 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUltrafast Sampling-based Kinodynamic Planning via Differential Flatness
Mar 17, 2026Motion planning under dynamics constraints, i.e., kinodynamic planning, enables safe robot operation by generating dynamically feasible trajectories that the robot can accurately track. For high-\dof robots such as manipulators, sampling-based motion planners are commonly used, especially for complex tasks in cluttered environments. However, enforcing constraints on robot dynamics in such planners requires solving either challenging two-point boundary value problems (BVPs) or propagating robot dynamics over time, both of which are computational bottlenecks that drastically increase planning times. Meanwhile, recent efforts have shown that sampling-based motion planners can generate plans in microseconds using parallelization, but are limited to geometric paths. This paper develops AkinoPDF, a fast parallelized sampling-based kinodynamic motion planning technique for a broad class of differentially flat robot systems, including manipulators, ground and aerial vehicles, and more. Differential flatness allows us to transform the motion planning problem from the original state space to a flat output space, where an analytical time-parameterized solution of the BVP and dynamics integration can be obtained. A trajectory in the flat output space is then converted back to a closed-form dynamically feasible trajectory in the original state space, enabling fast validation via ``single instruction, multiple data" parallelism. Our method is fast, exact, and compatible with any sampling-based motion planner. We extensively verify the effectiveness of our approach in both simulated benchmarks and real experiments with cluttered and dynamic environments, requiring mere microseconds to milliseconds of planning time.
Python Bindings for a Large C++ Robotics Library: The Case of OMPL
Mar 04, 2026Python bindings are a critical bridge between high-performance C++ libraries and the flexibility of Python, enabling rapid prototyping, reproducible experiments, and integration with simulation and learning frameworks in robotics research. Yet, generating bindings for large codebases is a tedious process that creates a heavy burden for a small group of maintainers. In this work, we investigate the use of Large Language Models (LLMs) to assist in generating nanobind wrappers, with human experts kept in the loop. Our workflow mirrors the structure of the C++ codebase, scaffolds empty wrapper files, and employs LLMs to fill in binding definitions. Experts then review and refine the generated code to ensure correctness, compatibility, and performance. Through a case study on a large C++ motion planning library, we document common failure modes, including mismanaging shared pointers, overloads, and trampolines, and show how in-context examples and careful prompt design improve reliability. Experiments demonstrate that the resulting bindings achieve runtime performance comparable to legacy solutions. Beyond this case study, our results provide general lessons for applying LLMs to binding generation in large-scale C++ projects.
Sampling-Based Motion Planning with Scene Graphs Under Perception Constraints
Mar 03, 2026It will be increasingly common for robots to operate in cluttered human-centered environments such as homes, workplaces, and hospitals, where the robot is often tasked to maintain perception constraints, such as monitoring people or multiple objects, for safety and reliability while executing its task. However, existing perception-aware approaches typically focus on low-degree-of-freedom (DoF) systems or only consider a single object in the context of high-DoF robots. This motivates us to consider the problem of perception-aware motion planning for high-DoF robots that accounts for multi-object monitoring constraints. We employ a scene graph representation of the environment, offering a great potential for incorporating long-horizon task and motion planning thanks to its rich semantic and spatial information. However, it does not capture perception-constrained information, such as the viewpoints the user prefers. To address these challenges, we propose MOPS-PRM, a roadmap-based motion planner, that integrates the perception cost of observing multiple objects or humans directly into motion planning for high-DoF robots. The perception cost is embedded to each object as part of a scene graph, and used to selectively sample configurations for roadmap construction, implicitly enforcing the perception constraints. Our method is extensively validated in both simulated and real-world experiments, achieving more than ~36% improvement in the average number of detected objects and ~17% better track rate against other perception-constrained baselines, with comparable planning times and path lengths.
