 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn efficient strategy for path planning with a tethered marsupial robotics system
Aug 04, 2024



A marsupial robotics system comprises three components: an Unmanned Ground Vehicle (UGV), an Unmanned Aerial Vehicle (UAV), and a tether connecting both robots. Marsupial systems are highly beneficial in industry as they extend the UAV's battery life during flight. This paper introduces a novel strategy for a specific path planning problem in marsupial systems, where each of the components must avoid collisions with ground and aerial obstacles modeled as 3D cuboids. Given an initial configuration in which the UAV is positioned atop the UGV, the goal is to reach an aerial target with the UAV. We assume that the UGV first moves to a position from which the UAV can take off and fly through a vertical plane to reach an aerial target. We propose an approach that discretizes the space to approximate an optimal solution, minimizing the sum of the lengths of the ground and air paths. First, we assume a taut tether and use a novel algorithm that leverages the convexity of the tether and the geometry of obstacles to efficiently determine the locus of feasible take-off points for the UAV. We then apply this result to scenarios that involve loose tethers. The simulation test results show that our approach can solve complex situations in seconds, outperforming a baseline planning algorithm based on RRT* (Rapidly exploring Random Trees).
Scaling and compressing melodies using geometric similarity measures
Sep 19, 2022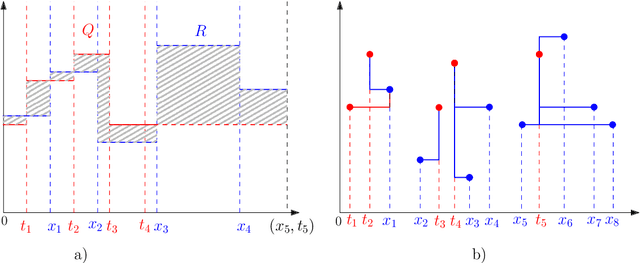
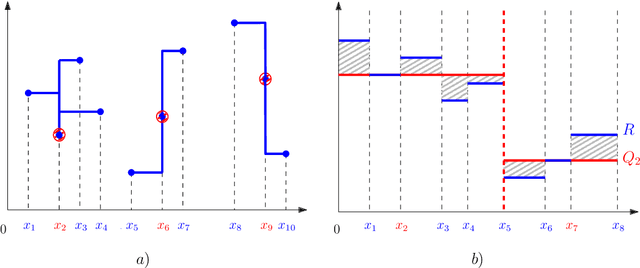
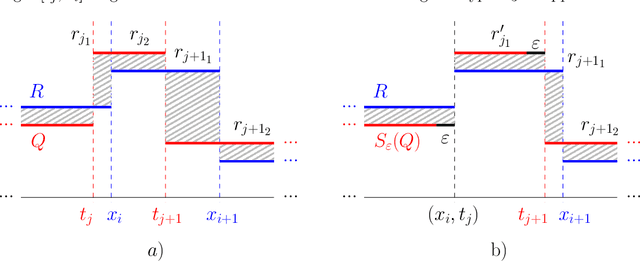
Melodic similarity measurement is of key importance in music information retrieval. In this paper, we use geometric matching techniques to measure the similarity between two melodies. We represent music as sets of points or sets of horizontal line segments in the Euclidean plane and propose efficient algorithms for optimization problems inspired in two operations on melodies; linear scaling and audio compression. In the scaling problem, an incoming query melody is scaled forward until the similarity measure between the query and a reference melody is minimized. The compression problem asks for a subset of notes of a given melody such that the matching cost between the selected notes and the reference melody is minimized.
Kinodynamic Planning for an Energy-Efficient Autonomous Ornithopter
Oct 23, 2020

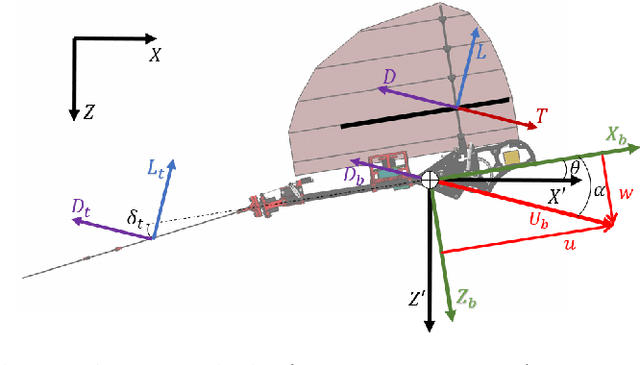

This paper presents a novel algorithm to plan energy-efficient trajectories for autonomous ornithopters. In general, trajectory optimization is quite a relevant problem for practical applications with \emph{Unmanned Aerial Vehicles} (UAVs). Even though the problem has been well studied for fixed and rotatory-wing vehicles, there are far fewer works exploring it for flapping-wing UAVs like ornithopters. These are of interest for many applications where long flight endurance, but also hovering capabilities are required. We propose an efficient approach to plan ornithopter trajectories that minimize energy consumption by combining gliding and flapping maneuvers. Our algorithm builds a tree of dynamically feasible trajectories and applies heuristic search for efficient online planning, using reference curves to guide the search and prune states. We present computational experiments to analyze and tune key parameters, as well as a comparison against a recent alternative probabilistic planning, showing best performance. Finally, we demonstrate how our algorithm can be used for planning perching maneuvers online.