 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUltrafast Sampling-based Kinodynamic Planning via Differential Flatness
Mar 17, 2026Motion planning under dynamics constraints, i.e., kinodynamic planning, enables safe robot operation by generating dynamically feasible trajectories that the robot can accurately track. For high-\dof robots such as manipulators, sampling-based motion planners are commonly used, especially for complex tasks in cluttered environments. However, enforcing constraints on robot dynamics in such planners requires solving either challenging two-point boundary value problems (BVPs) or propagating robot dynamics over time, both of which are computational bottlenecks that drastically increase planning times. Meanwhile, recent efforts have shown that sampling-based motion planners can generate plans in microseconds using parallelization, but are limited to geometric paths. This paper develops AkinoPDF, a fast parallelized sampling-based kinodynamic motion planning technique for a broad class of differentially flat robot systems, including manipulators, ground and aerial vehicles, and more. Differential flatness allows us to transform the motion planning problem from the original state space to a flat output space, where an analytical time-parameterized solution of the BVP and dynamics integration can be obtained. A trajectory in the flat output space is then converted back to a closed-form dynamically feasible trajectory in the original state space, enabling fast validation via ``single instruction, multiple data" parallelism. Our method is fast, exact, and compatible with any sampling-based motion planner. We extensively verify the effectiveness of our approach in both simulated benchmarks and real experiments with cluttered and dynamic environments, requiring mere microseconds to milliseconds of planning time.
AgenticLab: A Real-World Robot Agent Platform that Can See, Think, and Act
Feb 02, 2026Recent advances in large vision-language models (VLMs) have demonstrated generalizable open-vocabulary perception and reasoning, yet their real-robot manipulation capability remains unclear for long-horizon, closed-loop execution in unstructured, in-the-wild environments. Prior VLM-based manipulation pipelines are difficult to compare across different research groups' setups, and many evaluations rely on simulation, privileged state, or specially designed setups. We present AgenticLab, a model-agnostic robot agent platform and benchmark for open-world manipulation. AgenticLab provides a closed-loop agent pipeline for perception, task decomposition, online verification, and replanning. Using AgenticLab, we benchmark state-of-the-art VLM-based agents on real-robot tasks in unstructured environments. Our benchmark reveals several failure modes that offline vision-language tests (e.g., VQA and static image understanding) fail to capture, including breakdowns in multi-step grounding consistency, object grounding under occlusion and scene changes, and insufficient spatial reasoning for reliable manipulation. We will release the full hardware and software stack to support reproducible evaluation and accelerate research on general-purpose robot agents.
Differentiable Particle Optimization for Fast Sequential Manipulation
Oct 09, 2025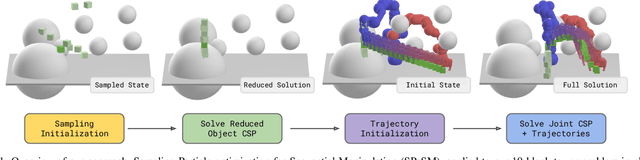
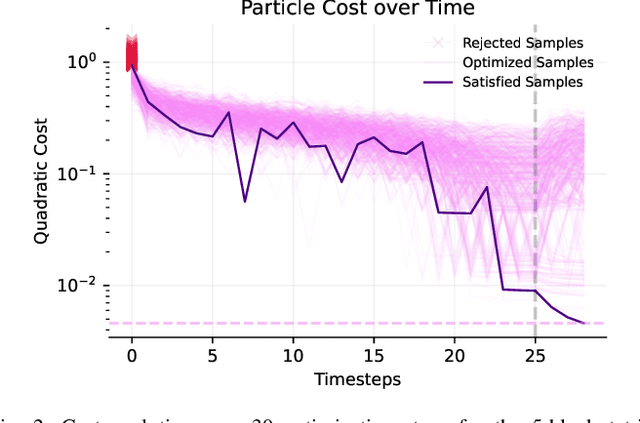
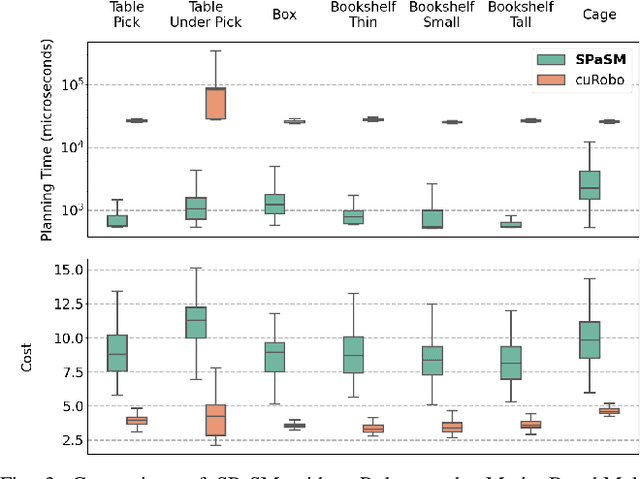
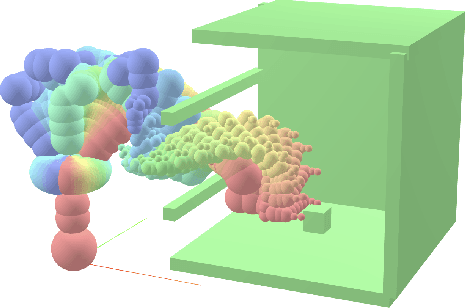
