 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSerialized Red-Green-Gray: Quicker Heuristic Validation of Edges in Dynamic Roadmap Graphs
Mar 30, 2026Motion planning in dynamic environments, such as robotic warehouses, requires fast adaptation to frequent changes in obstacle poses. Traditional roadmap-based methods struggle in such settings, relying on inefficient reconstruction of a roadmap or expensive collision detection to update the existing roadmap. To address these challenges we introduce the Red-Green-Gray (RGG) framework, a method that builds on SPITE to quickly classify roadmap edges as invalid (red), valid (green), or uncertain (gray) using conservative geometric approximations. Serial RGG provides a high-performance variant leveraging batch serialization and vectorization to enable efficient GPU acceleration. Empirical results demonstrate that while RGG effectively reduces the number of unknown edges requiring full validation, SerRGG achieves a 2-9x speedup compared to the sequential implementation. This combination of geometric precision and computational speed makes SerRGG highly effective for time-critical robotic applications.
From Legible to Inscrutable Trajectories: (Il)legible Motion Planning Accounting for Multiple Observers
Feb 09, 2026In cooperative environments, such as in factories or assistive scenarios, it is important for a robot to communicate its intentions to observers, who could be either other humans or robots. A legible trajectory allows an observer to quickly and accurately predict an agent's intention. In adversarial environments, such as in military operations or games, it is important for a robot to not communicate its intentions to observers. An illegible trajectory leads an observer to incorrectly predict the agent's intention or delays when an observer is able to make a correct prediction about the agent's intention. However, in some environments there are multiple observers, each of whom may be able to see only part of the environment, and each of whom may have different motives. In this work, we introduce the Mixed-Motive Limited-Observability Legible Motion Planning (MMLO-LMP) problem, which requires a motion planner to generate a trajectory that is legible to observers with positive motives and illegible to observers with negative motives while also considering the visibility limitations of each observer. We highlight multiple strategies an agent can take while still achieving the problem objective. We also present DUBIOUS, a trajectory optimizer that solves MMLO-LMP. Our results show that DUBIOUS can generate trajectories that balance legibility with the motives and limited visibility regions of the observers. Future work includes many variations of MMLO-LMP, including moving observers and observer teaming.
Quick Heuristic Validation of Edges in Dynamic Roadmap Graphs
Jan 28, 2026In this paper we tackle the problem of adjusting roadmap graphs for robot motion planning to non-static environments. We introduce the "Red-Green-Gray" paradigm, a modification of the SPITE method, capable of classifying the validity status of nodes and edges using cheap heuristic checks, allowing fast semi-lazy roadmap updates. Given a roadmap, we use simple computational geometry methods to approximate the swept volumes of robots and perform lazy collision checks, and label a subset of the edges as invalid (red), valid (green), or unknown (gray). We present preliminary experimental results comparing our method to the well-established technique of Leven and Hutchinson, and showing increased accuracy as well as the ability to correctly label edges as invalid while maintaining comparable update runtimes.
Edge Nearest Neighbor in Sampling-Based Motion Planning
Jun 16, 2025Neighborhood finders and nearest neighbor queries are fundamental parts of sampling based motion planning algorithms. Using different distance metrics or otherwise changing the definition of a neighborhood produces different algorithms with unique empiric and theoretical properties. In \cite{l-pa-06} LaValle suggests a neighborhood finder for the Rapidly-exploring Random Tree RRT algorithm \cite{l-rrtnt-98} which finds the nearest neighbor of the sampled point on the swath of the tree, that is on the set of all of the points on the tree edges, using a hierarchical data structure. In this paper we implement such a neighborhood finder and show, theoretically and experimentally, that this results in more efficient algorithms, and suggest a variant of the Rapidly-exploring Random Graph RRG algorithm \cite{f-isaom-10} that better exploits the exploration properties of the newly described subroutine for finding narrow passages.
PRISM: Complete Online Decentralized Multi-Agent Pathfinding with Rapid Information Sharing using Motion Constraints
May 12, 2025We introduce PRISM (Pathfinding with Rapid Information Sharing using Motion Constraints), a decentralized algorithm designed to address the multi-task multi-agent pathfinding (MT-MAPF) problem. PRISM enables large teams of agents to concurrently plan safe and efficient paths for multiple tasks while avoiding collisions. It employs a rapid communication strategy that uses information packets to exchange motion constraint information, enhancing cooperative pathfinding and situational awareness, even in scenarios without direct communication. We prove that PRISM resolves and avoids all deadlock scenarios when possible, a critical challenge in decentralized pathfinding. Empirically, we evaluate PRISM across five environments and 25 random scenarios, benchmarking it against the centralized Conflict-Based Search (CBS) and the decentralized Token Passing with Task Swaps (TPTS) algorithms. PRISM demonstrates scalability and solution quality, supporting 3.4 times more agents than CBS and handling up to 2.5 times more tasks in narrow passage environments than TPTS. Additionally, PRISM matches CBS in solution quality while achieving faster computation times, even under low-connectivity conditions. Its decentralized design reduces the computational burden on individual agents, making it scalable for large environments. These results confirm PRISM's robustness, scalability, and effectiveness in complex and dynamic pathfinding scenarios.
