 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Robot Multi-Room Exploration with Geometric Cue Extraction and Spherical Decomposition
Jul 27, 2023



This work proposes an autonomous multi-robot exploration pipeline that coordinates the behaviors of robots in an indoor environment composed of multiple rooms. Contrary to simple frontier-based exploration approaches, we aim to enable robots to methodically explore and observe an unknown set of rooms in a structured building, keeping track of which rooms are already explored and sharing this information among robots to coordinate their behaviors in a distributed manner. To this end, we propose (1) a geometric cue extraction method that processes 3D map point cloud data and detects the locations of potential cues such as doors and rooms, (2) a spherical decomposition for open spaces used for target assignment. Using these two components, our pipeline effectively assigns tasks among robots, and enables a methodical exploration of rooms. We evaluate the performance of our pipeline using a team of up to 3 aerial robots, and show that our method outperforms the baseline by 36.6% in simulation and 26.4% in real-world experiments.
Pegasus Simulator: An Isaac Sim Framework for Multiple Aerial Vehicles Simulation
Jul 11, 2023Developing and testing novel control and motion planning algorithms for aerial vehicles can be a challenging task, with the robotics community relying more than ever on 3D simulation technologies to evaluate the performance of new algorithms in a variety of conditions and environments. In this work, we introduce the Pegasus Simulator, a modular framework implemented as an NVIDIA Isaac Sim extension that enables real-time simulation of multiple multirotor vehicles in photo-realistic environments, while providing out-of-the-box integration with the widely adopted PX4-Autopilot and ROS2 through its modular implementation and intuitive graphical user interface. To demonstrate some of its capabilities, a nonlinear controller was implemented and simulation results for two drones performing aggressive flight maneuvers are presented. Code and documentation for this framework are also provided as supplementary material.
Learning and Transferring Value Function for Robot Exploration in Subterranean Environments
Apr 07, 2022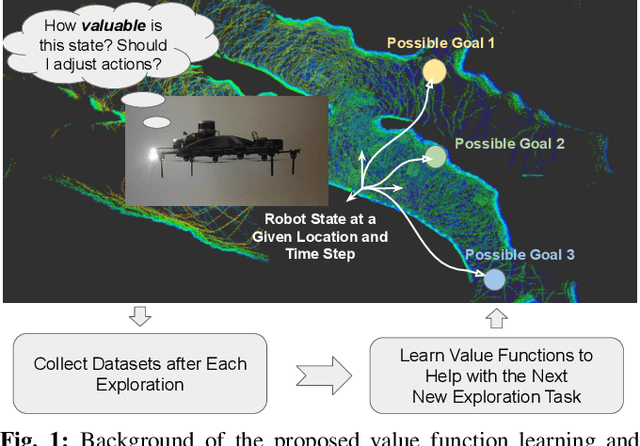
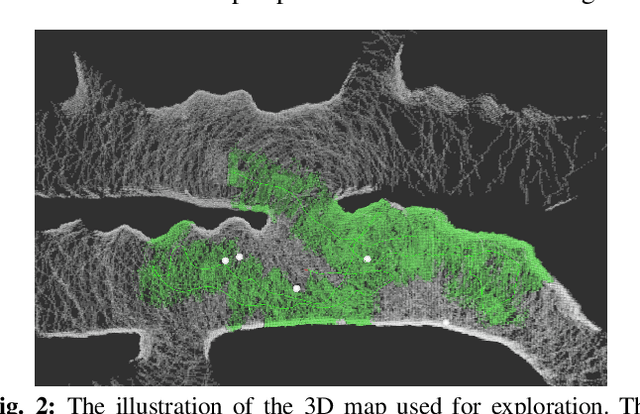
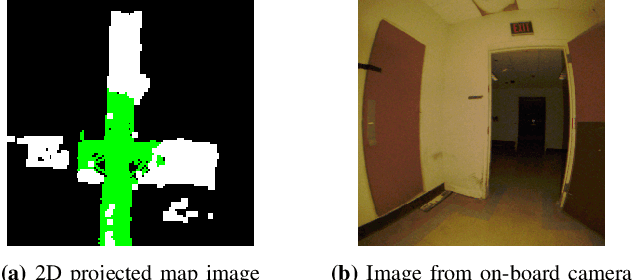
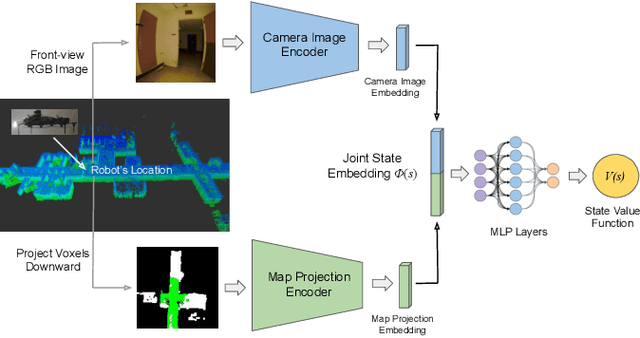
In traditional robot exploration methods, the robot usually does not have prior biases about the environment it is exploring. Thus the robot assigns equal importance to the goals which leads to insufficient exploration efficiency. Alternative, often a hand-tuned policy is used to tweak the value of goals. In this paper, we present a method to learn how "good" some states are, measured by the state value function, to provide a hint for the robot to make exploration decisions. We propose to learn state value functions from previous offline collected datasets and then transfer and improve the value function during testing in a new environment. Moreover, the environments usually have very few and even no extrinsic reward or feedback for the robot. Therefore in this work, we also tackle the problem of sparse extrinsic rewards from the environments. We design several intrinsic rewards to encourage the robot to obtain more information during exploration. These reward functions then become the building blocks of the state value functions. We test our method on challenging subterranean and urban environments. To the best of our knowledge, this work for the first time demonstrates value function prediction with previous collected datasets to help exploration in challenging subterranean environments.
Graph-Based Topological Exploration Planning in Large-Scale 3D Environments
Mar 31, 2021