TIDE: A Trace-Informed Depth-First Exploration for Planning with Temporally Extended Goals
Jan 17, 2026Task planning with temporally extended goals (TEGs) is a critical challenge in AI and robotics, enabling agents to achieve complex sequences of objectives over time rather than addressing isolated, immediate tasks. Linear Temporal Logic on finite traces (LTLf ) provides a robust formalism for encoding these temporal goals. Traditional LTLf task planning approaches often transform the temporal planning problem into a classical planning problem with reachability goals, which are then solved using off-the-shelf planners. However, these methods often lack informed heuristics to provide a guided search for temporal goals. We introduce TIDE (Trace-Informed Depth-first Exploration), a novel approach that addresses this limitation by decomposing a temporal problem into a sequence of smaller, manageable reach-avoid sub-problems, each solvable using an off-the-shelf planner. TIDE identifies and prioritizes promising automaton traces within the domain graph, using cost-driven heuristics to guide exploration. Its adaptive backtracking mechanism systematically recovers from failed plans by recalculating costs and penalizing infeasible transitions, ensuring completeness and efficiency. Experimental results demonstrate that TIDE achieves promising performance and is a valuable addition to the portfolio of planning methods for temporally extended goals.
Falsification of Autonomous Systems in Rich Environments
Dec 23, 2024Validating the behavior of autonomous Cyber-Physical Systems (CPS) and Artificial Intelligence (AI) agents, which rely on automated controllers, is an objective of great importance. In recent years, Neural-Network (NN) controllers have been demonstrating great promise. Unfortunately, such learned controllers are often not certified and can cause the system to suffer from unpredictable or unsafe behavior. To mitigate this issue, a great effort has been dedicated to automated verification of systems. Specifically, works in the category of ``black-box testing'' rely on repeated system simulations to find a falsifying counterexample of a system run that violates a specification. As running high-fidelity simulations is computationally demanding, the goal of falsification approaches is to minimize the simulation effort (NN inference queries) needed to return a falsifying example. This often proves to be a great challenge, especially when the tested controller is well-trained. This work contributes a novel falsification approach for autonomous systems under formal specification operating in uncertain environments. We are especially interested in CPS operating in rich, semantically-defined, open environments, which yield high-dimensional, simulation-dependent sensor observations. Our approach introduces a novel reformulation of the falsification problem as the problem of planning a trajectory for a ``meta-system,'' which wraps and encapsulates the examined system; we call this approach: meta-planning. This formulation can be solved with standard sampling-based motion-planning techniques (like RRT) and can gradually integrate domain knowledge to improve the search. We support the suggested approach with an experimental study on falsification of an obstacle-avoiding autonomous car with a NN controller, where meta-planning demonstrates superior performance over alternative approaches.
Nearest-Neighbourless Asymptotically Optimal Motion Planning with Fully Connected Informed Trees (FCIT*)
Nov 26, 2024Improving the performance of motion planning algorithms for high-degree-of-freedom robots usually requires reducing the cost or frequency of computationally expensive operations. Traditionally, and especially for asymptotically optimal sampling-based motion planners, the most expensive operations are local motion validation and querying the nearest neighbours of a configuration. Recent advances have significantly reduced the cost of motion validation by using single instruction/multiple data (SIMD) parallelism to improve solution times for satisficing motion planning problems. These advances have not yet been applied to asymptotically optimal motion planning. This paper presents Fully Connected Informed Trees (FCIT*), the first fully connected, informed, anytime almost-surely asymptotically optimal (ASAO) algorithm. FCIT* exploits the radically reduced cost of edge evaluation via SIMD parallelism to build and search fully connected graphs. This removes the need for nearest-neighbours structures, which are a dominant cost for many sampling-based motion planners, and allows it to find initial solutions faster than state-of-the-art ASAO (VAMP, OMPL) and satisficing (OMPL) algorithms on the MotionBenchMaker dataset while converging towards optimal plans in an anytime manner.
