 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEquivariant Filter for Relative Attitude and Target Angular Velocity Estimation
Jun 06, 2025



Accurate estimation of the relative attitude and angular velocity between two rigid bodies is fundamental in aerospace applications such as spacecraft rendezvous and docking. In these scenarios, a chaser vehicle must determine the orientation and angular velocity of a target object using onboard sensors. This work addresses the challenge of designing an Equivariant Filter (EqF) that can reliably estimate both the relative attitude and the target angular velocity using noisy observations of two known, non-collinear vectors fixed in the target frame. To derive the EqF, a symmetry for the system is proposed and an equivariant lift onto the symmetry group is calculated. Observability and convergence properties are analyzed. Simulations demonstrate the filter's performance, with Monte Carlo runs yielding statistically significant results. The impact of low-rate measurements is also examined and a strategy to mitigate this effect is proposed. Experimental results, using fiducial markers and both conventional and event cameras for measurement acquisition, further validate the approach, confirming its effectiveness in a realistic setting.
Pegasus Simulator: An Isaac Sim Framework for Multiple Aerial Vehicles Simulation
Jul 11, 2023


Developing and testing novel control and motion planning algorithms for aerial vehicles can be a challenging task, with the robotics community relying more than ever on 3D simulation technologies to evaluate the performance of new algorithms in a variety of conditions and environments. In this work, we introduce the Pegasus Simulator, a modular framework implemented as an NVIDIA Isaac Sim extension that enables real-time simulation of multiple multirotor vehicles in photo-realistic environments, while providing out-of-the-box integration with the widely adopted PX4-Autopilot and ROS2 through its modular implementation and intuitive graphical user interface. To demonstrate some of its capabilities, a nonlinear controller was implemented and simulation results for two drones performing aggressive flight maneuvers are presented. Code and documentation for this framework are also provided as supplementary material.
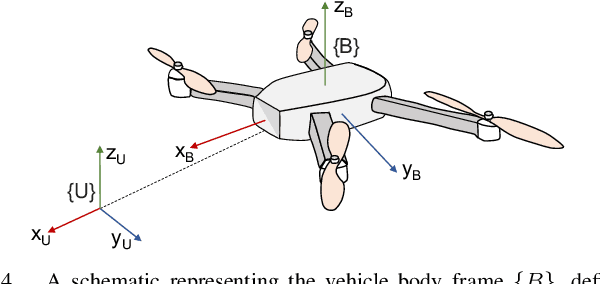
Optimal Trajectory Planning for Cinematography with Multiple Unmanned Aerial Vehicles
Sep 09, 2020
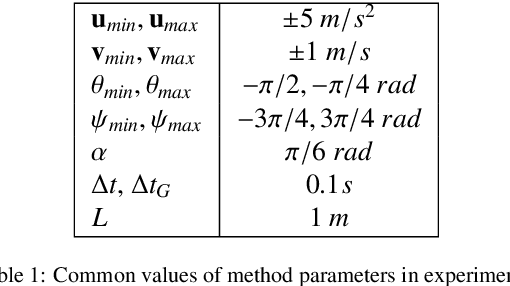
