 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderwater Multi-Robot Simulation and Motion Planning in Angler
Jun 07, 2025Deploying multi-robot systems in underwater environments is expensive and lengthy; testing algorithms and software in simulation improves development by decoupling software and hardware. However, this requires a simulation framework that closely resembles the real-world. Angler is an open-source framework that simulates low-level communication protocols for an onboard autopilot, such as ArduSub, providing a framework that is close to reality, but unfortunately lacking support for simulating multiple robots. We present an extension to Angler that supports multi-robot simulation and motion planning. Our extension has a modular architecture that creates non-conflicting communication channels between Gazebo, ArduSub Software-in-the-Loop (SITL), and MAVROS to operate multiple robots simultaneously in the same environment. Our multi-robot motion planning module interfaces with cascaded controllers via a JointTrajectory controller in ROS~2. We also provide an integration with the Open Motion Planning Library (OMPL), a collision avoidance module, and tools for procedural environment generation. Our work enables the development and benchmarking of underwater multi-robot motion planning in dynamic environments.
Constrained Nonlinear Kaczmarz Projection on Intersections of Manifolds for Coordinated Multi-Robot Mobile Manipulation
Oct 29, 2024



Cooperative manipulation tasks impose various structure-, task-, and robot-specific constraints on mobile manipulators. However, current methods struggle to model and solve these myriad constraints simultaneously. We propose a twofold solution: first, we model constraints as a family of manifolds amenable to simultaneous solving. Second, we introduce the constrained nonlinear Kaczmarz (cNKZ) projection technique to produce constraint-satisfying solutions. Experiments show that cNKZ dramatically outperforms baseline approaches, which cannot find solutions at all. We integrate cNKZ with a sampling-based motion planning algorithm to generate complex, coordinated motions for 3 to 6 mobile manipulators (18--36 DoF), with cNKZ solving up to 80 nonlinear constraints simultaneously and achieving up to a 92% success rate in cluttered environments. We also demonstrate our approach on hardware using three Turtlebot3 Waffle Pi robots with OpenMANIPULATOR-X arms.
