025Federated edge learning (FEEL) enables collaborative model training across distributed clients over wireless networks without exposing raw data. While most existing studies assume static datasets, in real-world scenarios clients may continuously collect data with time-varying and non-independent and identically distributed (non-i.i.d.) characteristics. A critical challenge is how to adapt models in a timely yet efficient manner to such evolving data. In this paper, we propose FedTeddi, a temporal-drift-and-divergence-aware scheduling algorithm that facilitates fast convergence of FEEL under dynamic data evolution and communication resource limits. We first quantify the temporal dynamics and non-i.i.d. characteristics of data using temporal drift and collective divergence, respectively, and represent them as the Earth Mover's Distance (EMD) of class distributions for classification tasks. We then propose a novel optimization objective and develop a joint scheduling and bandwidth allocation algorithm, enabling the FEEL system to learn from new data quickly without forgetting previous knowledge. Experimental results show that our algorithm achieves higher test accuracy and faster convergence compared to benchmark methods, improving the rate of convergence by 58.4% on CIFAR-10 and 49.2% on CIFAR-100 compared to random scheduling.
FedCGD: Collective Gradient Divergence Optimized Scheduling for Wireless Federated Learning
Jun 09, 2025Federated learning (FL) is a promising paradigm for multiple devices to cooperatively train a model. When applied in wireless networks, two issues consistently affect the performance of FL, i.e., data heterogeneity of devices and limited bandwidth. Many papers have investigated device scheduling strategies considering the two issues. However, most of them recognize data heterogeneity as a property of individual devices. In this paper, we prove that the convergence speed of FL is affected by the sum of device-level and sample-level collective gradient divergence (CGD). The device-level CGD refers to the gradient divergence of the scheduled device group, instead of the sum of the individual device divergence. The sample-level CGD is statistically upper bounded by sampling variance, which is inversely proportional to the total number of samples scheduled for local update. To derive a tractable form of the device-level CGD, we further consider a classification problem and transform it into the weighted earth moving distance (WEMD) between the group distribution and the global distribution. Then we propose FedCGD algorithm to minimize the sum of multi-level CGDs by balancing WEMD and sampling variance, within polynomial time. Simulation shows that the proposed strategy increases classification accuracy on the CIFAR-10 dataset by up to 4.2\% while scheduling 41.8\% fewer devices, and flexibly switches between reducing WEMD and reducing sampling variance.
Mobility-Aware Asynchronous Federated Learning with Dynamic Sparsification
Jun 08, 2025Asynchronous Federated Learning (AFL) enables distributed model training across multiple mobile devices, allowing each device to independently update its local model without waiting for others. However, device mobility introduces intermittent connectivity, which necessitates gradient sparsification and leads to model staleness, jointly affecting AFL convergence. This paper develops a theoretical model to characterize the interplay among sparsification, model staleness and mobility-induced contact patterns, and their joint impact on AFL convergence. Based on the analysis, we propose a mobility-aware dynamic sparsification (MADS) algorithm that optimizes the sparsification degree based on contact time and model staleness. Closed-form solutions are derived, showing that under low-speed conditions, MADS increases the sparsification degree to enhance convergence, while under high-speed conditions, it reduces the sparsification degree to guarantee reliable uploads within limited contact time. Experimental results validate the theoretical findings. Compared with the state-of-the-art benchmarks, the MADS algorithm increases the image classification accuracy on the CIFAR-10 dataset by 8.76% and reduces the average displacement error in the Argoverse trajectory prediction dataset by 9.46%.
Benchmarking Model Predictive Control and Reinforcement Learning Based Control for Legged Robot Locomotion in MuJoCo Simulation
Jan 28, 2025



Model Predictive Control (MPC) and Reinforcement Learning (RL) are two prominent strategies for controlling legged robots, each with unique strengths. RL learns control policies through system interaction, adapting to various scenarios, whereas MPC relies on a predefined mathematical model to solve optimization problems in real-time. Despite their widespread use, there is a lack of direct comparative analysis under standardized conditions. This work addresses this gap by benchmarking MPC and RL controllers on a Unitree Go1 quadruped robot within the MuJoCo simulation environment, focusing on a standardized task-straight walking at a constant velocity. Performance is evaluated based on disturbance rejection, energy efficiency, and terrain adaptability. The results show that RL excels in handling disturbances and maintaining energy efficiency but struggles with generalization to new terrains due to its dependence on learned policies tailored to specific environments. In contrast, MPC shows enhanced recovery capabilities from larger perturbations by leveraging its optimization-based approach, allowing for a balanced distribution of control efforts across the robot's joints. The results provide a clear understanding of the advantages and limitations of both RL and MPC, offering insights into selecting an appropriate control strategy for legged robotic applications.