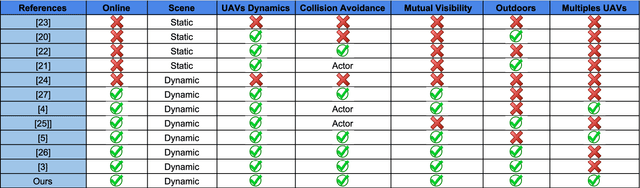
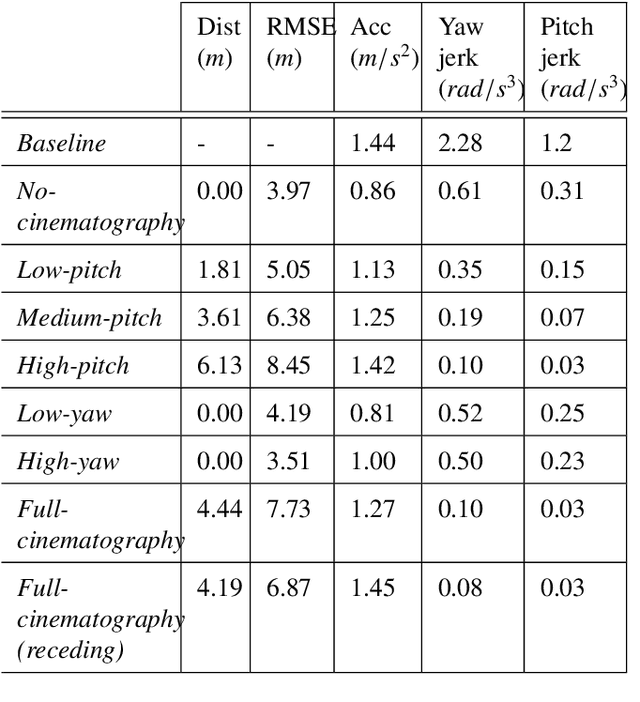
This paper presents a method for planning optimal trajectories with a team of Unmanned Aerial Vehicles (UAVs) performing autonomous cinematography. The method is able to plan trajectories online and in a distributed manner, providing coordination between the UAVs. We propose a novel non-linear formulation for this challenging problem of computing multi-UAV optimal trajectories for cinematography; integrating UAVs dynamics and collision avoidance constraints, together with cinematographic aspects like smoothness, gimbal mechanical limits and mutual camera visibility. We integrate our method within a hardware and software architecture for UAV cinematography that was previously developed within the framework of the MultiDrone project; and demonstrate its use with different types of shots filming a moving target outdoors. We provide extensive experimental results both in simulation and field experiments. We analyze the performance of the method and prove that it is able to compute online smooth trajectories, reducing jerky movements and complying with cinematography constraints.
Autonomous Execution of Cinematographic Shots with Multiple Drones
Jun 22, 2020
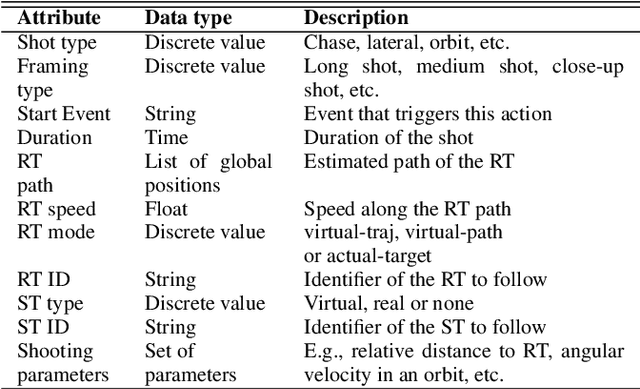
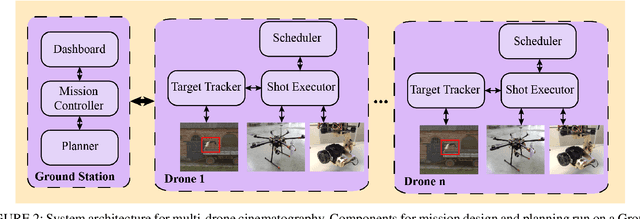
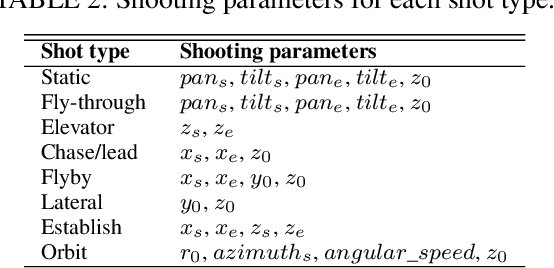
This paper presents a system for the execution of autonomous cinematography missions with a team of drones. The system allows media directors to design missions involving different types of shots with one or multiple cameras, running sequentially or concurrently. We introduce the complete architecture, which includes components for mission design, planning and execution. Then, we focus on the components related to autonomous mission execution. First, we propose a novel parametric description for shots, considering different types of camera motion and tracked targets; and we use it to implement a set of canonical shots. Second, for multi-drone shot execution, we propose distributed schedulers that activate different shot controllers on board the drones. Moreover, an event-based mechanism is used to synchronize shot execution among the drones and to account for inaccuracies during shot planning. Finally, we showcase the system with field experiments filming sport activities, including a real regatta event. We report on system integration and lessons learnt during our experimental campaigns.