Scaling Long-Horizon Online POMDP Planning via Rapid State Space Sampling
Nov 11, 2024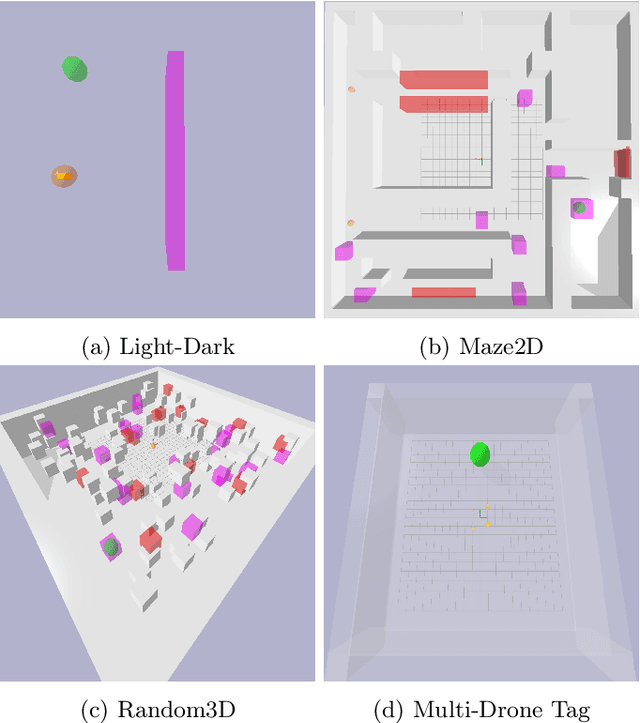
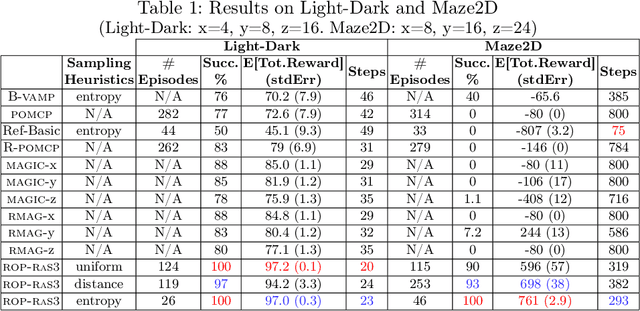
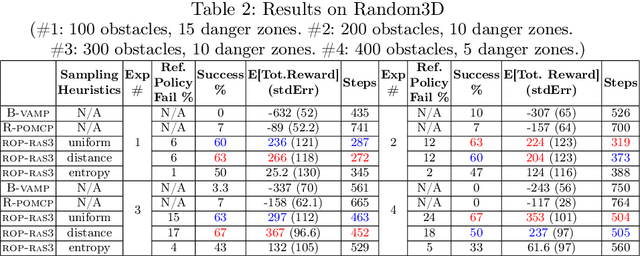
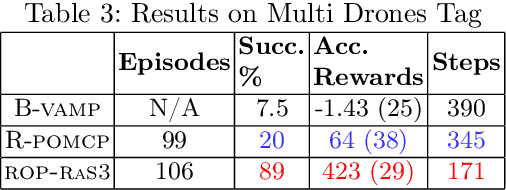
Partially Observable Markov Decision Processes (POMDPs) are a general and principled framework for motion planning under uncertainty. Despite tremendous improvement in the scalability of POMDP solvers, long-horizon POMDPs (e.g., $\geq15$ steps) remain difficult to solve. This paper proposes a new approximate online POMDP solver, called Reference-Based Online POMDP Planning via Rapid State Space Sampling (ROP-RaS3). ROP-RaS3 uses novel extremely fast sampling-based motion planning techniques to sample the state space and generate a diverse set of macro actions online which are then used to bias belief-space sampling and infer high-quality policies without requiring exhaustive enumeration of the action space -- a fundamental constraint for modern online POMDP solvers. ROP-RaS3 is evaluated on various long-horizon POMDPs, including on a problem with a planning horizon of more than 100 steps and a problem with a 15-dimensional state space that requires more than 20 look ahead steps. In all of these problems, ROP-RaS3 substantially outperforms other state-of-the-art methods by up to multiple folds.
