 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn efficient strategy for path planning with a tethered marsupial robotics system
Aug 04, 2024



A marsupial robotics system comprises three components: an Unmanned Ground Vehicle (UGV), an Unmanned Aerial Vehicle (UAV), and a tether connecting both robots. Marsupial systems are highly beneficial in industry as they extend the UAV's battery life during flight. This paper introduces a novel strategy for a specific path planning problem in marsupial systems, where each of the components must avoid collisions with ground and aerial obstacles modeled as 3D cuboids. Given an initial configuration in which the UAV is positioned atop the UGV, the goal is to reach an aerial target with the UAV. We assume that the UGV first moves to a position from which the UAV can take off and fly through a vertical plane to reach an aerial target. We propose an approach that discretizes the space to approximate an optimal solution, minimizing the sum of the lengths of the ground and air paths. First, we assume a taut tether and use a novel algorithm that leverages the convexity of the tether and the geometry of obstacles to efficiently determine the locus of feasible take-off points for the UAV. We then apply this result to scenarios that involve loose tethers. The simulation test results show that our approach can solve complex situations in seconds, outperforming a baseline planning algorithm based on RRT* (Rapidly exploring Random Trees).
Stochastic strategies for patrolling a terrain with a synchronized multi-robot system
Sep 14, 2022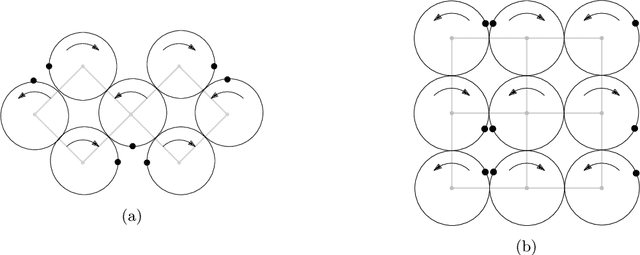
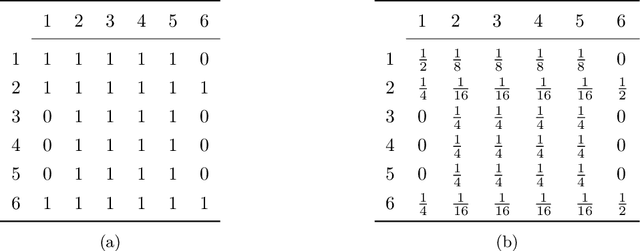
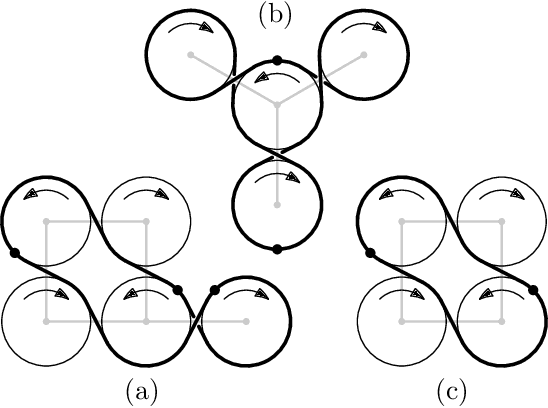

A group of cooperative aerial robots can be deployed to efficiently patrol a terrain, in which each robot flies around an assigned area and shares information with the neighbors periodically in order to protect or supervise it. To ensure robustness, previous works on these synchronized systems propose sending a robot to the neighboring area in case it detects a failure. In order to deal with unpredictability and to improve on the efficiency in the deterministic patrolling scheme, this paper proposes random strategies to cover the areas distributed among the agents. First, a theoretical study of the stochastic process is addressed in this paper for two metrics: the \emph{idle time}, the expected time between two consecutive observations of any point of the terrain and the \emph{isolation time}, the expected time that a robot is without communication with any other robot. After that, the random strategies are experimentally compared with the deterministic strategy adding another metric: the \emph{broadcast time}, the expected time elapsed from the moment a robot emits a message until it is received by all the other robots of the team. The simulations show that theoretical results are in good agreement with the simulations and the random strategies outperform the behavior obtained with the deterministic protocol proposed in the literature.