Path Database Guidance for Motion Planning
Apr 07, 2025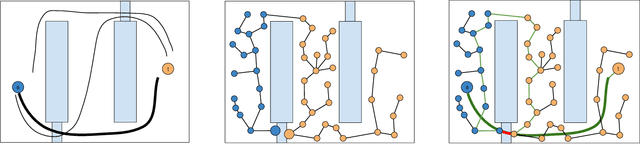

One approach to using prior experience in robot motion planning is to store solutions to previously seen problems in a database of paths. Methods that use such databases are characterized by how they query for a path and how they use queries given a new problem. In this work we present a new method, Path Database Guidance (PDG), which innovates on existing work in two ways. First, we use the database to compute a heuristic for determining which nodes of a search tree to expand, in contrast to prior work which generally pastes the (possibly transformed) queried path or uses it to bias a sampling distribution. We demonstrate that this makes our method more easily composable with other search methods by dynamically interleaving exploration according to a baseline algorithm with exploitation of the database guidance. Second, in contrast to other methods that treat the database as a single fixed prior, our database (and thus our queried heuristic) updates as we search the implicitly defined robot configuration space. We experimentally demonstrate the effectiveness of PDG in a variety of explicitly defined environment distributions in simulation.
Lazy-DaSH: Lazy Approach for Hypergraph-based Multi-robot Task and Motion Planning
Apr 07, 2025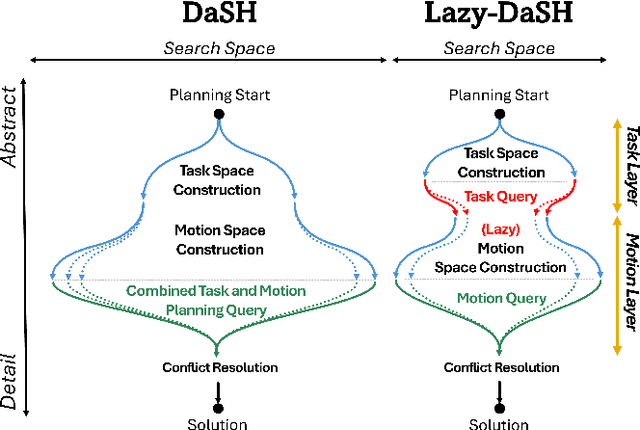
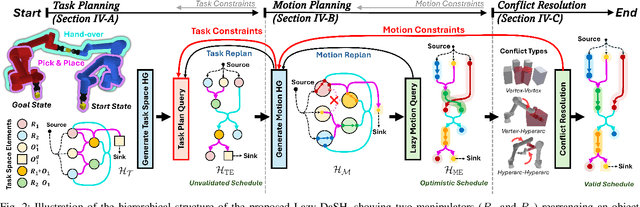
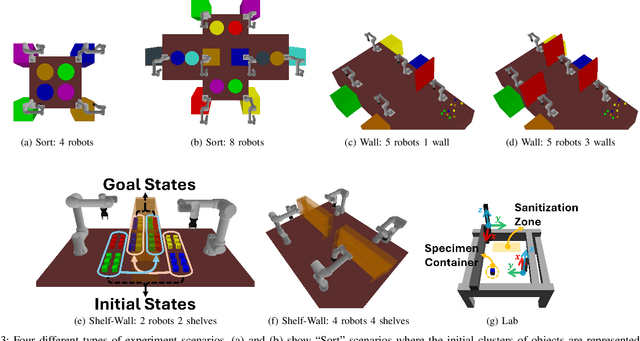
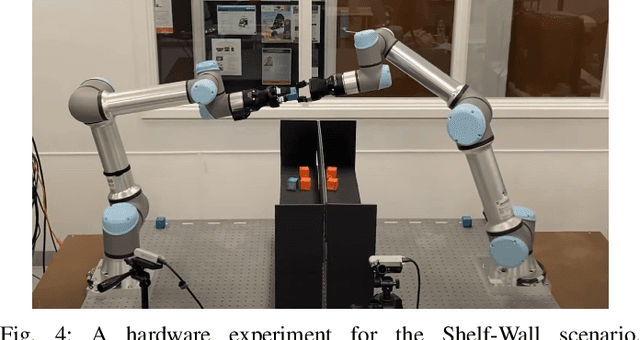
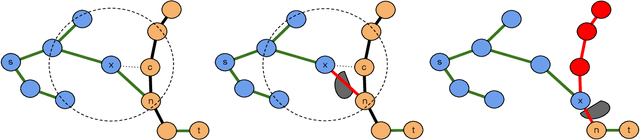
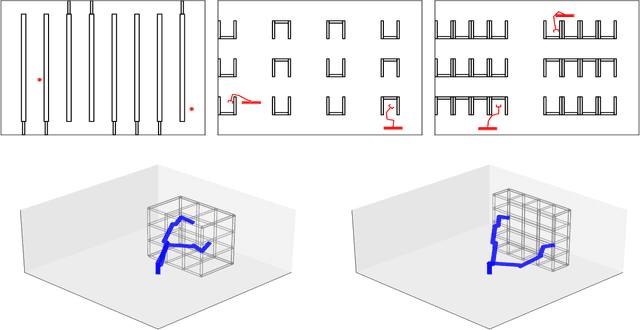
We introduce Lazy-DaSH, an improvement over the recent state of the art multi-robot task and motion planning method DaSH, which scales to more than double the number of robots and objects compared to the original method and achieves an order of magnitude faster planning time when applied to a multi-manipulator object rearrangement problem. We achieve this improvement through a hierarchical approach, where a high-level task planning layer identifies planning spaces required for task completion, and motion feasibility is validated lazily only within these spaces. In contrast, DaSH precomputes the motion feasibility of all possible actions, resulting in higher costs for constructing state space representations. Lazy-DaSH maintains efficient query performance by utilizing a constraint feedback mechanism within its hierarchical structure, ensuring that motion feasibility is effectively conveyed to the query process. By maintaining smaller state space representations, our method significantly reduces both representation construction time and query time. We evaluate Lazy-DaSH in four distinct scenarios, demonstrating its scalability to increasing numbers of robots and objects, as well as its adaptability in resolving conflicts through the constraint feedback mechanism.
K-ARC: Adaptive Robot Coordination for Multi-Robot Kinodynamic Planning
Jan 02, 2025