Sequential robot manipulation tasks require finding collision-free trajectories that satisfy geometric constraints across multiple object interactions in potentially high-dimensional configuration spaces. Solving these problems in real-time and at large scales has remained out of reach due to computational requirements. Recently, GPU-based acceleration has shown promising results, but prior methods achieve limited performance due to CPU-GPU data transfer overhead and complex logic that prevents full hardware utilization. To this end, we present SPaSM (Sampling Particle optimization for Sequential Manipulation), a fully GPU-parallelized framework that compiles constraint evaluation, sampling, and gradient-based optimization into optimized CUDA kernels for end-to-end trajectory optimization without CPU coordination. The method consists of a two-stage particle optimization strategy: first solving placement constraints through massively parallel sampling, then lifting solutions to full trajectory optimization in joint space. Unlike hierarchical approaches, SPaSM jointly optimizes object placements and robot trajectories to handle scenarios where motion feasibility constrains placement options. Experimental evaluation on challenging benchmarks demonstrates solution times in the realm of $\textbf{milliseconds}$ with a 100% success rate; a $4000\times$ speedup compared to existing approaches.
Parallel Simulation of Contact and Actuation for Soft Growing Robots
Sep 18, 2025Soft growing robots, commonly referred to as vine robots, have demonstrated remarkable ability to interact safely and robustly with unstructured and dynamic environments. It is therefore natural to exploit contact with the environment for planning and design optimization tasks. Previous research has focused on planning under contact for passively deforming robots with pre-formed bends. However, adding active steering to these soft growing robots is necessary for successful navigation in more complex environments. To this end, we develop a unified modeling framework that integrates vine robot growth, bending, actuation, and obstacle contact. We extend the beam moment model to include the effects of actuation on kinematics under growth and then use these models to develop a fast parallel simulation framework. We validate our model and simulator with real robot experiments. To showcase the capabilities of our framework, we apply our model in a design optimization task to find designs for vine robots navigating through cluttered environments, identifying designs that minimize the number of required actuators by exploiting environmental contacts. We show the robustness of the designs to environmental and manufacturing uncertainties. Finally, we fabricate an optimized design and successfully deploy it in an obstacle-rich environment.
Variational Shape Inference for Grasp Diffusion on SE(3)
Aug 24, 2025Grasp synthesis is a fundamental task in robotic manipulation which usually has multiple feasible solutions. Multimodal grasp synthesis seeks to generate diverse sets of stable grasps conditioned on object geometry, making the robust learning of geometric features crucial for success. To address this challenge, we propose a framework for learning multimodal grasp distributions that leverages variational shape inference to enhance robustness against shape noise and measurement sparsity. Our approach first trains a variational autoencoder for shape inference using implicit neural representations, and then uses these learned geometric features to guide a diffusion model for grasp synthesis on the SE(3) manifold. Additionally, we introduce a test-time grasp optimization technique that can be integrated as a plugin to further enhance grasping performance. Experimental results demonstrate that our shape inference for grasp synthesis formulation outperforms state-of-the-art multimodal grasp synthesis methods on the ACRONYM dataset by 6.3%, while demonstrating robustness to deterioration in point cloud density compared to other approaches. Furthermore, our trained model achieves zero-shot transfer to real-world manipulation of household objects, generating 34% more successful grasps than baselines despite measurement noise and point cloud calibration errors.
