 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePRoID: Predicted Rate of Information Delivery in Multi-Robot Exploration and Relaying
Apr 12, 2026We address Multi-Robot Exploration and Relaying (MRER): a team of robots must explore an unknown environment and deliver acquired information to a fixed base station within a mission time limit. The central challenge is deciding when each robot should stop exploring and relay: this depends on what the robot is likely to find ahead, what information it uniquely holds, and whether immediate or future delivery is more valuable. Prior approaches either ignore the reporting requirement entirely or rely on fixed-schedule relay strategies that cannot adapt to environment structure, team composition, or mission progress. We introduce PRoID (Predicted Rate of Information Delivery), a relay criterion that uses learned map prediction to estimate each robot's future information gain along its planned path, accounting for what teammates are already relaying. PRoID triggers relay when immediate return yields higher information delivery per unit time. We further propose PRoID-Safe, a failure-aware extension that incorporates robot survival probability into the relay criterion, naturally biasing decisions toward earlier relay as failure risk grows. We evaluate on real-world indoor floor plan datasets and show that PRoID and PRoID-Safe outperform fixed-schedule baselines, with stronger relative gains in failure scenarios.
Multi-Robot Multi-Room Exploration with Geometric Cue Extraction and Spherical Decomposition
Jul 27, 2023



This work proposes an autonomous multi-robot exploration pipeline that coordinates the behaviors of robots in an indoor environment composed of multiple rooms. Contrary to simple frontier-based exploration approaches, we aim to enable robots to methodically explore and observe an unknown set of rooms in a structured building, keeping track of which rooms are already explored and sharing this information among robots to coordinate their