 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Sequential Stochastic Deployment of Multiple Passenger Robots
Paper and Code
Oct 19, 2021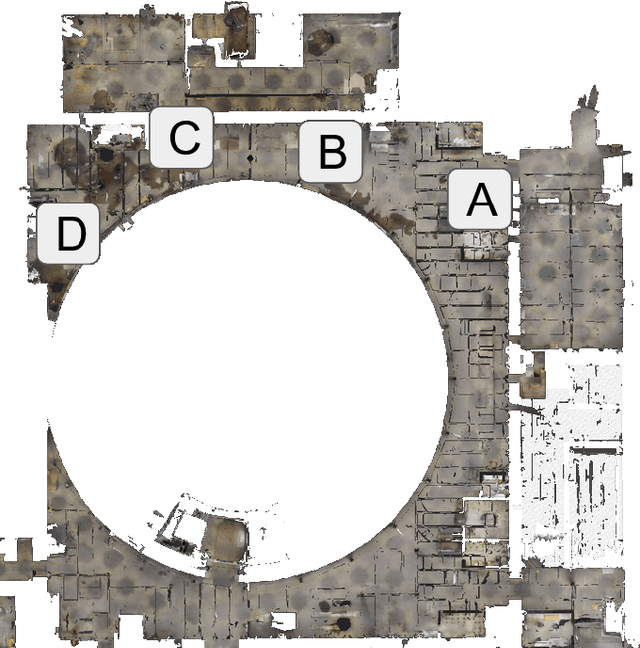
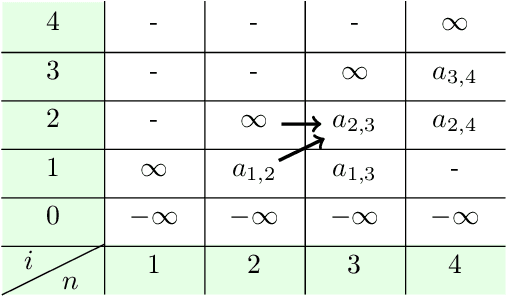
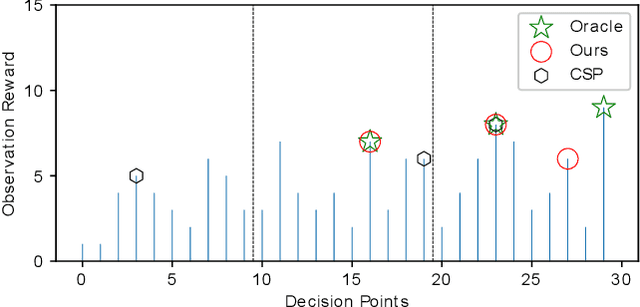
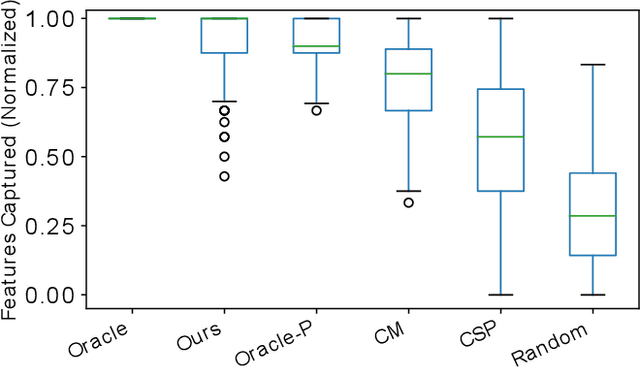
We present a new algorithm for deploying passenger robots in marsupial robot systems. A marsupial robot system consists of a carrier robot (e.g., a ground vehicle), which is highly capable and has a long mission duration, and at least one passenger robot (e.g., a short-duration aerial vehicle) transported by the carrier. We optimize the performance of passenger robot deployment by proposing an algorithm that reasons over uncertainty by exploiting information about the prior probability distribution of features of interest in the environment. Our algorithm is formulated as a solution to a sequential stochastic assignment problem (SSAP). The key feature of the algorithm is a recurrence relationship that defines a set of observation thresholds that are used to decide when to deploy passenger robots. Our algorithm computes the optimal policy in $O(NR)$ time, where $N$ is the number of deployment decision points and $R$ is the number of passenger robots to be deployed. We conducted drone deployment exploration experiments on real-world data from the DARPA Subterranean challenge to test the SSAP algorithm. Our results show that our deployment algorithm outperforms other competing algorithms, such as the classic secretary approach and baseline partitioning methods, and is comparable to an offline oracle algorithm.