 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSPITE: Simple Polyhedral Intersection Techniques for modified Environments
Jun 28, 2024
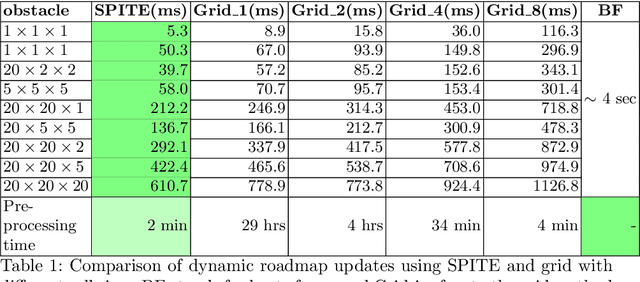

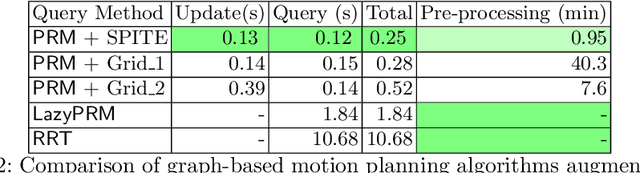
Motion planning in modified environments is a challenging task, as it compounds the innate difficulty of the motion planning problem with a changing environment. This renders some algorithmic methods such as probabilistic roadmaps less viable, as nodes and edges may become invalid as a result of these changes. In this paper, we present a method of transforming any configuration space graph, such as a roadmap, to a dynamic data structure capable of updating the validity of its nodes and edges in response to discrete changes in obstacle positions. We use methods from computational geometry to compute 3D swept volume approximations of configuration space points and curves to achieve 10-40 percent faster updates and up to 60 percent faster motion planning queries than previous algorithms while requiring a significantly shorter pre-processing phase, requiring minutes instead of hours needed by the competing method to achieve somewhat similar update times.