 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Planner Optimization Problem: Formulations and Frameworks
Mar 14, 2023Identifying internal parameters for planning is crucial to maximizing the performance of a planner. However, automatically tuning internal parameters which are conditioned on the problem instance is especially challenging. A recent line of work focuses on learning planning parameter generators, but lack a consistent problem definition and software framework. This work proposes the unified planner optimization problem (POP) formulation, along with the Open Planner Optimization Framework (OPOF), a highly extensible software framework to specify and to solve these problems in a reusable manner.
Object Reconfiguration with Simulation-Derived Feasible Actions
Feb 27, 20233D object reconfiguration encompasses common robot manipulation tasks in which a set of objects must be moved through a series of physically feasible state changes into a desired final configuration. Object reconfiguration is challenging to solve in general, as it requires efficient reasoning about environment physics that determine action validity. This information is typically manually encoded in an explicit transition system. Constructing these explicit encodings is tedious and error-prone, and is often a bottleneck for planner use. In this work, we explore embedding a physics simulator within a motion planner to implicitly discover and specify the valid actions from any state, removing the need for manual specification of action semantics. Our experiments demonstrate that the resulting simulation-based planner can effectively produce physically valid rearrangement trajectories for a range of 3D object reconfiguration problems without requiring more than an environment description and start and goal arrangements.
Simulating Autonomous Driving in Massive Mixed Urban Traffic
Nov 11, 2020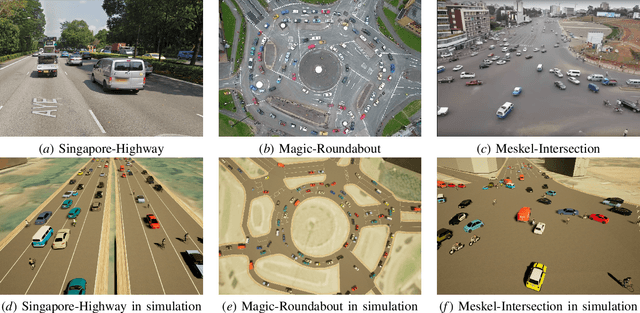
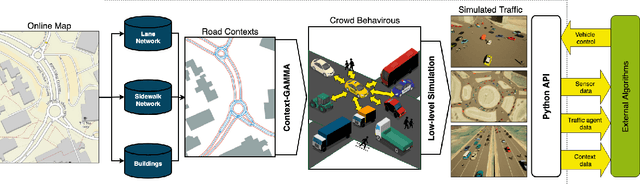
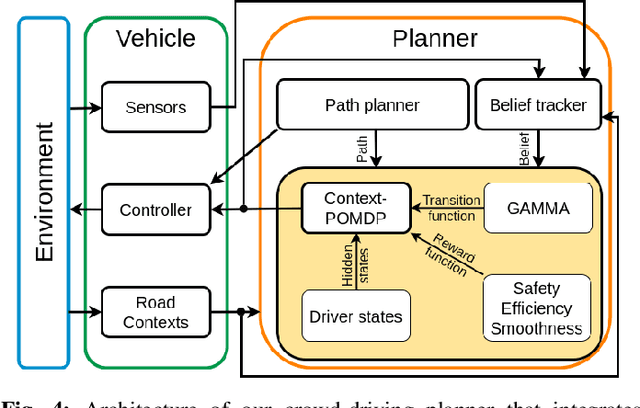
Autonomous driving in an unregulated urban crowd is an outstanding challenge, especially, in the presence of many aggressive, high-speed traffic participants. This paper presents SUMMIT, a high-fidelity simulator that facilitates the development and testing of crowd-driving algorithms. SUMMIT simulates dense, unregulated urban traffic at any worldwide locations as supported by the OpenStreetMap. The core of SUMMIT is a multi-agent motion model, GAMMA, that models the behaviours of heterogeneous traffic agents, and a real-time POMDP planner, Context-POMDP, that serves as a driving expert. SUMMIT is built as an extension of CARLA and inherits from it the physical and visual realism for autonomous driving simulation. SUMMIT supports a wide range of applications, including perception, vehicle control or planning, and end-to-end learning. We validate the realism of our motion model using its traffic motion prediction accuracy on various real-world data sets. We also provide several real-world benchmark scenarios to show that SUMMIT simulates complex, realistic traffic behaviors, and Context-POMDP drives safely and efficiently in challenging crowd-driving settings.
MAGIC: Learning Macro-Actions for Online POMDP Planning using Generator-Critic
Nov 07, 2020

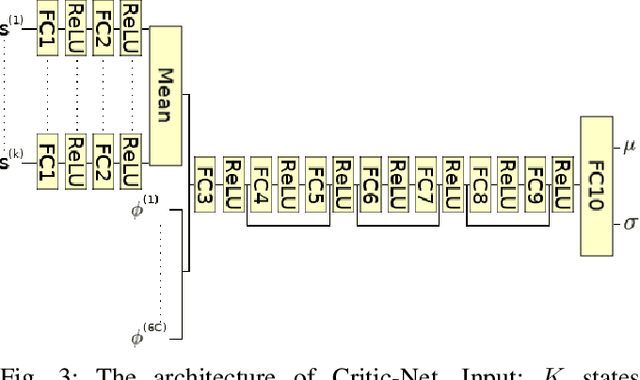

When robots operate in the real-world, they need to handle uncertainties in sensing, acting, and the environment. Many tasks also require reasoning about long-term consequences of robot decisions. The partially observable Markov decision process (POMDP) offers a principled approach for planning under uncertainty. However, its computational complexity grows exponentially with the planning horizon. We propose to use temporally-extended macro-actions to cut down the effective planning horizon and thus the exponential factor of the complexity. We propose Macro-Action Generator-Critic (MAGIC), an algorithm that learns a macro-action generator from data, and uses the learned macro-actions to perform long-horizon planning. MAGIC learns the generator using experience provided by an online planner, and in-turn conditions the planner using the generated macro-actions. We evaluate MAGIC on several long-term planning tasks, showing that it significantly outperforms planning using primitive actions, hand-crafted macro-actions, as well as naive reinforcement learning in both simulation and on a real robot.