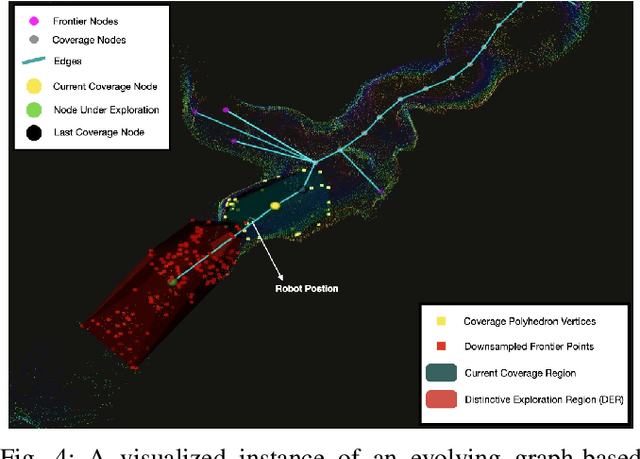
Currently, state-of-the-art exploration methods maintain high-resolution map representations in order to optimize exploration goals in each step that maximizes information gain. However, during exploring, those "optimal" selections could quickly become obsolete due to the influx of new information, especially in large-scale environments, and result in high-frequency re-planning that hinders the overall exploration efficiency. In this paper, we propose a graph-based topological planning framework, building a sparse topological map in three-dimensional (3D) space to guide exploration steps with high-level intents so as to render consistent exploration maneuvers. Specifically, this work presents a novel method to estimate 3D space's geometry with convex polyhedrons. Then, the geometry information is utilized to group space into distinctive regions. And those regions are added as nodes into the topological map, directing the exploration process. We compared our method with the state-of-the-art in simulated environments. The proposed method achieves higher space coverage and outperforms exploration efficiency by more than 40% during experiments. Finally, a field experiment was conducted to further evaluate the applicability of our method to empower efficient and robust exploration in real-world environments.
A Stereo Algorithm for Thin Obstacles and Reflective Objects
Oct 03, 2019


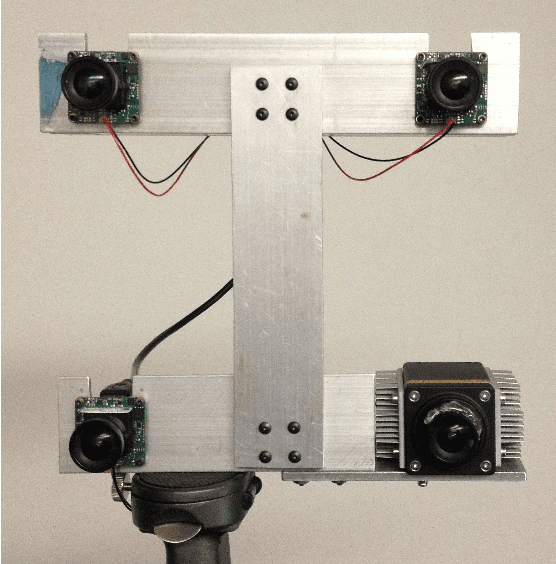
Stereo cameras are a popular choice for obstacle avoidance for outdoor lighweight, low-cost robotics applications. However, they are unable to sense thin and reflective objects well. Currently, many algorithms are tuned to perform well on indoor scenes like the Middlebury dataset. When navigating outdoors, reflective objects, like windows and glass, and thin obstacles, like wires, are not well handled by most stereo disparity algorithms. Reflections, repeating patterns and objects parallel to the cameras' baseline causes mismatches between image pairs which leads to bad disparity estimates. Thin obstacles are difficult for many sliding window based disparity methods to detect because they do not take up large portions of the pixels in the sliding window. We use a trinocular camera setup and micropolarizer camera capable of detecting reflective objects to overcome these issues. We present a hierarchical disparity algorithm that reduces noise, separately identify wires using semantic object triangulation in three images, and use information about the polarization of light to estimate the disparity of reflective objects. We evaluate our approach on outdoor data that we collected. Our method contained an average of 9.27% of bad pixels compared to a typical stereo algorithm's 18.4% of bad pixels in scenes containing reflective objects. Our trinocular and semantic wire disparity methods detected 53% of wire pixels, whereas a typical two camera stereo algorithm detected 5%.