 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetecting broken Absorber Tubes in CSP plants using intelligent sampling and dual loss
Nov 25, 2022Concentrated solar power (CSP) is one of the growing technologies that is leading the process of changing from fossil fuels to renewable energies. The sophistication and size of the systems require an increase in maintenance tasks to ensure reliability, availability, maintainability and safety. Currently, automatic fault detection in CSP plants using Parabolic Trough Collector systems evidences two main drawbacks: 1) the devices in use needs to be manually placed near the receiver tube, 2) the Machine Learning-based solutions are not tested in real plants. We address both gaps by combining the data extracted with the use of an Unmaned Aerial Vehicle, and the data provided by sensors placed within 7 real plants. The resulting dataset is the first one of this type and can help to standardize research activities for the problem of fault detection in this type of plants. Our work proposes supervised machine-learning algorithms for detecting broken envelopes of the absorber tubes in CSP plants. The proposed solution takes the class imbalance problem into account, boosting the accuracy of the algorithms for the minority class without harming the overall performance of the models. For a Deep Residual Network, we solve an imbalance and a balance problem at the same time, which increases by 5% the Recall of the minority class with no harm to the F1-score. Additionally, the Random Under Sampling technique boost the performance of traditional Machine Learning models, being the Histogram Gradient Boost Classifier the algorithm with the highest increase (3%) in the F1-Score. To the best of our knowledge, this paper is the first providing an automated solution to this problem using data from operating plants.
Efficient inspection of underground galleries using k robots with limited energy
Sep 21, 2022We study the problem of optimally inspecting an underground (underwater) gallery with k agents. We consider a gallery with a single opening and with a tree topology rooted at the opening. Due to the small diameter of the pipes (caves), the agents are small robots with limited autonomy and there is a supply station at the gallery's opening. Therefore, they are initially placed at the root and periodically need to return to the supply station. Our goal is to design off-line strategies to efficiently cover the tree with $k$ small robots. We consider two objective functions: the covering time (maximum collective time) and the covering distance (total traveled distance). The maximum collective time is the maximum time spent by a robot needs to finish its assigned task (assuming that all the robots start at the same time); the total traveled distance is the sum of the lengths of all the covering walks. Since the problems are intractable for big trees, we propose approximation algorithms. Both efficiency and accuracy of the suboptimal solutions are empirically showed for random trees through intensive numerical experiments.
Scaling and compressing melodies using geometric similarity measures
Sep 19, 2022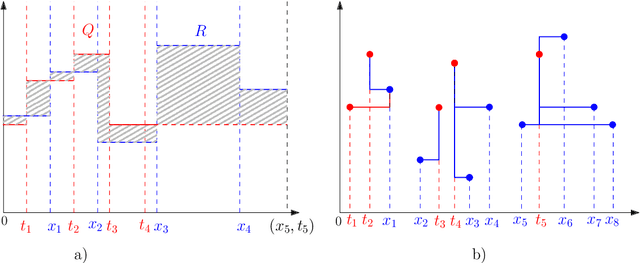
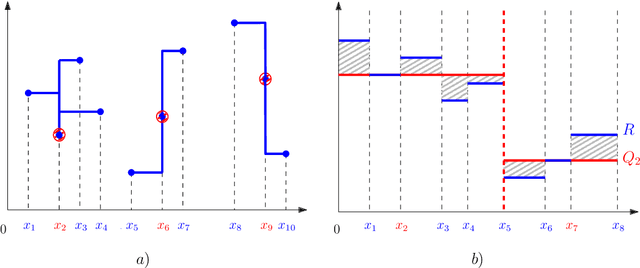
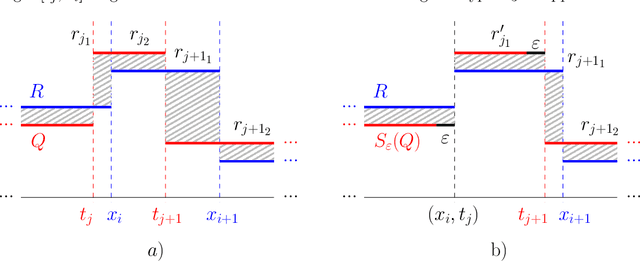
Melodic similarity measurement is of key importance in music information retrieval. In this paper, we use geometric matching techniques to measure the similarity between two melodies. We represent music as sets of points or sets of horizontal line segments in the Euclidean plane and propose efficient algorithms for optimization problems inspired in two operations on melodies; linear scaling and audio compression. In the scaling problem, an incoming query melody is scaled forward until the similarity measure between the query and a reference melody is minimized. The compression problem asks for a subset of notes of a given melody such that the matching cost between the selected notes and the reference melody is minimized.