Underwater Multi-Robot Simulation and Motion Planning in Angler
Jun 07, 2025Deploying multi-robot systems in underwater environments is expensive and lengthy; testing algorithms and software in simulation improves development by decoupling software and hardware. However, this requires a simulation framework that closely resembles the real-world. Angler is an open-source framework that simulates low-level communication protocols for an onboard autopilot, such as ArduSub, providing a framework that is close to reality, but unfortunately lacking support for simulating multiple robots. We present an extension to Angler that supports multi-robot simulation and motion planning. Our extension has a modular architecture that creates non-conflicting communication channels between Gazebo, ArduSub Software-in-the-Loop (SITL), and MAVROS to operate multiple robots simultaneously in the same environment. Our multi-robot motion planning module interfaces with cascaded controllers via a JointTrajectory controller in ROS~2. We also provide an integration with the Open Motion Planning Library (OMPL), a collision avoidance module, and tools for procedural environment generation. Our work enables the development and benchmarking of underwater multi-robot motion planning in dynamic environments.
AORRTC: Almost-Surely Asymptotically Optimal Planning with RRT-Connect
May 15, 2025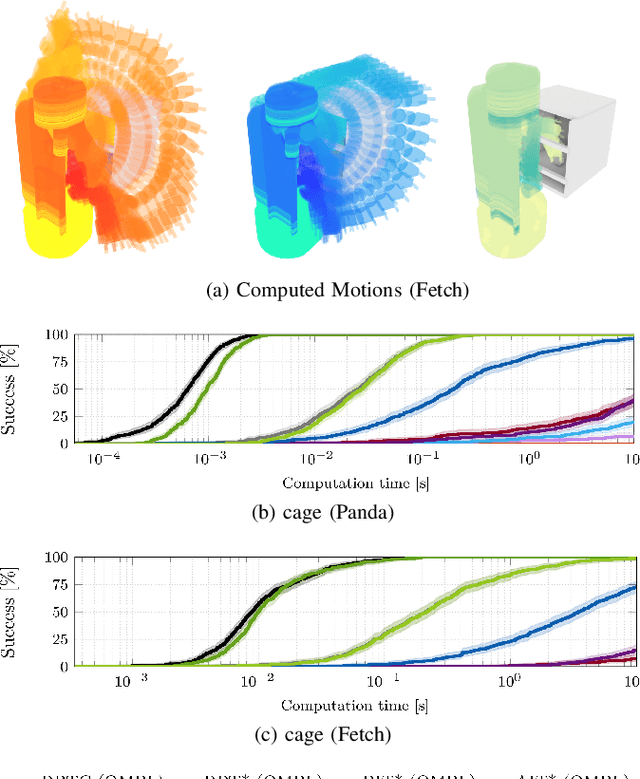
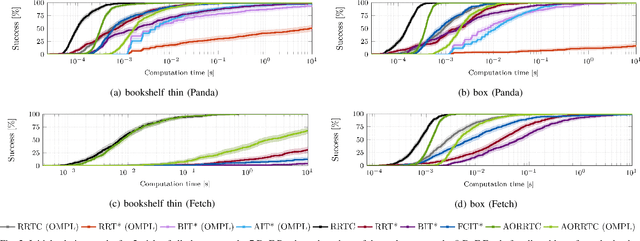