CaStL: Constraints as Specifications through LLM Translation for Long-Horizon Task and Motion Planning
Oct 29, 2024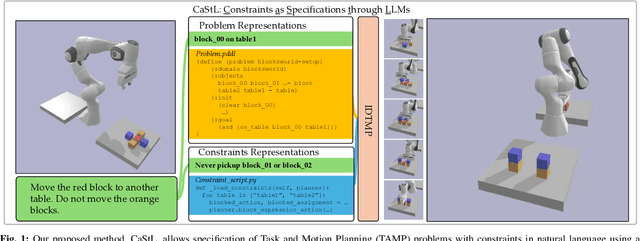
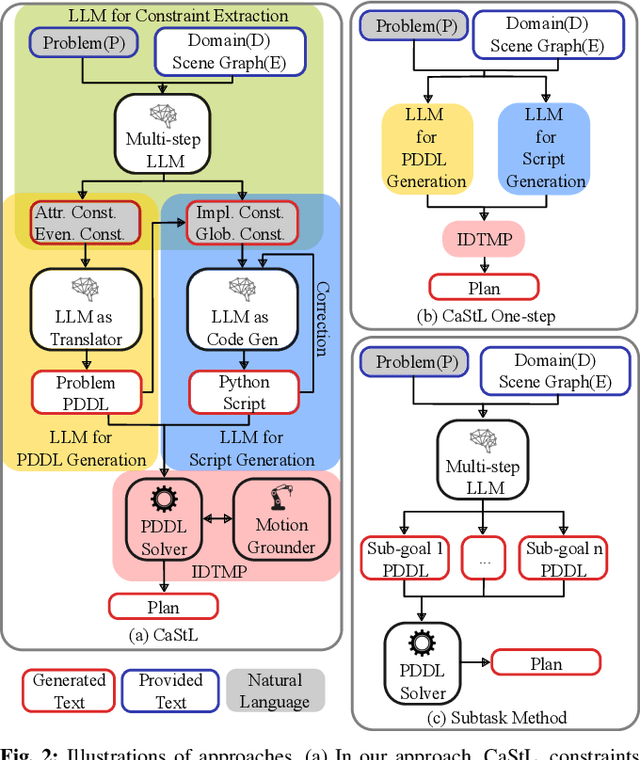
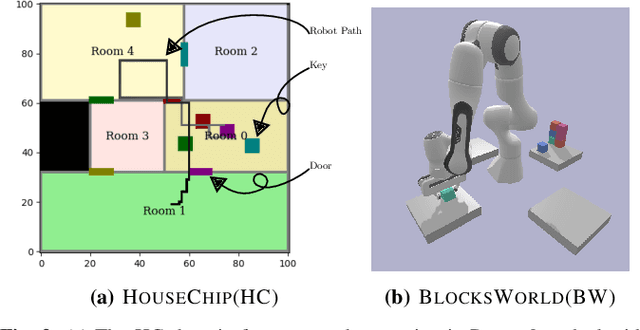
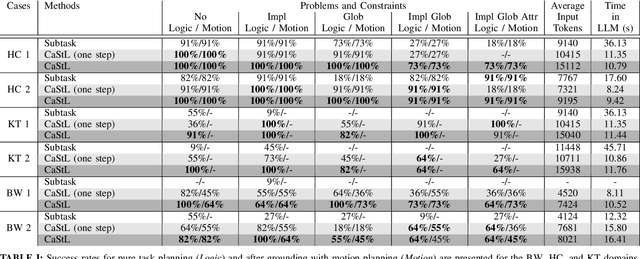
Large Language Models (LLMs) have demonstrated remarkable ability in long-horizon Task and Motion Planning (TAMP) by translating clear and straightforward natural language problems into formal specifications such as the Planning Domain Definition Language (PDDL). However, real-world problems are often ambiguous and involve many complex constraints. In this paper, we introduce Constraints as Specifications through LLMs (CaStL), a framework that identifies constraints such as goal conditions, action ordering, and action blocking from natural language in multiple stages. CaStL translates these constraints into PDDL and Python scripts, which are solved using an custom PDDL solver. Tested across three PDDL domains, CaStL significantly improves constraint handling and planning success rates from natural language specification in complex scenarios.