SUMMIT: A Simulator for Urban Driving in Massive Mixed Traffic
Nov 11, 2019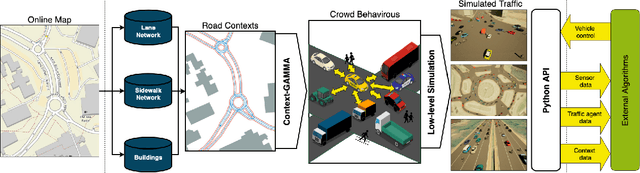
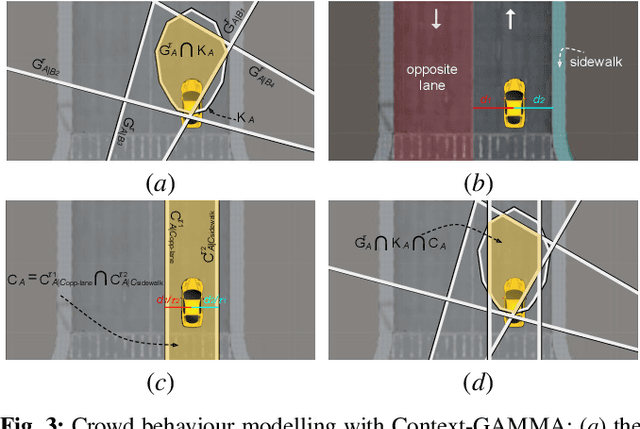
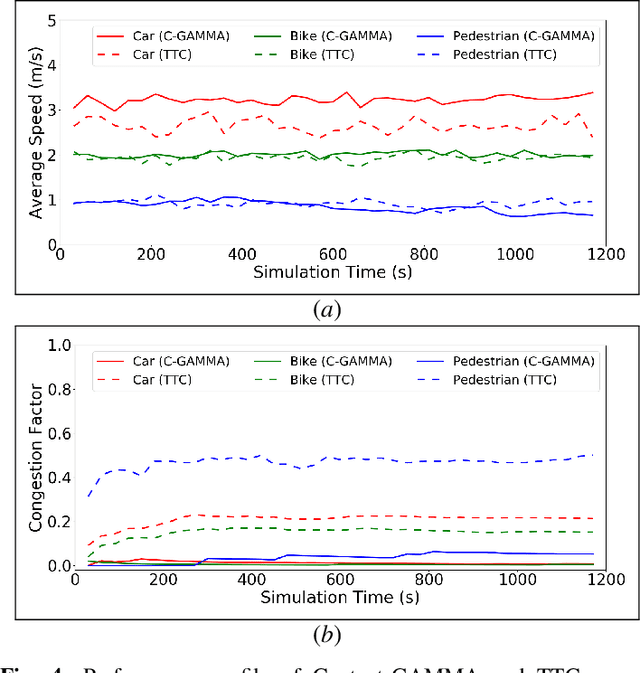
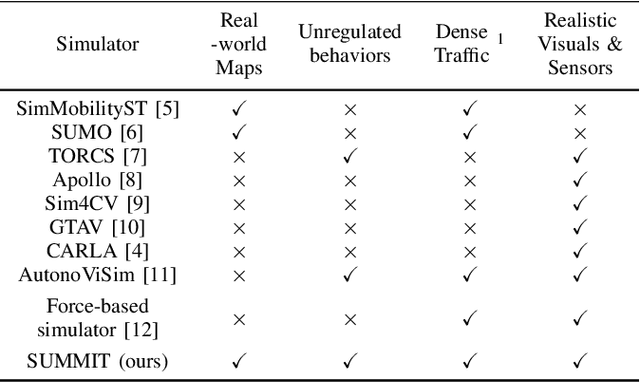
Autonomous driving in an unregulated urban crowd is an outstanding challenge, especially, in the presence of many aggressive, high-speed traffic participants. This paper presents SUMMIT, a high-fidelity simulator that facilitates the development and testing of crowd-driving algorithms. By leveraging the open-source OpenStreetMap map database and a heterogeneous multi-agent motion prediction model developed in our earlier work, SUMMIT simulates dense, unregulated urban traffic for heterogeneous agents at any worldwide locations that OpenStreetMap supports. SUMMIT is built as an extension of CARLA and inherits from it the physical and visual realism for autonomous driving simulation. SUMMIT supports a wide range of applications, including perception, vehicle control, planning, and end-to-end learning. We provide a context-aware planner together with benchmark scenarios and show that SUMMIT generates complex, realistic traffic behaviors in challenging crowd-driving settings.