 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Execution of Cinematographic Shots with Multiple Drones
Jun 22, 2020
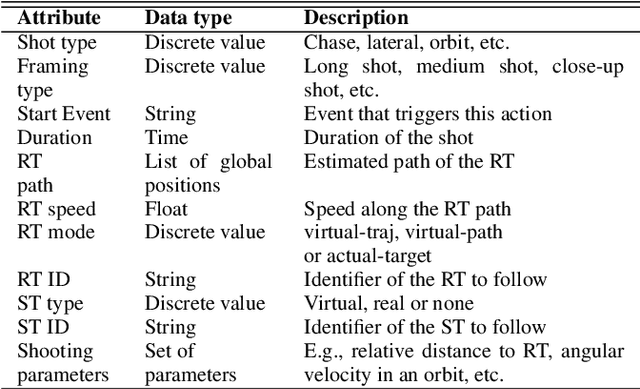
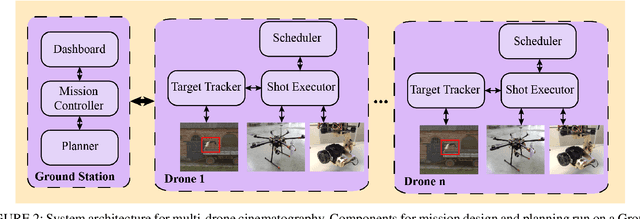
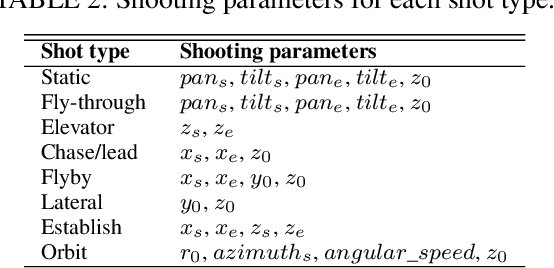
This paper presents a system for the execution of autonomous cinematography missions with a team of drones. The system allows media directors to design missions involving different types of shots with one or multiple cameras, running sequentially or concurrently. We introduce the complete architecture, which includes components for mission design, planning and execution. Then, we focus on the components related to autonomous mission execution. First, we propose a novel parametric description for shots, considering different types of camera motion and tracked targets; and we use it to implement a set of canonical shots. Second, for multi-drone shot execution, we propose distributed schedulers that activate different shot controllers on board the drones. Moreover, an event-based mechanism is used to synchronize shot execution among the drones and to account for inaccuracies during shot planning. Finally, we showcase the system with field experiments filming sport activities, including a real regatta event. We report on system integration and lessons learnt during our experimental campaigns.
Autonomous Planning for Multiple Aerial Cinematographers
May 14, 2020



This paper proposes a planning algorithm for autonomous media production with multiple Unmanned Aerial Vehicles (UAVs) in outdoor events. Given filming tasks specified by a media Director, we formulate an optimization problem to maximize the filming time considering battery constraints. As we conjecture that the problem is NP-hard, we consider a discretization version, and propose a graph-based algorithm that can find an optimal solution of the discrete problem for a single UAV in polynomial time. Then, a greedy strategy is applied to solve the problem sequentially for multiple UAVs. We demonstrate that our algorithm is efficient for small teams (3-5 UAVs) and that its performance is close to the optimum. We showcase our system in field experiments carrying out actual media production in an outdoor scenario with multiple UAVs.