 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Aerial Filming With Distributed Lighting by a Team of Unmanned Aerial Vehicles
Mar 02, 2023
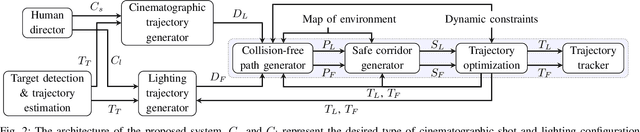
This letter describes a method for autonomous aerial cinematography with distributed lighting by a team of unmanned aerial vehicles (UAVs). Although camera-carrying multi-rotor helicopters have become commonplace in cinematography, their usage is limited to scenarios with sufficient natural light or of lighting provided by static artificial lights. We propose to use a formation of unmanned aerial vehicles as a tool for filming a target under illumination from various directions, which is one of the fundamental techniques of traditional cinematography. We decompose the multi-UAV trajectory optimization problem to tackle non-linear cinematographic aspects and obstacle avoidance at separate stages, which allows us to re-plan in real time and react to changes in dynamic environments. The performance of our method has been evaluated in realistic simulation scenarios and field experiments, where we show how it increases the quality of the shots and that it is capable of planning safe trajectories even in cluttered environments.
Kinodynamic Planning for an Energy-Efficient Autonomous Ornithopter
Oct 23, 2020


This paper presents a novel algorithm to plan energy-efficient trajectories for autonomous ornithopters. In general, trajectory optimization is quite a relevant problem for practical applications with \emph{Unmanned Aerial Vehicles} (UAVs). Even though the problem has been well studied for fixed and rotatory-wing vehicles, there are far fewer works exploring it for flapping-wing UAVs like ornithopters. These are of interest for many applications where long flight endurance, but also hovering capabilities are required. We propose an efficient approach to plan ornithopter trajectories that minimize energy consumption by combining gliding and flapping maneuvers. Our algorithm builds a tree of dynamically feasible trajectories and applies heuristic search for efficient online planning, using reference curves to guide the search and prune states. We present computational experiments to analyze and tune key parameters, as well as a comparison against a recent alternative probabilistic planning, showing best performance. Finally, we demonstrate how our algorithm can be used for planning perching maneuvers online.
Optimal Trajectory Planning for Cinematography with Multiple Unmanned Aerial Vehicles
Sep 09, 2020
This paper presents a method for planning optimal trajectories with a team of Unmanned Aerial Vehicles (UAVs) performing autonomous cinematography. The method is able to plan trajectories online and in a distributed manner, providing coordination between the UAVs. We propose a novel non-linear formulation for this challenging problem of computing multi-UAV optimal trajectories for cinematography; integrating UAVs dynamics and collision avoidance constraints, together with cinematographic aspects like smoothness, gimbal mechanical limits and mutual camera visibility. We integrate our method within a hardware and software architecture for UAV cinematography that was previously developed within the framework of the MultiDrone project; and demonstrate its use with different types of shots filming a moving target outdoors. We provide extensive experimental results both in simulation and field experiments. We analyze the performance of the method and prove that it is able to compute online smooth trajectories, reducing jerky movements and complying with cinematography constraints.
Autonomous Execution of Cinematographic Shots with Multiple Drones
Jun 22, 2020
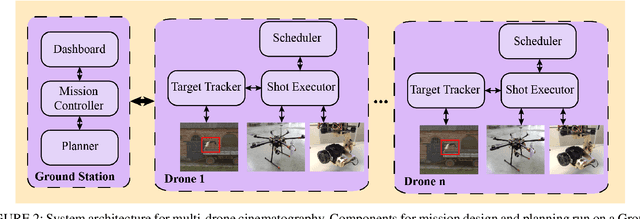
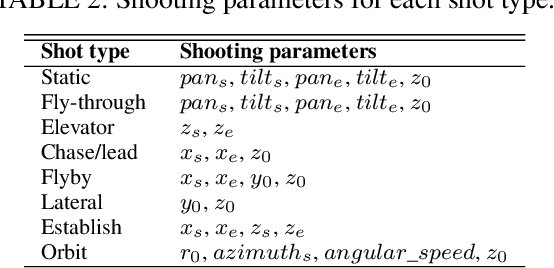
This paper presents a system for the execution of autonomous cinematography missions with a team of drones. The system allows media directors to design missions involving different types of shots with one or multiple cameras, running sequentially or concurrently. We introduce the complete architecture, which includes components for mission design, planning and execution. Then, we focus on the components related to autonomous mission execution. First, we propose a novel parametric description for shots, considering different types of camera motion and tracked targets; and we use it to implement a set of canonical shots. Second, for multi-drone shot execution, we propose distributed schedulers that activate different shot controllers on board the drones. Moreover, an event-based mechanism is used to synchronize shot execution among the drones and to account for inaccuracies during shot planning. Finally, we showcase the system with field experiments filming sport activities, including a real regatta event. We report on system integration and lessons learnt during our experimental campaigns.
Autonomous Planning for Multiple Aerial Cinematographers
May 14, 2020



This paper proposes a planning algorithm for autonomous media production with multiple Unmanned Aerial Vehicles (UAVs) in outdoor events. Given filming tasks specified by a media Director, we formulate an optimization problem to maximize the filming time considering battery constraints. As we conjecture that the problem is NP-hard, we consider a discretization version, and propose a graph-based algorithm that can find an optimal solution of the discrete problem for a single UAV in polynomial time. Then, a greedy strategy is applied to solve the problem sequentially for multiple UAVs. We demonstrate that our algorithm is efficient for small teams (3-5 UAVs) and that its performance is close to the optimum. We showcase our system in field experiments carrying out actual media production in an outdoor scenario with multiple UAVs.