 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUltrafast Sampling-based Kinodynamic Planning via Differential Flatness
Mar 17, 2026Motion planning under dynamics constraints, i.e., kinodynamic planning, enables safe robot operation by generating dynamically feasible trajectories that the robot can accurately track. For high-\dof robots such as manipulators, sampling-based motion planners are commonly used, especially for complex tasks in cluttered environments. However, enforcing constraints on robot dynamics in such planners requires solving either challenging two-point boundary value problems (BVPs) or propagating robot dynamics over time, both of which are computational bottlenecks that drastically increase planning times. Meanwhile, recent efforts have shown that sampling-based motion planners can generate plans in microseconds using parallelization, but are limited to geometric paths. This paper develops AkinoPDF, a fast parallelized sampling-based kinodynamic motion planning technique for a broad class of differentially flat robot systems, including manipulators, ground and aerial vehicles, and more. Differential flatness allows us to transform the motion planning problem from the original state space to a flat output space, where an analytical time-parameterized solution of the BVP and dynamics integration can be obtained. A trajectory in the flat output space is then converted back to a closed-form dynamically feasible trajectory in the original state space, enabling fast validation via ``single instruction, multiple data" parallelism. Our method is fast, exact, and compatible with any sampling-based motion planner. We extensively verify the effectiveness of our approach in both simulated benchmarks and real experiments with cluttered and dynamic environments, requiring mere microseconds to milliseconds of planning time.
You've Got a Golden Ticket: Improving Generative Robot Policies With A Single Noise Vector
Mar 16, 2026What happens when a pretrained generative robot policy is provided a constant initial noise as input, rather than repeatedly sampling it from a Gaussian? We demonstrate that the performance of a pretrained, frozen diffusion or flow matching policy can be improved with respect to a downstream reward by swapping the sampling of initial noise from the prior distribution (typically isotropic Gaussian) with a well-chosen, constant initial noise input -- a golden ticket. We propose a search method to find golden tickets using Monte-Carlo policy evaluation that keeps the pretrained policy frozen, does not train any new networks, and is applicable to all diffusion/flow matching policies (and