behaviors in a distributed manner. To this end, we propose (1) a geometric cue extraction method that processes 3D map point cloud data and detects the locations of potential cues such as doors and rooms, (2) a spherical decomposition for open spaces used for target assignment. Using these two components, our pipeline effectively assigns tasks among robots, and enables a methodical exploration of rooms. We evaluate the performance of our pipeline using a team of up to 3 aerial robots, and show that our method outperforms the baseline by 36.6% in simulation and 26.4% in real-world experiments.
Stochastic Assignment for Deploying Multiple Marsupial Robots
Oct 19, 2021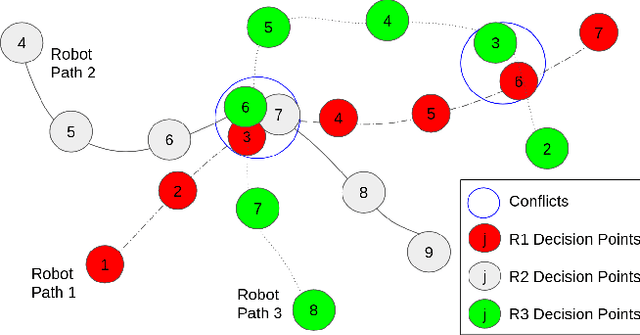
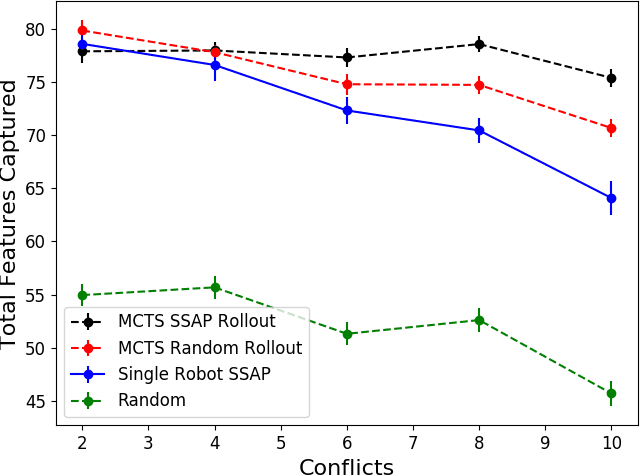
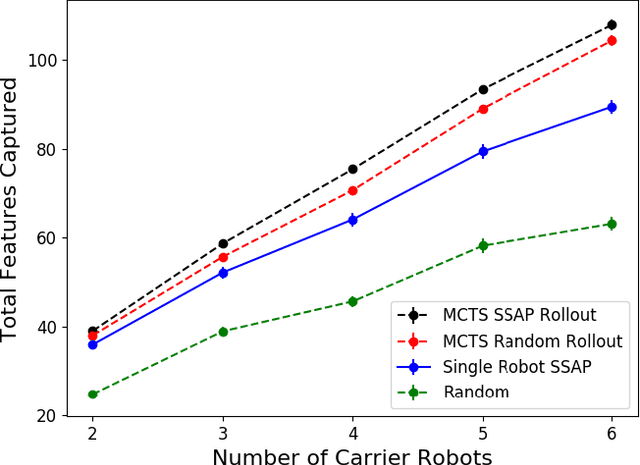
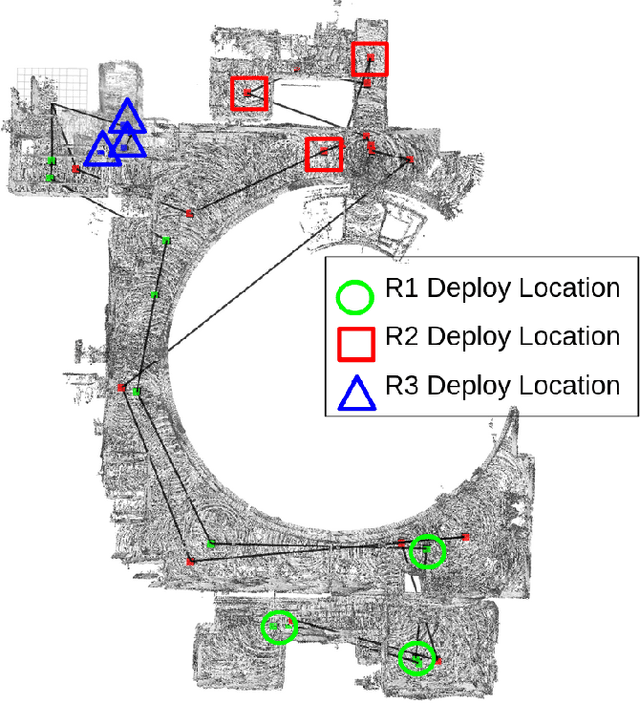
Marsupial robot teams consist of carrier robots that transport and deploy multiple passenger robots, such as a team of ground robots that carry and deploy multiple aerial robots, to rapidly explore complex environments. We specifically address the problem of planning the deployment times and locations of the carrier robots to best meet the objectives of a mission while reasoning over uncertain future observations and rewards. While prior work proposed optimal, polynomial-time solutions to single-carrier robot systems, the multiple-carrier robot deployment problem is fundamentally harder as it requires addressing conflicts and dependencies between deployments of multiple passenger robots. We propose a centralized heuristic search algorithm for the multiple-carrier robot deployment problem that combines Monte Carlo Tree Search with a dynamic programming-based solution to the Sequential Stochastic Assignment Problem as a rollout action-selection policy. Our results with both procedurally-generated data and data drawn from the DARPA Subterranean Challenge Urban Circuit show the viability of our approach and substantial exploration performance improvements over alternative algorithms.
