 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath Database Guidance for Motion Planning
Paper and Code
Apr 07, 2025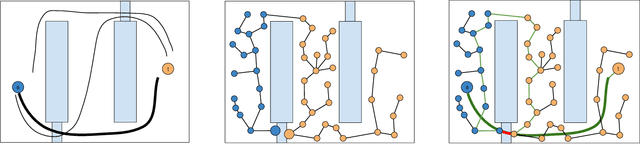

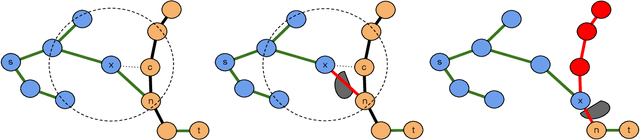
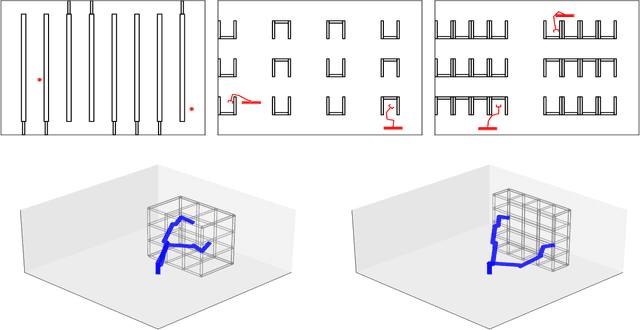
One approach to using prior experience in robot motion planning is to store solutions to previously seen problems in a database of paths. Methods that use such databases are characterized by how they query for a path and how they use queries given a new problem. In this work we present a new method, Path Database Guidance (PDG), which innovates on existing work in two ways. First, we use the database to compute a heuristic for determining which nodes of a search tree to expand, in contrast to prior work which generally pastes the (possibly transformed) queried path or uses it to bias a sampling distribution. We demonstrate that this makes our method more easily composable with other search methods by dynamically interleaving exploration according to a baseline algorithm with exploitation of the database guidance. Second, in contrast to other methods that treat the database as a single fixed prior, our database (and thus our queried heuristic) updates as we search the implicitly defined robot configuration space. We experimentally demonstrate the effectiveness of PDG in a variety of explicitly defined environment distributions in simulation.