therefore many VLAs). Our approach to policy improvement makes no assumptions beyond being able to inject initial noise into the policy and calculate (sparse) task rewards of episode rollouts, making it deployable with no additional infrastructure or models. Our method improves the performance of policies in 38 out of 43 tasks across simulated and real-world robot manipulation benchmarks, with relative improvements in success rate by up to 58% for some simulated tasks, and 60% within 50 search episodes for real-world tasks. We also show unique benefits of golden tickets for multi-task settings: the diversity of behaviors from different tickets naturally defines a Pareto frontier for balancing different objectives (e.g., speed, success rates); in VLAs, we find that a golden ticket optimized for one task can also boost performance in other related tasks. We release a codebase with pretrained policies and golden tickets for simulation benchmarks using VLAs, diffusion policies, and flow matching policies.
AORRTC: Almost-Surely Asymptotically Optimal Planning with RRT-Connect
May 15, 2025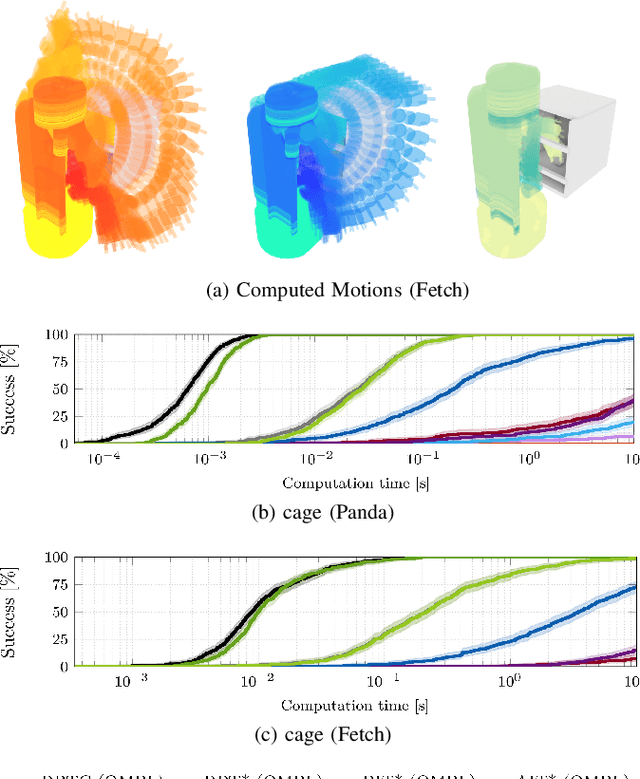
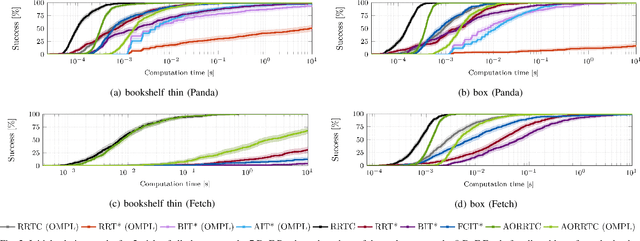
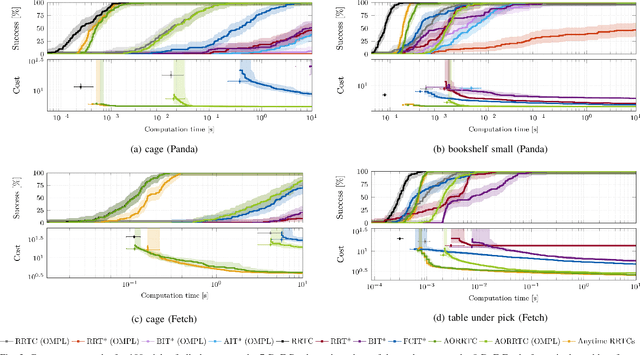
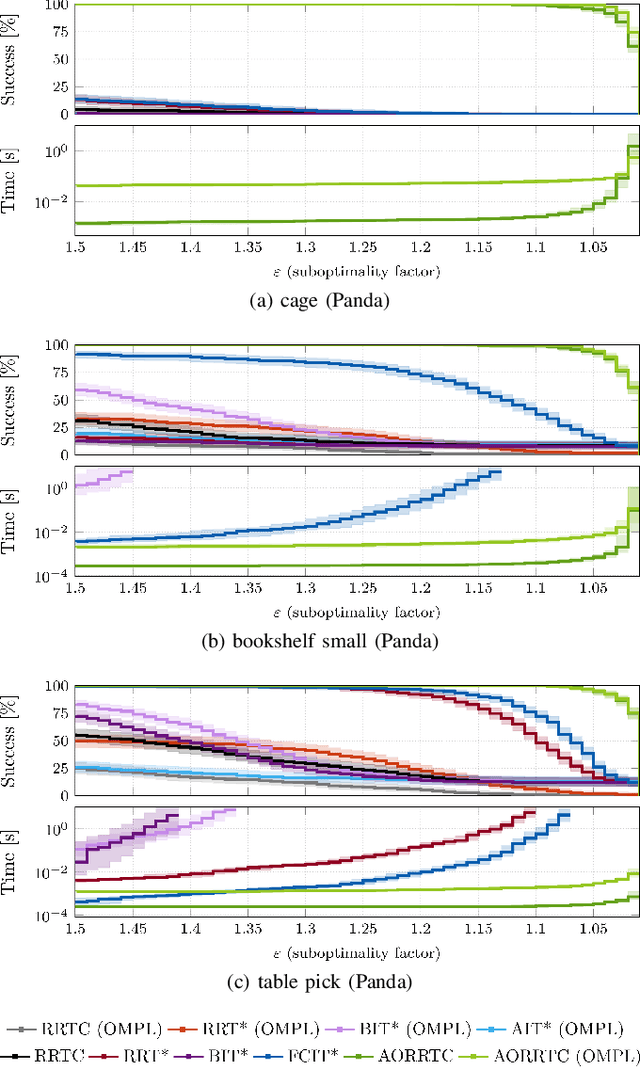
Finding high-quality solutions quickly is an important objective in motion planning. This is especially true for high-degree-of-freedom robots. Satisficing planners have traditionally found feasible solutions quickly but provide no guarantees on their optimality, while almost-surely asymptotically optimal (a.s.a.o.) planners have probabilistic guarantees on their convergence towards an optimal solution but are more computationally expensive. This paper uses the AO-x meta-algorithm to extend the satisficing RRT-Connect planner to optimal planning. The resulting Asymptotically Optimal RRT-Connect (AORRTC) finds initial solutions in similar times as RRT-Connect and uses any additional planning time to converge towards the optimal solution in an anytime manner. It is proven to be probabilistically complete and a.s.a.o. AORRTC was tested with the Panda (7 DoF) and Fetch (8 DoF) robotic arms on the MotionBenchMaker dataset. These experiments show that AORRTC finds initial solutions as fast as RRT-Connect and faster than the tested state-of-the-art a.s.a.o. algorithms while converging to better solutions faster. AORRTC finds solutions to difficult high-DoF planning problems in milliseconds where the other a.s.a.o. planners could not consistently find solutions in seconds. This performance was demonstrated both with and without single instruction/multiple data (SIMD) acceleration.