Optimal Sequential Stochastic Deployment of Multiple Passenger Robots
Oct 19, 2021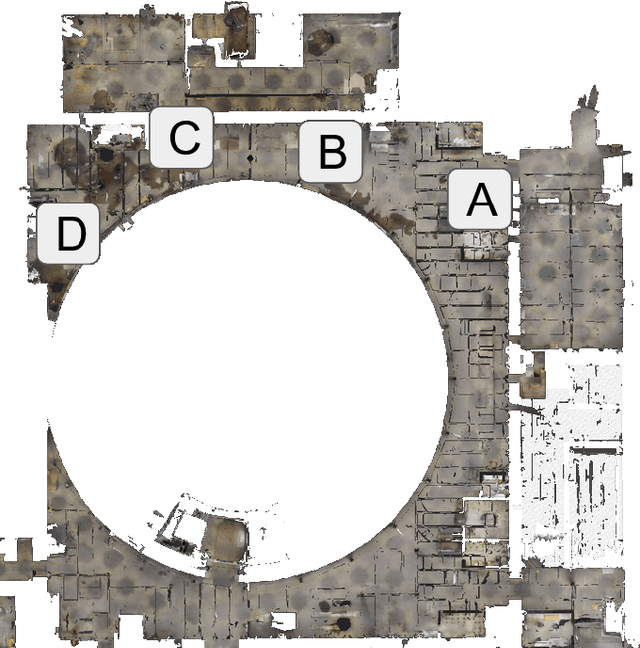
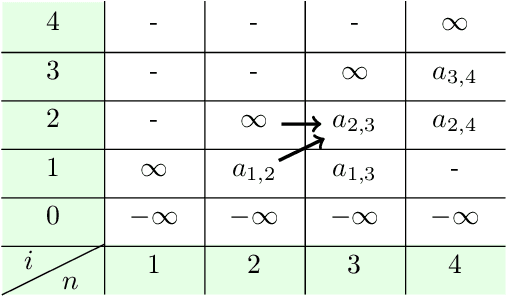
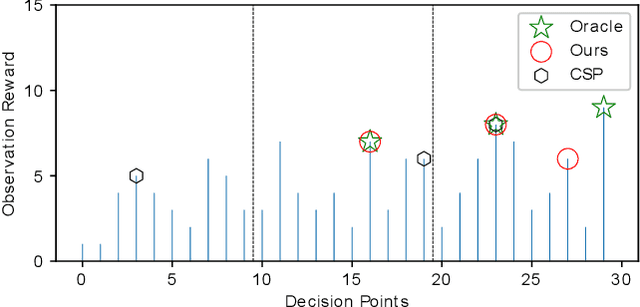
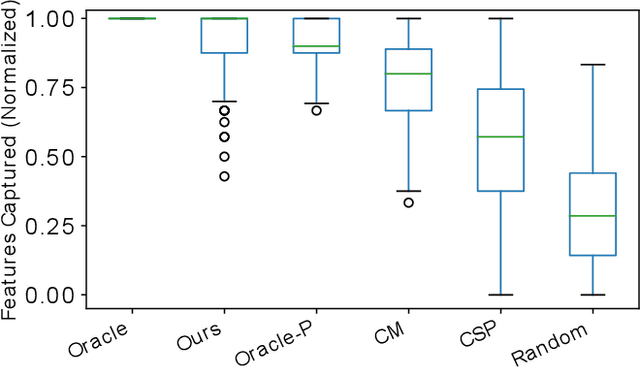
We present a new algorithm for deploying passenger robots in marsupial robot systems. A marsupial robot system consists of a carrier robot (e.g., a ground vehicle), which is highly capable and has a long mission duration, and at least one passenger robot (e.g., a short-duration aerial vehicle) transported by the carrier. We optimize the performance of passenger robot deployment by proposing an algorithm that reasons over uncertainty by exploiting information about the prior probability distribution of features of interest in the environment. Our algorithm is formulated as a solution to a sequential stochastic assignment problem (SSAP). The key feature of the algorithm is a recurrence relationship that defines a set of observation thresholds that are used to decide when to deploy passenger robots. Our algorithm computes the optimal policy in $O(NR)$ time, where $N$ is the number of deployment decision points and $R$ is the number of passenger robots to be deployed. We conducted drone deployment exploration experiments on real-world data from the DARPA Subterranean challenge to test the SSAP algorithm. Our results show that our deployment algorithm outperforms other competing algorithms, such as the classic secretary approach and baseline partitioning methods, and is comparable to an offline oracle algorithm.