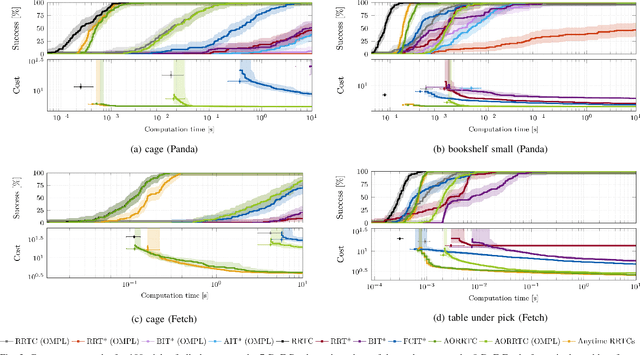
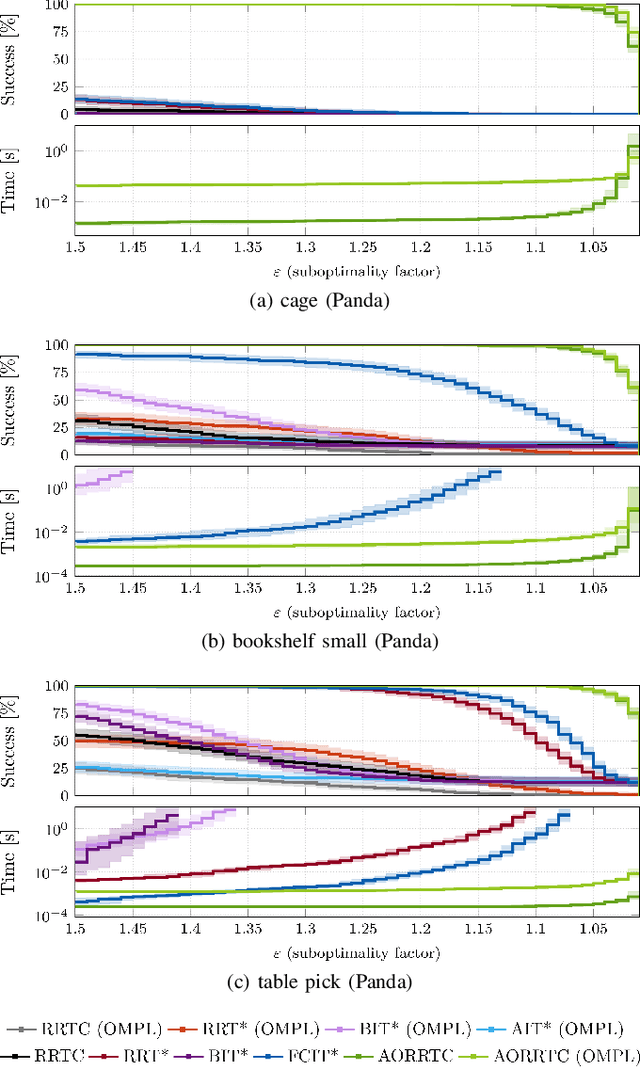
Finding high-quality solutions quickly is an important objective in motion planning. This is especially true for high-degree-of-freedom robots. Satisficing planners have traditionally found feasible solutions quickly but provide no guarantees on their optimality, while almost-surely asymptotically optimal (a.s.a.o.) planners have probabilistic guarantees on their convergence towards an optimal solution but are more computationally expensive. This paper uses the AO-x meta-algorithm to extend the satisficing RRT-Connect planner to optimal planning. The resulting Asymptotically Optimal RRT-Connect (AORRTC) finds initial solutions in similar times as RRT-Connect and uses any additional planning time to converge towards the optimal solution in an anytime manner. It is proven to be probabilistically complete and a.s.a.o. AORRTC was tested with the Panda (7 DoF) and Fetch (8 DoF) robotic arms on the MotionBenchMaker dataset. These experiments show that AORRTC finds initial solutions as fast as RRT-Connect and faster than the tested state-of-the-art a.s.a.o. algorithms while converging to better solutions faster. AORRTC finds solutions to difficult high-DoF planning problems in milliseconds where the other a.s.a.o. planners could not consistently find solutions in seconds. This performance was demonstrated both with and without single instruction/multiple data (SIMD) acceleration.
