 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Aerial Filming With Distributed Lighting by a Team of Unmanned Aerial Vehicles
Paper and Code
Mar 02, 2023
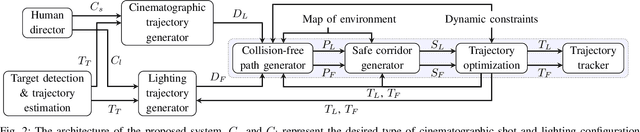
This letter describes a method for autonomous aerial cinematography with distributed lighting by a team of unmanned aerial vehicles (UAVs). Although camera-carrying multi-rotor helicopters have become commonplace in cinematography, their usage is limited to scenarios with sufficient natural light or of lighting provided by static artificial lights. We propose to use a formation of unmanned aerial vehicles as a tool for filming a target under illumination from various directions, which is one of the fundamental techniques of traditional cinematography. We decompose the multi-UAV trajectory optimization problem to tackle non-linear cinematographic aspects and obstacle avoidance at separate stages, which allows us to re-plan in real time and react to changes in dynamic environments. The performance of our method has been evaluated in realistic simulation scenarios and field experiments, where we show how it increases the quality of the shots and that it is capable of planning safe trajectories even in cluttered environments.