Stochastic Assignment for Deploying Multiple Marsupial Robots
Oct 19, 2021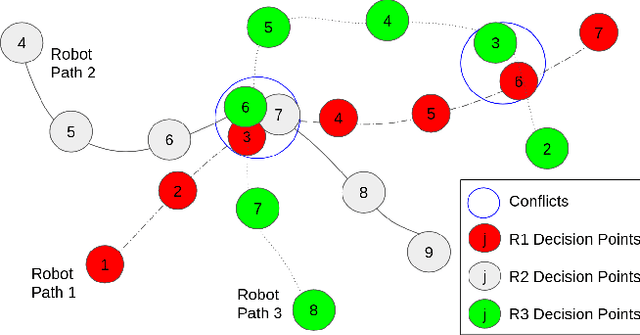
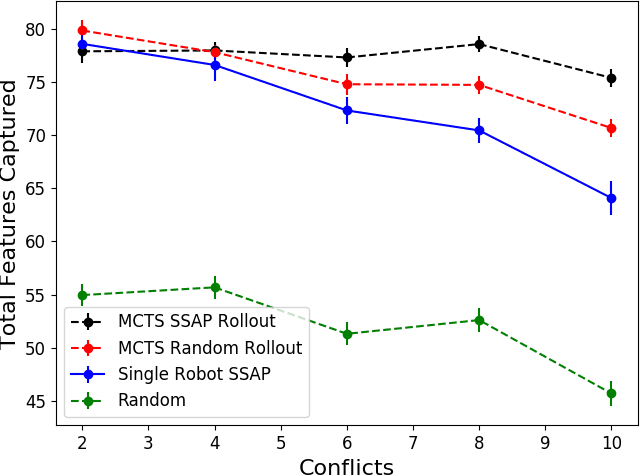
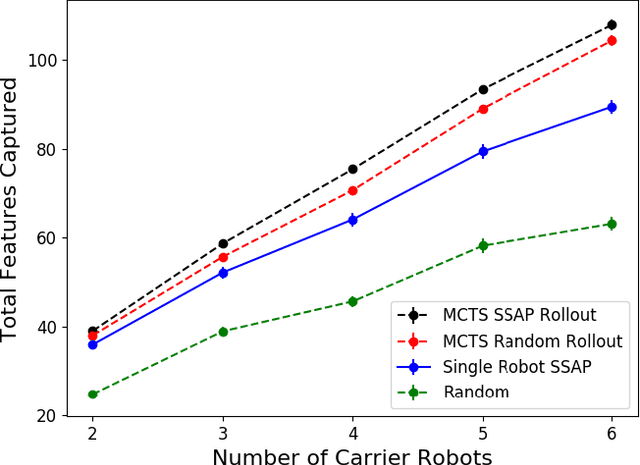
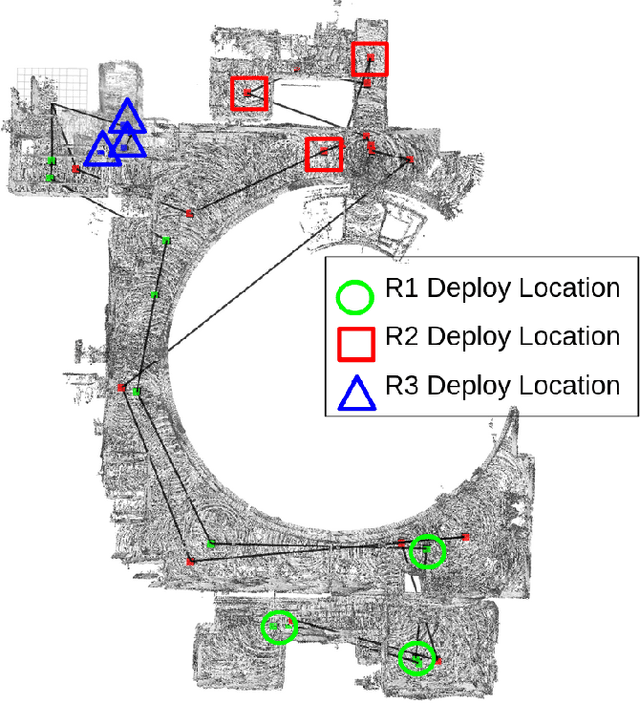
Marsupial robot teams consist of carrier robots that transport and deploy multiple passenger robots, such as a team of ground robots that carry and deploy multiple aerial robots, to rapidly explore complex environments. We specifically address the problem of planning the deployment times and locations of the carrier robots to best meet the objectives of a mission while reasoning over uncertain future observations and rewards. While prior work proposed optimal, polynomial-time solutions to single-carrier robot systems, the multiple-carrier robot deployment problem is fundamentally harder as it requires addressing conflicts and dependencies between deployments of multiple passenger robots. We propose a centralized heuristic search algorithm for the multiple-carrier robot deployment problem that combines Monte Carlo Tree Search with a dynamic programming-based solution to the Sequential Stochastic Assignment Problem as a rollout action-selection policy. Our results with both procedurally-generated data and data drawn from the DARPA Subterranean Challenge Urban Circuit show the viability of our approach and substantial exploration performance improvements over alternative algorithms.
Optimal Sequential Stochastic Deployment of Multiple Passenger Robots
Oct 19, 2021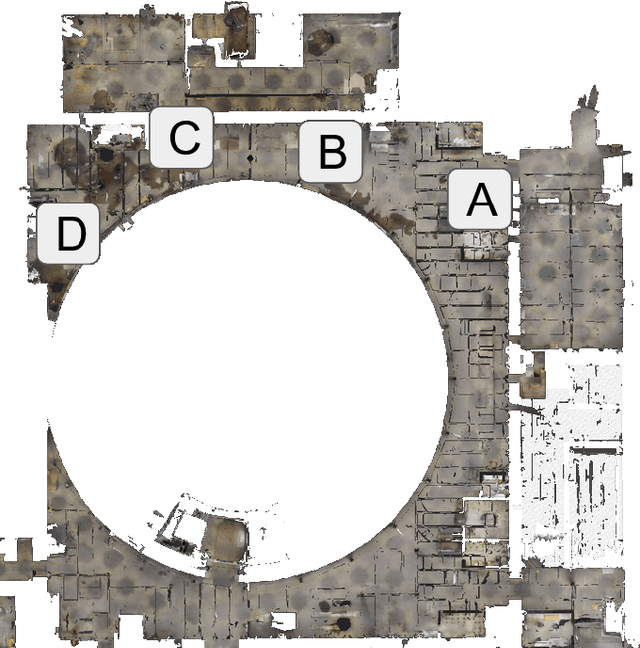
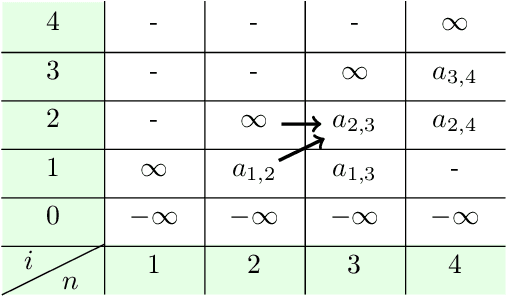
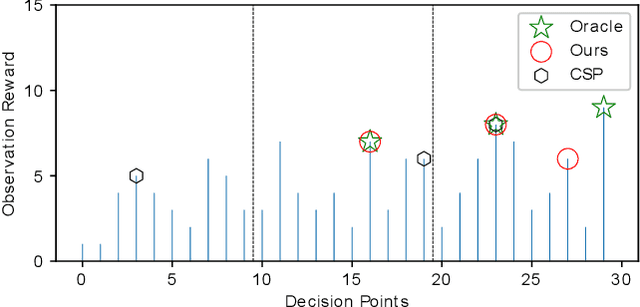
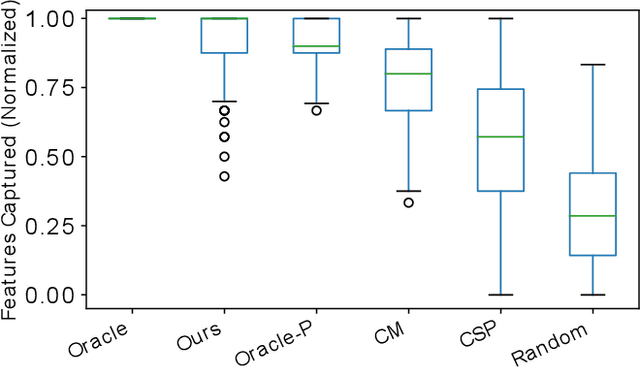