Evaluating Machine Learning Approaches for ASCII Art Generation
Mar 18, 2025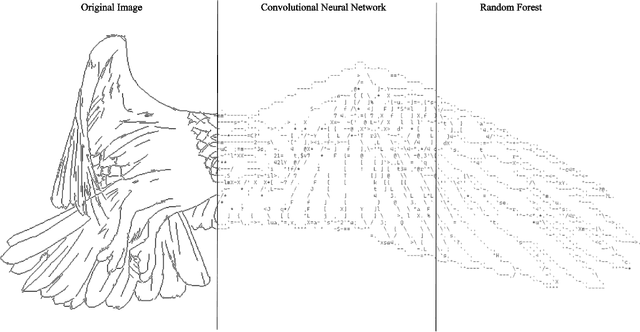
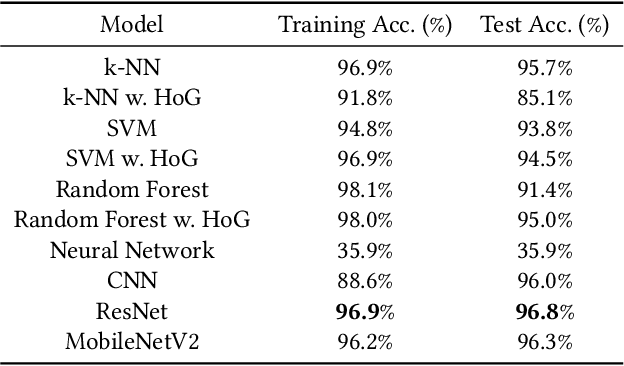
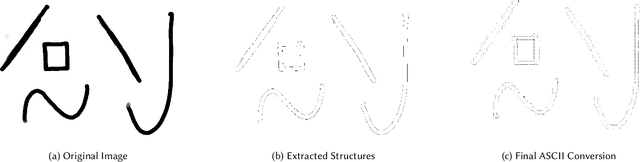
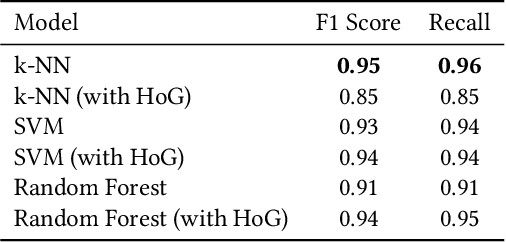
Generating structured ASCII art using computational techniques demands a careful interplay between aesthetic representation and computational precision, requiring models that can effectively translate visual information into symbolic text characters. Although Convolutional Neural Networks (CNNs) have shown promise in this domain, the comparative performance of deep learning architectures and classical machine learning methods remains unexplored. This paper explores the application of contemporary ML and DL methods to generate structured ASCII art, focusing on three key criteria: fidelity, character classification accuracy, and output quality. We investigate deep learning architectures, including Multilayer Perceptrons (MLPs), ResNet, and MobileNetV2, alongside classical approaches such as Random Forests, Support Vector Machines (SVMs) and k-Nearest Neighbors (k-NN), trained on an augmented synthetic dataset of ASCII characters. Our results show that complex neural network architectures often fall short in producing high-quality ASCII art, whereas classical machine learning classifiers, despite their simplicity, achieve performance similar to CNNs. Our findings highlight the strength of classical methods in bridging model simplicity with output quality, offering new insights into ASCII art synthesis and machine learning on image data with low dimensionality.
Foam: A Tool for Spherical Approximation of Robot Geometry
Mar 17, 2025Many applications in robotics require primitive spherical geometry, especially in cases where efficient distance queries are necessary. Manual creation of spherical models is time-consuming and prone to errors. This paper presents Foam, a tool to generate spherical approximations of robot geometry from an input Universal Robot Description Format (URDF) file. Foam provides a robust preprocessing pipeline to handle mesh defects and a number of configuration parameters to control the level and approximation of the spherization, and generates an output URDF with collision geometry specified only by spheres. We demonstrate Foam on a number of standard robot models on common tasks, and demonstrate improved collision checking and distance query performance with only a minor loss in fidelity compared to the true collision geometry. We release our tool as an open source Python library and containerized command-line application to facilitate adoption across the robotics community.
pRRTC: GPU-Parallel RRT-Connect for Fast, Consistent, and Low-Cost Motion Planning
Mar 09, 2025



Sampling-based motion planning algorithms, like the Rapidly-Exploring Random Tree (RRT) and its widely used variant, RRT-Connect, provide efficient solutions for high-dimensional planning problems faced by real-world robots. However, these methods remain computationally intensive, particularly in complex environments that require many collision checks. As such, to improve performance, recent efforts have explored parallelizing specific components of RRT, such as collision checking or running multiple planners independently, but no prior work has integrated parallelism at multiple levels of the algorithm for robotic manipulation. In this work, we present pRRTC, a GPU-accelerated implementation of RRT-Connect that achieves parallelism across the entire algorithm through multithreaded expansion and connection, SIMT-optimized collision checking, and hierarchical parallelism optimization, improving efficiency, consistency, and initial solution cost. We evaluate the effectiveness of pRRTC on the MotionBenchMaker dataset using robots with 7, 8, and 14 degrees-of-freedom, demonstrating up to 6x average speedup on constrained reaching tasks at high collision checking resolution compared to state-of-the-art. pRRTC also demonstrates a 5x reduction in solution time variance and 1.5x improvement in initial path costs compared to state-of-the-art motion planners in complex environments across all robots.