Encoding Reusable Multi-Robot Planning Strategies as Abstract Hypergraphs
Sep 16, 2024


Multi-Robot Task Planning (MR-TP) is the search for a discrete-action plan a team of robots should take to complete a task. The complexity of such problems scales exponentially with the number of robots and task complexity, making them challenging for online solution. To accelerate MR-TP over a system's lifetime, this work looks at combining two recent advances: (i) Decomposable State Space Hypergraph (DaSH), a novel hypergraph-based framework to efficiently model and solve MR-TP problems; and \mbox{(ii) learning-by-abstraction,} a technique that enables automatic extraction of generalizable planning strategies from individual planning experiences for later reuse. Specifically, we wish to extend this strategy-learning technique, originally designed for single-robot planning, to benefit multi-robot planning using hypergraph-based MR-TP.
Task and Motion Planning for Execution in the Real
Jun 05, 2024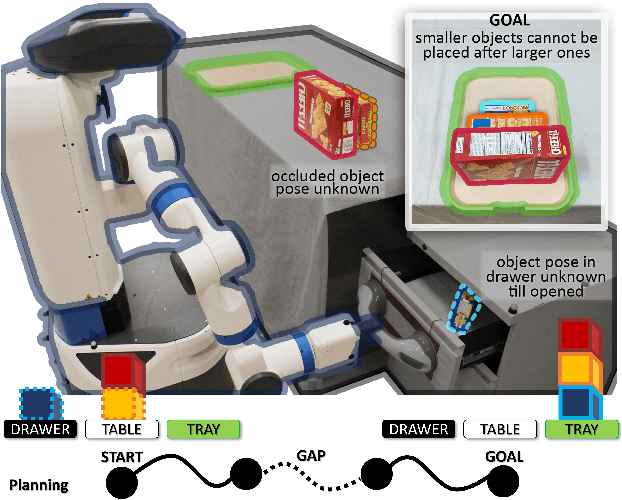
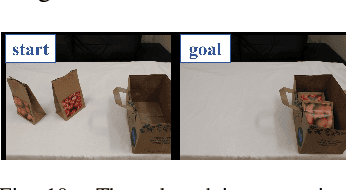

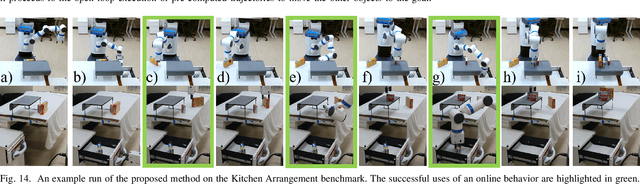
Task and motion planning represents a powerful set of hybrid planning methods that combine reasoning over discrete task domains and continuous motion generation. Traditional reasoning necessitates task domain models and enough information to ground actions to motion planning queries. Gaps in this knowledge often arise from sources like occlusion or imprecise modeling. This work generates task and motion plans that include actions cannot be fully grounded at planning time. During execution, such an action is handled by a provided human-designed or learned closed-loop behavior. Execution combines offline planned motions and online behaviors till reaching the task goal. Failures of behaviors are fed back as constraints to find new plans. Forty real-robot trials and motivating demonstrations are performed to evaluate the proposed framework and compare against state-of-the-art. Results show faster execution time, less number of actions, and more success in problems where diverse gaps arise. The experiment data is shared for researchers to simulate these settings. The work shows promise in expanding the applicable class of realistic partially grounded problems that robots can address.