Nearest-Neighbourless Asymptotically Optimal Motion Planning with Fully Connected Informed Trees (FCIT*)
Nov 26, 2024Improving the performance of motion planning algorithms for high-degree-of-freedom robots usually requires reducing the cost or frequency of computationally expensive operations. Traditionally, and especially for asymptotically optimal sampling-based motion planners, the most expensive operations are local motion validation and querying the nearest neighbours of a configuration. Recent advances have significantly reduced the cost of motion validation by using single instruction/multiple data (SIMD) parallelism to improve solution times for satisficing motion planning problems. These advances have not yet been applied to asymptotically optimal motion planning. This paper presents Fully Connected Informed Trees (FCIT*), the first fully connected, informed, anytime almost-surely asymptotically optimal (ASAO) algorithm. FCIT* exploits the radically reduced cost of edge evaluation via SIMD parallelism to build and search fully connected graphs. This removes the need for nearest-neighbours structures, which are a dominant cost for many sampling-based motion planners, and allows it to find initial solutions faster than state-of-the-art ASAO (VAMP, OMPL) and satisficing (OMPL) algorithms on the MotionBenchMaker dataset while converging towards optimal plans in an anytime manner.
Scaling Long-Horizon Online POMDP Planning via Rapid State Space Sampling
Nov 11, 2024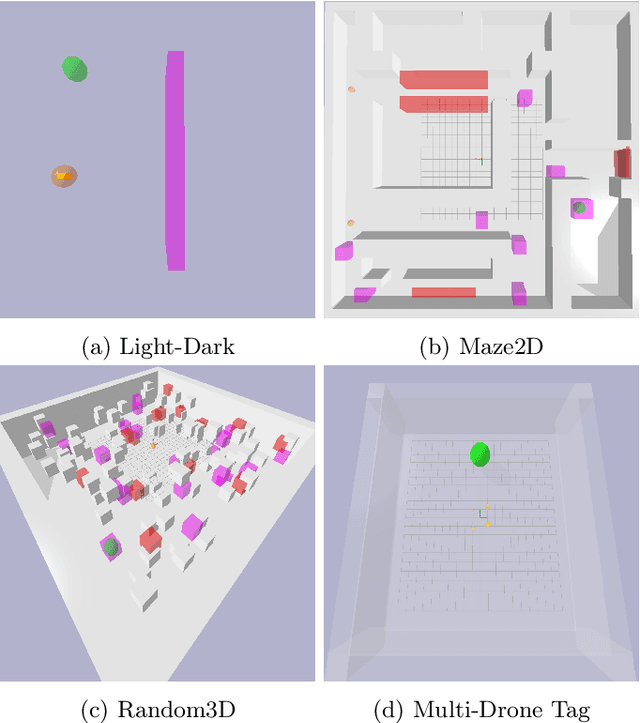
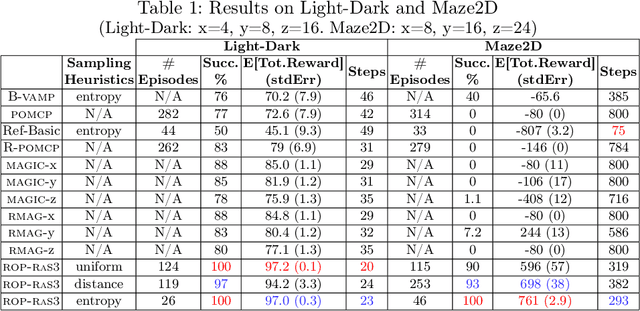
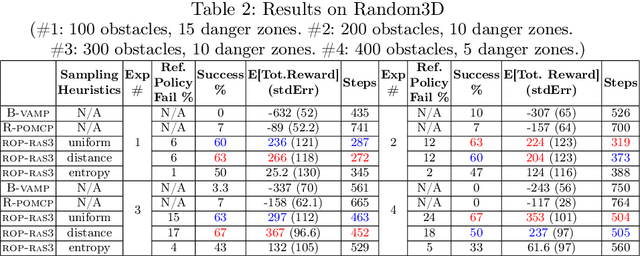
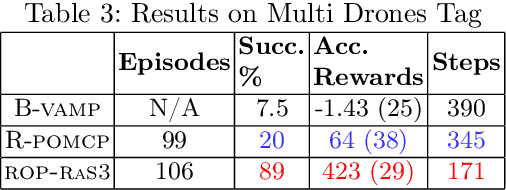
Partially Observable Markov Decision Processes (POMDPs) are a general and principled framework for motion planning under uncertainty. Despite tremendous improvement in the scalability of POMDP solvers, long-horizon POMDPs (e.g., $\geq15$ steps) remain difficult to solve. This paper proposes a new approximate online POMDP solver, called Reference-Based Online POMDP Planning via Rapid State Space Sampling (ROP-RaS3). ROP-RaS3 uses novel extremely fast sampling-based motion planning techniques to sample the state space and generate a diverse set of macro actions online which are then used to bias belief-space sampling and infer high-quality policies without requiring exhaustive enumeration of the action space -- a fundamental constraint for modern online POMDP solvers. ROP-RaS3 is evaluated on various long-horizon POMDPs, including on a problem with a planning horizon of more than 100 steps and a problem with a 15-dimensional state space that requires more than 20 look ahead steps. In all of these problems, ROP-RaS3 substantially outperforms other state-of-the-art methods by up to multiple folds.
Collision-Affording Point Trees: SIMD-Amenable Nearest Neighbors for Fast Collision Checking
Jun 04, 2024