OpenHumanVid: A Large-Scale High-Quality Dataset for Enhancing Human-Centric Video Generation
Dec 03, 2024



Recent advancements in visual generation technologies have markedly increased the scale and availability of video datasets, which are crucial for training effective video generation models. However, a significant lack of high-quality, human-centric video datasets presents a challenge to progress in this field. To bridge this gap, we introduce OpenHumanVid, a large-scale and high-quality human-centric video dataset characterized by precise and detailed captions that encompass both human appearance and motion states, along with supplementary human motion conditions, including skeleton sequences and speech audio. To validate the efficacy of this dataset and the associated training strategies, we propose an extension of existing classical diffusion transformer architectures and conduct further pretraining of our models on the proposed dataset. Our findings yield two critical insights: First, the incorporation of a large-scale, high-quality dataset substantially enhances evaluation metrics for generated human videos while preserving performance in general video generation tasks. Second, the effective alignment of text with human appearance, human motion, and facial motion is essential for producing high-quality video outputs. Based on these insights and corresponding methodologies, the straightforward extended network trained on the proposed dataset demonstrates an obvious improvement in the generation of human-centric videos. Project page https://fudan-generative-vision.github.io/OpenHumanVid
Dynamic Scheduling for Vehicle-to-Vehicle Communications Enhanced Federated Learning
Jun 25, 2024



Leveraging the computing and sensing capabilities of vehicles, vehicular federated learning (VFL) has been applied to edge training for connected vehicles. The dynamic and interconnected nature of vehicular networks presents unique opportunities to harness direct vehicle-to-vehicle (V2V) communications, enhancing VFL training efficiency. In this paper, we formulate a stochastic optimization problem to optimize the VFL training performance, considering the energy constraints and mobility of vehicles, and propose a V2V-enhanced dynamic scheduling (VEDS) algorithm to solve it. The model aggregation requirements of VFL and the limited transmission time due to mobility result in a stepwise objective function, which presents challenges in solving the problem. We thus propose a derivative-based drift-plus-penalty method to convert the long-term stochastic optimization problem to an online mixed integer nonlinear programming (MINLP) problem, and provide a theoretical analysis to bound the performance gap between the online solution and the offline optimal solution. Further analysis of the scheduling priority reduces the original problem into a set of convex optimization problems, which are efficiently solved using the interior-point method. Experimental results demonstrate that compared with the state-of-the-art benchmarks, the proposed algorithm enhances the image classification accuracy on the CIFAR-10 dataset by 3.18% and reduces the average displacement errors on the Argoverse trajectory prediction dataset by 10.21%.
Mobility Accelerates Learning: Convergence Analysis on Hierarchical Federated Learning in Vehicular Networks
Jan 18, 2024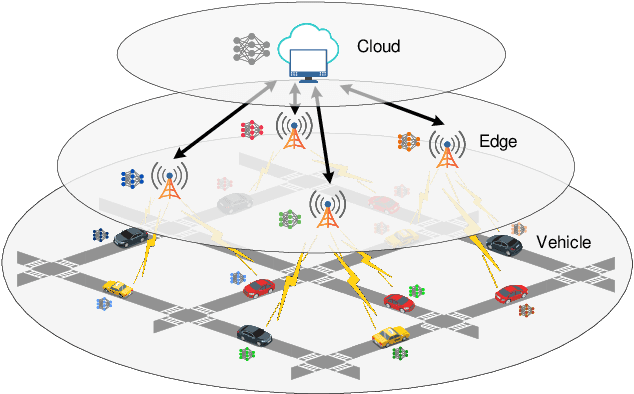
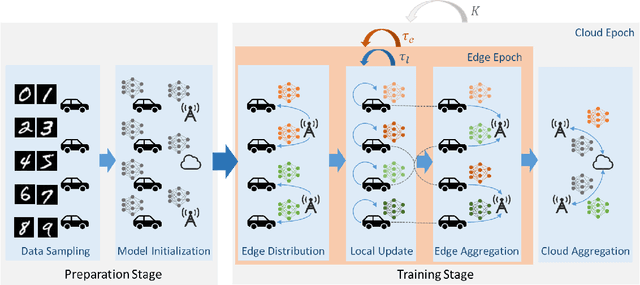
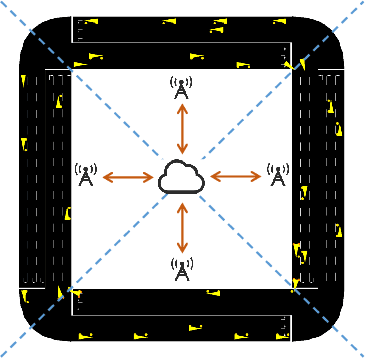
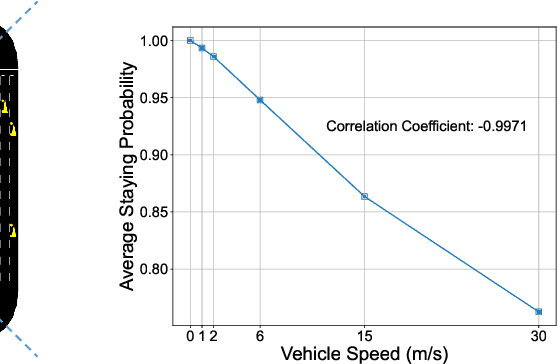
Hierarchical federated learning (HFL) enables distributed training of models across multiple devices with the help of several edge servers and a cloud edge server in a privacy-preserving manner. In this paper, we consider HFL with highly mobile devices, mainly targeting at vehicular networks. Through convergence analysis, we show that mobility influences the convergence speed by both fusing the edge data and shuffling the edge models. While mobility is usually considered as a challenge from the perspective of communication, we prove that it increases the convergence speed of HFL with edge-level heterogeneous data, since more diverse data can be incorporated. Furthermore, we demonstrate that a higher speed leads to faster convergence, since it accelerates the fusion of data. Simulation results show that mobility increases the model accuracy of HFL by up to 15.1% when training a convolutional neural network on the CIFAR-10 dataset.
