 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDegradation-Aware Cooperative Multi-Modal GNSS-Denied Localization Leveraging LiDAR-Based Robot Detections
Oct 23, 2025Accurate long-term localization using onboard sensors is crucial for robots operating in Global Navigation Satellite System (GNSS)-denied environments. While complementary sensors mitigate individual degradations, carrying all the available sensor types on a single robot significantly increases the size, weight, and power demands. Distributing sensors across multiple robots enhances the deployability but introduces challenges in fusing asynchronous, multi-modal data from independently moving platforms. We propose a novel adaptive multi-modal multi-robot cooperative localization approach using a factor-graph formulation to fuse asynchronous Visual-Inertial Odometry (VIO), LiDAR-Inertial Odometry (LIO), and 3D inter-robot detections from distinct robots in a loosely-coupled fashion. The approach adapts to changing conditions, leveraging reliable data to assist robots affected by sensory degradations. A novel interpolation-based factor enables fusion of the unsynchronized measurements. LIO degradations are evaluated based on the approximate scan-matching Hessian. A novel approach of weighting odometry data proportionally to the Wasserstein distance between the consecutive VIO outputs is proposed. A theoretical analysis is provided, investigating the cooperative localization problem under various conditions, mainly in the presence of sensory degradations. The proposed method has been extensively evaluated on real-world data gathered with heterogeneous teams of an Unmanned Ground Vehicle (UGV) and Unmanned Aerial Vehicles (UAVs), showing that the approach provides significant improvements in localization accuracy in the presence of various sensory degradations.
Drones Guiding Drones: Cooperative Navigation of a Less-Equipped Micro Aerial Vehicle in Cluttered Environments
Dec 15, 2023
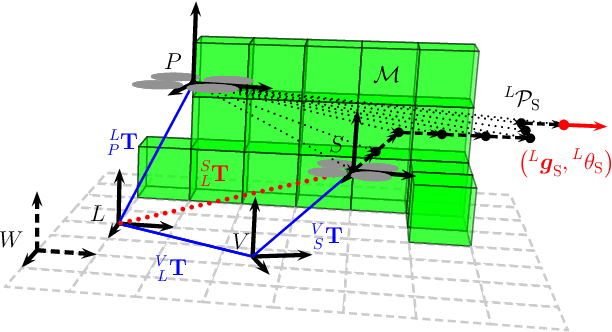
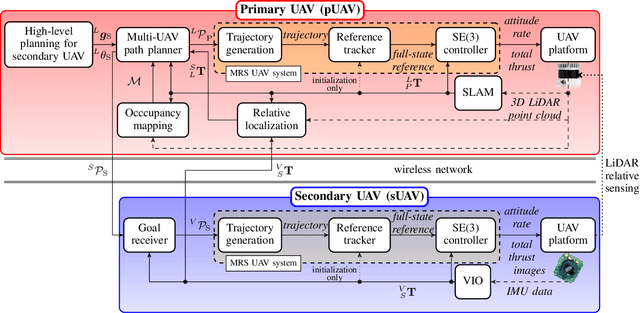
Reliable deployment of Unmanned Aerial Vehicles (UAVs) in cluttered unknown environments requires accurate sensors for obstacle avoidance. Such a requirement limits the usage of cheap and micro-scale vehicles with constrained payload capacity if industrial-grade reliability and precision are required. This paper investigates the possibility of offloading the necessity to carry heavy and expensive obstacle sensors to another member of the UAV team while preserving the desired obstacle avoidance capability. A novel cooperative guidance framework offloading the obstacle sensing requirements from a minimalistic secondary UAV to a superior primary UAV is proposed. The primary UAV constructs a dense occupancy map of the environment and plans collision-free paths for both UAVs to ensure reaching the desired secondary UAV's goal. The primary UAV guides the secondary UAV to follow the planned path while tracking the UAV using Light Detection and Ranging (LiDAR)-based relative localization. The proposed approach was verified in real-world experiments with a heterogeneous team of a 3D LiDAR-equipped primary UAV and a camera-equipped secondary UAV moving autonomously through unknown cluttered Global Navigation Satellite System (GNSS)-denied environments with the proposed framework running completely on board the UAVs.