Motion planning against sensor data is often a critical bottleneck in real-time robot control. For sampling-based motion planners, which are effective for high-dimensional systems such as manipulators, the most time-intensive component is collision checking. We present a novel spatial data structure, the collision-affording point tree (CAPT): an exact representation of point clouds that accelerates collision-checking queries between robots and point clouds by an order of magnitude, with an average query time of less than 10 nanoseconds on 3D scenes comprising thousands of points. With the CAPT, sampling-based planners can generate valid, high-quality paths in under a millisecond, with total end-to-end computation time faster than 60 FPS, on a single thread of a consumer-grade CPU. We also present a point cloud filtering algorithm, based on space-filling curves, which reduces the number of points in a point cloud while preserving structure. Our approach enables robots to plan at real-time speeds in sensed environments, opening up potential uses of planning for high-dimensional systems in dynamic, changing, and unmodeled environments.
Motions in Microseconds via Vectorized Sampling-Based Planning
Sep 28, 2023



Modern sampling-based motion planning algorithms typically take between hundreds of milliseconds to dozens of seconds to find collision-free motions for high degree-of-freedom problems. This paper presents performance improvements of more than 500x over the state-of-the-art, bringing planning times into the range of microseconds and solution rates into the range of kilohertz, without specialized hardware. Our key insight is how to exploit fine-grained parallelism within sampling-based planners, providing generality-preserving algorithmic improvements to any such planner and significantly accelerating critical subroutines, such as forward kinematics and collision checking. We demonstrate our approach over a diverse set of challenging, realistic problems for complex robots ranging from 7 to 14 degrees-of-freedom. Moreover, we show that our approach does not require high-power hardware by also evaluating on a low-power single-board computer. The planning speeds demonstrated are fast enough to reside in the range of control frequencies and open up new avenues of motion planning research.
Stochastic Implicit Neural Signed Distance Functions for Safe Motion Planning under Sensing Uncertainty
Sep 28, 2023



Motion planning under sensing uncertainty is critical for robots in unstructured environments to guarantee safety for both the robot and any nearby humans. Most work on planning under uncertainty does not scale to high-dimensional robots such as manipulators, assumes simplified geometry of the robot or environment, or requires per-object knowledge of noise. Instead, we propose a method that directly models sensor-specific aleatoric uncertainty to find safe motions for high-dimensional systems in complex environments, without exact knowledge of environment geometry. We combine a novel implicit neural model of stochastic signed distance functions with a hierarchical optimization-based motion planner to plan low-risk motions without sacrificing path quality. Our method also explicitly bounds the risk of the path, offering trustworthiness. We empirically validate that our method produces safe motions and accurate risk bounds and is safer than baseline approaches.