The Impact of Time Step Frequency on the Realism of Robotic Manipulation Simulation for Objects of Different Scales
Oct 12, 2023This work evaluates the impact of time step frequency and component scale on robotic manipulation simulation accuracy. Increasing the time step frequency for small-scale objects is shown to improve simulation accuracy. This simulation, demonstrating pre-assembly part picking for two object geometries, serves as a starting point for discussing how to improve Sim2Real transfer in robotic assembly processes.
Data-Heterogeneous Hierarchical Federated Learning with Mobility
Jun 19, 2023Federated learning enables distributed training of machine learning (ML) models across multiple devices in a privacy-preserving manner. Hierarchical federated learning (HFL) is further proposed to meet the requirements of both latency and coverage. In this paper, we consider a data-heterogeneous HFL scenario with mobility, mainly targeting vehicular networks. We derive the convergence upper bound of HFL with respect to mobility and data heterogeneity, and analyze how mobility impacts the performance of HFL. While mobility is considered as a challenge from a communication point of view, our goal here is to exploit mobility to improve the learning performance by mitigating data heterogeneity. Simulation results verify the analysis and show that mobility can indeed improve the model accuracy by up to 15.1\% when training a convolutional neural network on the CIFAR-10 dataset using HFL.
Hypergraph-based Multi-Robot Task and Motion Planning
Oct 09, 2022
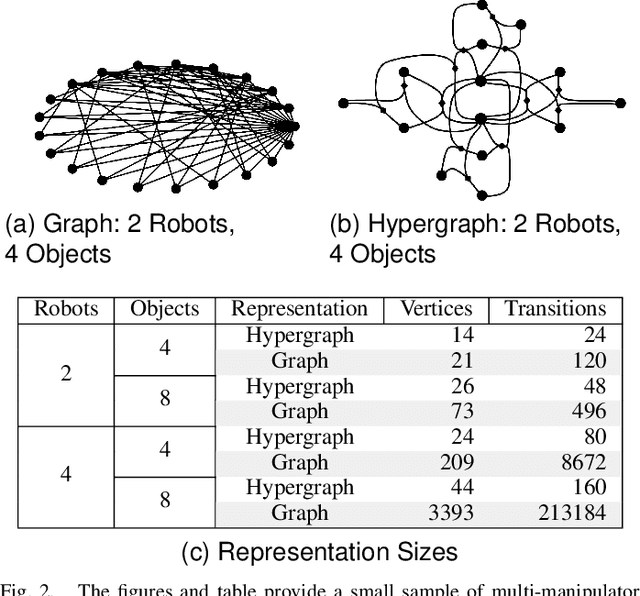
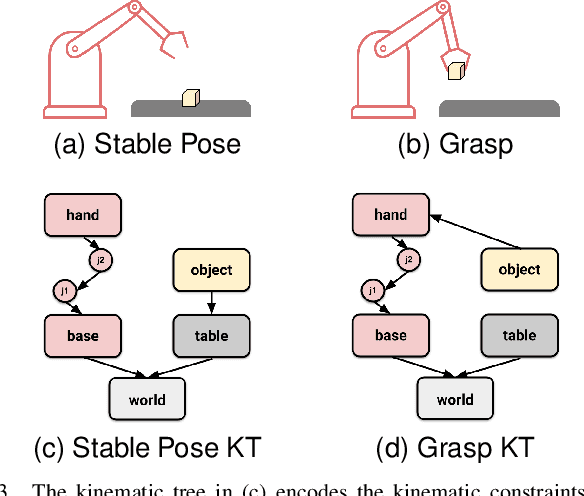

We present a multi-robot task and motion planning method that, when applied to the rearrangement of objects by manipulators, produces solution times up to three orders of magnitude faster than existing methods. We achieve this improvement by decomposing the planning space into subspaces for independent manipulators, objects, and manipulators holding objects. We represent this decomposition with a hypergraph where vertices are substates and hyperarcs are transitions between substates. Existing methods use graph-based representations where vertices are full states and edges are transitions between states. Using the hypergraph reduces the size of the planning space-for multi-manipulator object rearrangement, the number of hypergraph vertices scales linearly with the number of either robots or objects, while the number of hyperarcs scales quadratically with the number of robots and linearly with the number of objects. In contrast, the number of vertices and edges in graph-based representations scale exponentially in the number of robots and objects. Additionally, the hypergraph provides a structure to reason over varying levels of (de)coupled spaces and transitions between them enabling a hybrid search of the planning space. We show that similar gains can be achieved for other multi-robot task and motion planning problems.