Fusion of Visual-Inertial Odometry with LiDAR Relative Localization for Cooperative Guidance of a Micro-Scale Aerial Vehicle
Jun 30, 2023A novel relative localization approach for cooperative guidance of a micro-scale Unmanned Aerial Vehicle (UAV) fusing Visual-Inertial Odometry (VIO) with Light Detection and Ranging (LiDAR) is proposed in this paper. LiDAR-based localization is accurate and robust to challenging environmental conditions, but 3D LiDARs are relatively heavy and require large UAV platforms. Visual cameras are cheap and lightweight. However, visual-based self-localization methods exhibit lower accuracy and can suffer from significant drift with respect to the global reference frame. We focus on cooperative navigation in a heterogeneous team of a primary LiDAR-equipped UAV and secondary camera-equipped UAV. We propose a novel cooperative approach combining LiDAR relative localization data with VIO output on board the primary UAV to obtain an accurate pose of the secondary UAV. The pose estimate is used to guide the secondary UAV along trajectories defined in the primary UAV reference frame. The experimental evaluation has shown the superior accuracy of our method to the raw VIO output and demonstrated its capability to guide the secondary UAV along desired trajectories while mitigating VIO drift.
Autonomous Aerial Filming With Distributed Lighting by a Team of Unmanned Aerial Vehicles
Mar 02, 2023
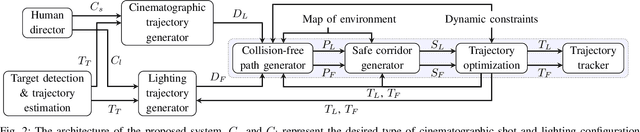
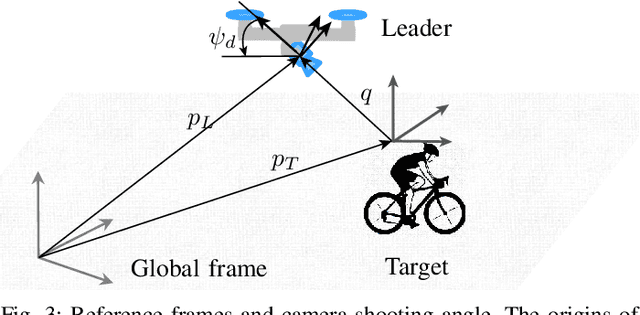
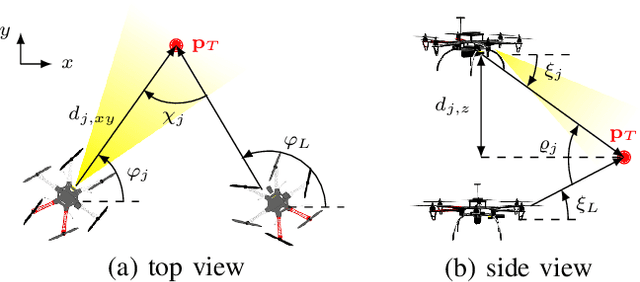
This letter describes a method for autonomous aerial cinematography with distributed lighting by a team of unmanned aerial vehicles (UAVs). Although camera-carrying multi-rotor helicopters have become commonplace in cinematography, their usage is limited to scenarios with sufficient natural light or of lighting provided by static artificial lights. We propose to use a formation of unmanned aerial vehicles as a tool for filming a target under illumination from various directions, which is one of the fundamental techniques of traditional cinematography. We decompose the multi-UAV trajectory optimization problem to tackle non-linear cinematographic aspects and obstacle avoidance at separate stages, which allows us to re-plan in real time and react to changes in dynamic environments. The performance of our method has been evaluated in realistic simulation scenarios and field experiments, where we show how it increases the quality of the shots and that it is capable of planning safe trajectories even in cluttered environments.