Object Reconfiguration with Simulation-Derived Feasible Actions
Feb 27, 2023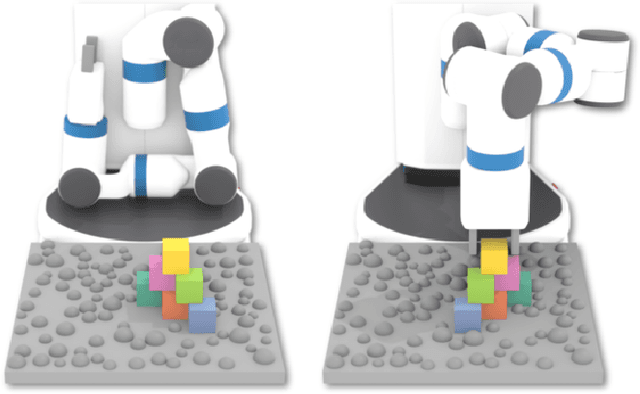
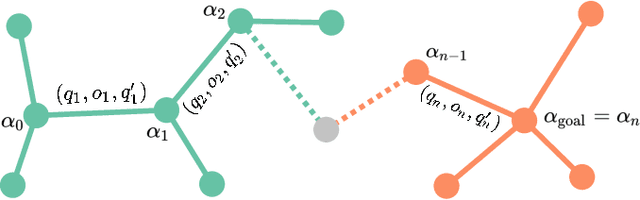
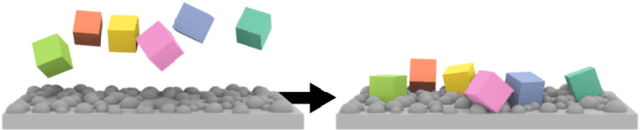

3D object reconfiguration encompasses common robot manipulation tasks in which a set of objects must be moved through a series of physically feasible state changes into a desired final configuration. Object reconfiguration is challenging to solve in general, as it requires efficient reasoning about environment physics that determine action validity. This information is typically manually encoded in an explicit transition system. Constructing these explicit encodings is tedious and error-prone, and is often a bottleneck for planner use. In this work, we explore embedding a physics simulator within a motion planner to implicitly discover and specify the valid actions from any state, removing the need for manual specification of action semantics. Our experiments demonstrate that the resulting simulation-based planner can effectively produce physically valid rearrangement trajectories for a range of 3D object reconfiguration problems without requiring more than an environment description and start and goal arrangements.
Task and Motion Informed Trees : Almost-Surely Asymptotically Optimal Integrated Task and Motion Planning
Oct 17, 2022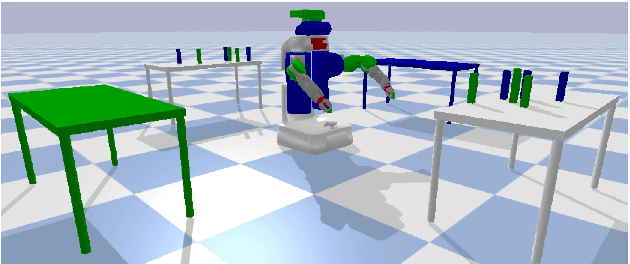
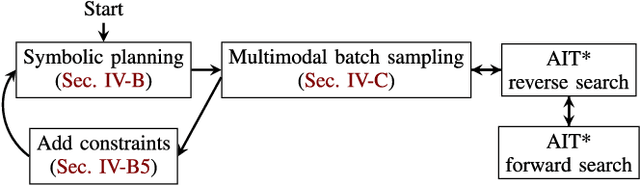

High-level autonomy requires discrete and continuous reasoning to decide both what actions to take and how to execute them. Integrated Task and Motion Planning (TMP) algorithms solve these hybrid problems jointly to consider constraints between the discrete symbolic actions (i.e., the task plan) and their continuous geometric realization (i.e., motion plans). This joint approach solves more difficult problems than approaches that address the task and motion subproblems independently. TMP algorithms combine and extend results from both task and motion planning. TMP has mainly focused on computational performance and completeness and less on solution optimality. Optimal TMP is difficult because the independent optima of the subproblems may not be the optimal integrated solution, which can only be found by jointly optimizing both plans. This paper presents Task and Motion Informed Trees (TMIT*), an optimal TMP algorithm that combines results from makespan-optimal task planning and almost-surely asymptotically optimal motion planning. TMIT* interleaves asymmetric forward and reverse searches to delay computationally expensive operations until necessary and perform an efficient informed search directly in the problem's hybrid state space. This allows it to solve problems quickly and then converge towards the optimal solution with additional computational time, as demonstrated on the evaluated robotic-manipulation benchmark problems.
* 9 pages, 5 figures. Accepted to IEEE RA-L and IROS 2022