This work presents Kinodynamic Adaptive Robot Coordination (K-ARC), a novel algorithm for multi-robot kinodynamic planning. Our experimental results show the capability of K-ARC to plan for up to 32 planar mobile robots, while achieving up to an order of magnitude of speed-up compared to previous methods in various scenarios. K-ARC is able to achieve this due to its two main properties. First, K-ARC constructs its solution iteratively by planning in segments, where initial kinodynamic paths are found through optimization-based approaches and the inter-robot conflicts are resolved through sampling-based approaches. The interleaving use of sampling-based and optimization-based approaches allows K-ARC to leverage the strengths of both approaches in different sections of the planning process where one is more suited than the other, while previous methods tend to emphasize on one over the other. Second, K-ARC builds on a previously proposed multi-robot motion planning framework, Adaptive Robot Coordination (ARC), and inherits its strength of focusing on coordination between robots only when needed, saving computation efforts. We show how the combination of these two properties allows K-ARC to achieve overall better performance in our simulated experiments with increasing numbers of robots, increasing degrees of problem difficulties, and increasing complexities of robot dynamics.
Experience-based Subproblem Planning for Multi-Robot Motion Planning
Nov 13, 2024



Multi-robot systems enhance efficiency and productivity across various applications, from manufacturing to surveillance. While single-robot motion planning has improved by using databases of prior solutions, extending this approach to multi-robot motion planning (MRMP) presents challenges due to the increased complexity and diversity of tasks and configurations. Recent discrete methods have attempted to address this by focusing on relevant lower-dimensional subproblems, but they are inadequate for complex scenarios like those involving manipulator robots. To overcome this, we propose a novel approach that %leverages experience-based planning by constructs and utilizes databases of solutions for smaller sub-problems. By focusing on interactions between fewer robots, our method reduces the need for exhaustive database growth, allowing for efficient handling of more complex MRMP scenarios. We validate our approach with experiments involving both mobile and manipulator robots, demonstrating significant improvements over existing methods in scalability and planning efficiency. Our contributions include a rapidly constructed database for low-dimensional MRMP problems, a framework for applying these solutions to larger problems, and experimental validation with up to 32 mobile and 16 manipulator robots.
Encoding Reusable Multi-Robot Planning Strategies as Abstract Hypergraphs
Sep 16, 2024


Multi-Robot Task Planning (MR-TP) is the search for a discrete-action plan a team of robots should take to complete a task. The complexity of such problems scales exponentially with the number of robots and task complexity, making them challenging for online solution. To accelerate MR-TP over a system's lifetime, this work looks at combining two recent advances: (i) Decomposable State Space Hypergraph (DaSH), a novel hypergraph-based framework to efficiently model and solve MR-TP problems; and \mbox{(ii) learning-by-abstraction,} a technique that enables automatic extraction of generalizable planning strategies from individual planning experiences for later reuse. Specifically, we wish to extend this strategy-learning technique, originally designed for single-robot planning, to benefit multi-robot planning using hypergraph-based MR-TP.