We present a new algorithm for deploying passenger robots in marsupial robot systems. A marsupial robot system consists of a carrier robot (e.g., a ground vehicle), which is highly capable and has a long mission duration, and at least one passenger robot (e.g., a short-duration aerial vehicle) transported by the carrier. We optimize the performance of passenger robot deployment by proposing an algorithm that reasons over uncertainty by exploiting information about the prior probability distribution of features of interest in the environment. Our algorithm is formulated as a solution to a sequential stochastic assignment problem (SSAP). The key feature of the algorithm is a recurrence relationship that defines a set of observation thresholds that are used to decide when to deploy passenger robots. Our algorithm computes the optimal policy in $O(NR)$ time, where $N$ is the number of deployment decision points and $R$ is the number of passenger robots to be deployed. We conducted drone deployment exploration experiments on real-world data from the DARPA Subterranean challenge to test the SSAP algorithm. Our results show that our deployment algorithm outperforms other competing algorithms, such as the classic secretary approach and baseline partitioning methods, and is comparable to an offline oracle algorithm.
Active Classification: Theory and Application to Underwater Inspection
Jun 29, 2011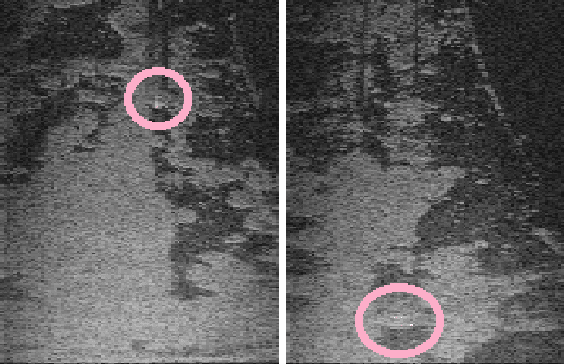

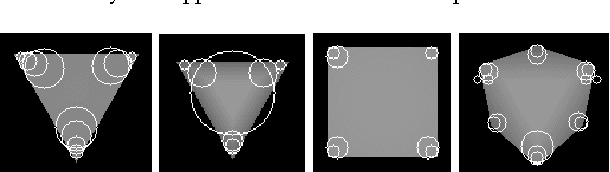

We discuss the problem in which an autonomous vehicle must classify an object based on multiple views. We focus on the active classification setting, where the vehicle controls which views to select to best perform the classification. The problem is formulated as an extension to Bayesian active learning, and we show connections to recent theoretical guarantees in this area. We formally analyze the benefit of acting adaptively as new information becomes available. The analysis leads to a probabilistic algorithm for determining the best views to observe based on information theoretic costs. We validate our approach in two ways, both related to underwater inspection: 3D polyhedra recognition in synthetic depth maps and ship hull inspection with imaging sonar. These tasks encompass both the planning and recognition aspects of the active classification problem. The results demonstrate that actively planning for informative views can reduce the number of necessary views by up to 80% when compared to passive methods.