LiDAR-based Control of Autonomous Rotorcraft for the Inspection of Pier-like Structures: Proofs
May 03, 2017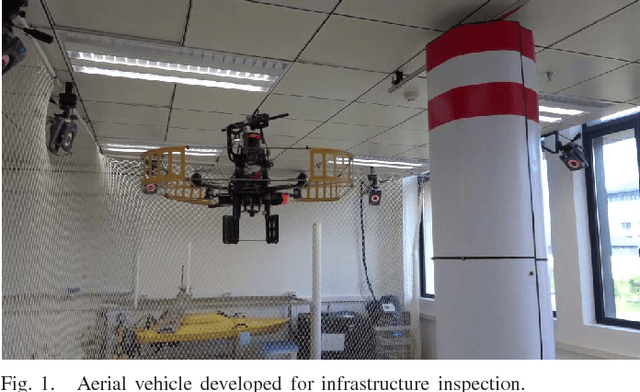
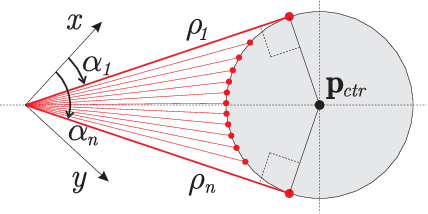
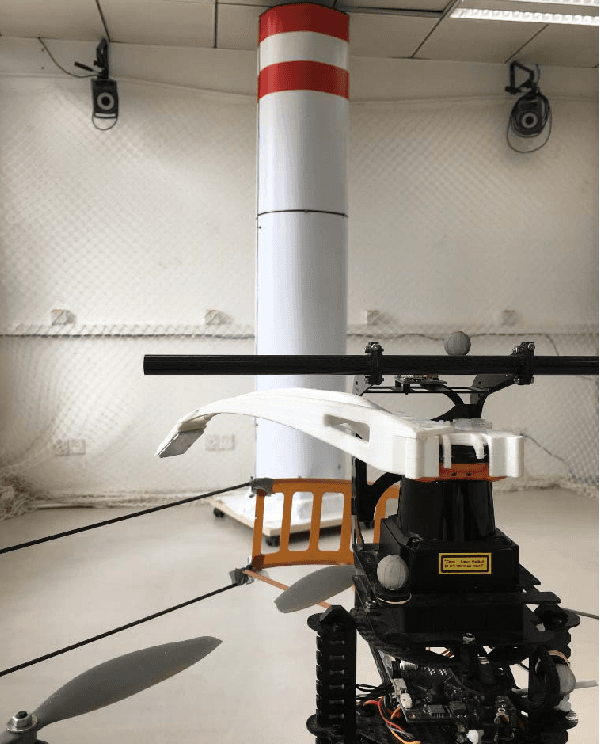
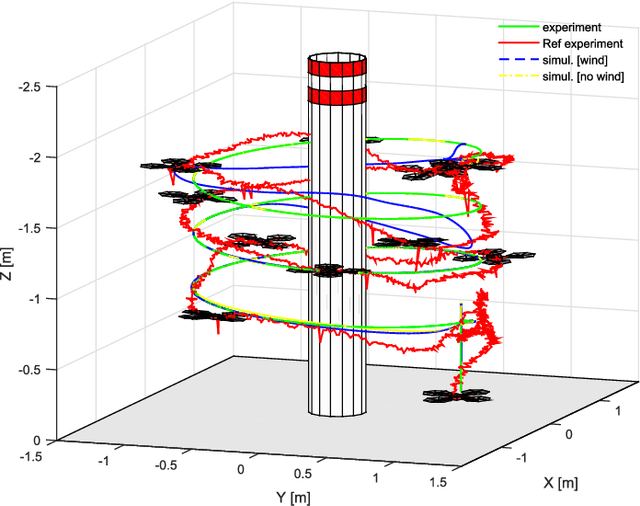
This is a complementary document to the paper presented in [1], to provide more detailed proofs for some results. The main paper addresses the problem of trajectory tracking control of autonomous rotorcraft in operation scenarios where only relative position measurements obtained from LiDAR sensors are possible. The proposed approach defines an alternative kinematic model, directly based on LiDAR measurements, and uses a trajectory-dependent error space to express the dynamic model of the vehicle. An LPV representation with piecewise affine dependence on the parameters is adopted to describe the error dynamics over a set of predefined operating regions, and a continuous-time $H_2$ control problem is solved using LMIs and implemented within the scope of gain-scheduling control theory.