 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulating Autonomous Driving in Massive Mixed Urban Traffic
Nov 11, 2020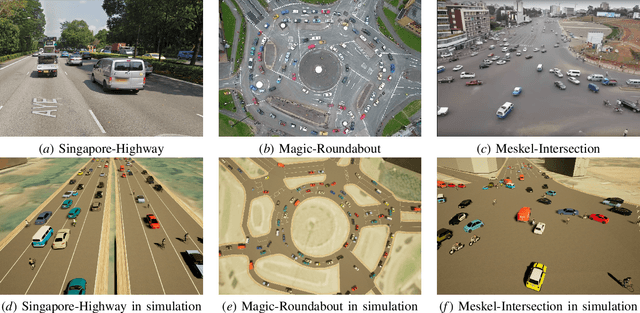
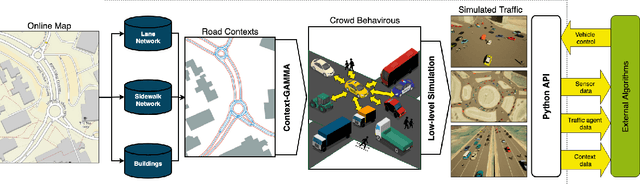
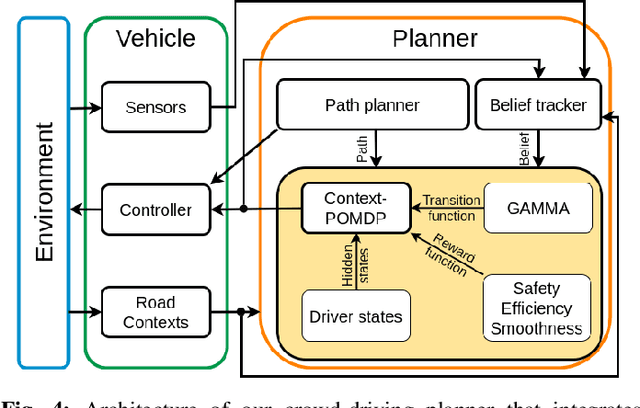
Autonomous driving in an unregulated urban crowd is an outstanding challenge, especially, in the presence of many aggressive, high-speed traffic participants. This paper presents SUMMIT, a high-fidelity simulator that facilitates the development and testing of crowd-driving algorithms. SUMMIT simulates dense, unregulated urban traffic at any worldwide locations as supported by the OpenStreetMap. The core of SUMMIT is a multi-agent motion model, GAMMA, that models the behaviours of heterogeneous traffic agents, and a real-time POMDP planner, Context-POMDP, that serves as a driving expert. SUMMIT is built as an extension of CARLA and inherits from it the physical and visual realism for autonomous driving simulation. SUMMIT supports a wide range of applications, including perception, vehicle control or planning, and end-to-end learning. We validate the realism of our motion model using its traffic motion prediction accuracy on various real-world data sets. We also provide several real-world benchmark scenarios to show that SUMMIT simulates complex, realistic traffic behaviors, and Context-POMDP drives safely and efficiently in challenging crowd-driving settings.
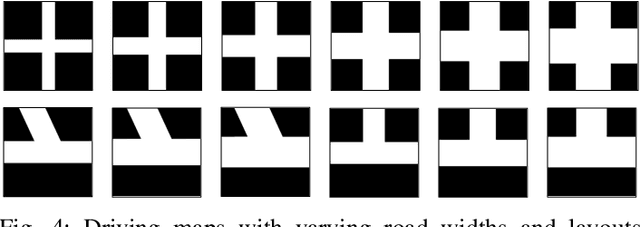
SUMMIT: A Simulator for Urban Driving in Massive Mixed Traffic
Nov 11, 2019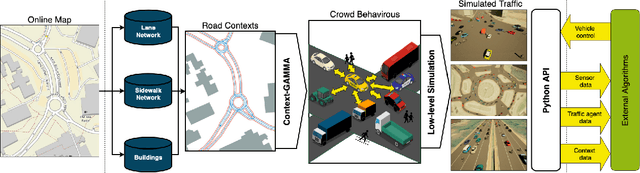
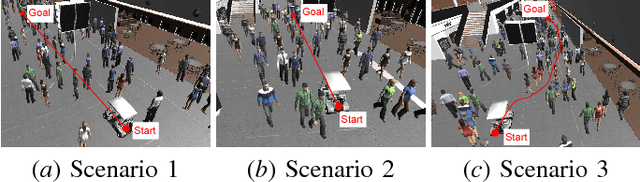
Autonomous driving in an unregulated urban crowd is an outstanding challenge, especially, in the presence of many aggressive, high-speed traffic participants. This paper presents SUMMIT, a high-fidelity simulator that facilitates the development and testing of crowd-driving algorithms. By leveraging the open-source OpenStreetMap map database and a heterogeneous multi-agent motion prediction model developed in our earlier work, SUMMIT simulates dense, unregulated urban traffic for heterogeneous agents at any worldwide locations that OpenStreetMap supports. SUMMIT is built as an extension of CARLA and inherits from it the physical and visual realism for autonomous driving simulation. SUMMIT supports a wide range of applications, including perception, vehicle control, planning, and end-to-end learning. We provide a context-aware planner together with benchmark scenarios and show that SUMMIT generates complex, realistic traffic behaviors in challenging crowd-driving settings.
GAMMA: A General Agent Motion Prediction Model for Autonomous Driving
Jun 04, 2019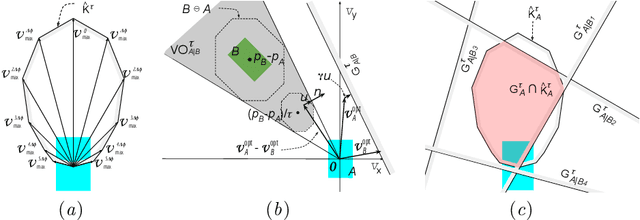

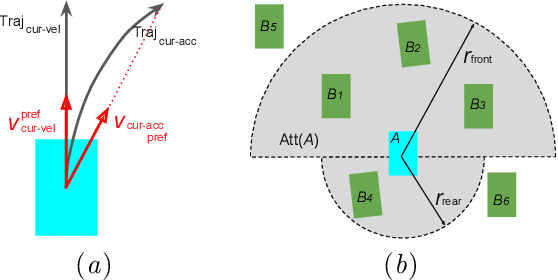

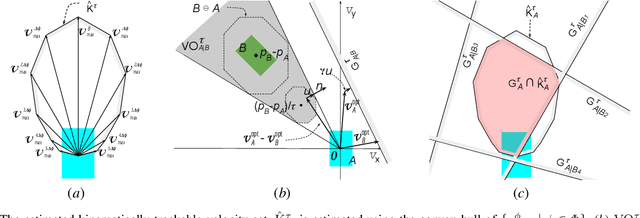
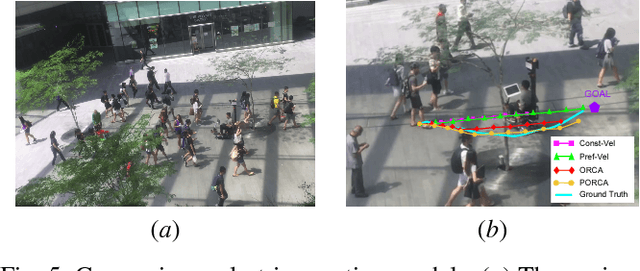
Autonomous driving in mixed traffic requires reliable motion prediction of nearby traffic agents such as pedestrians, bicycles, cars, buses, etc.. This prediction problem is extremely challenging because of the diverse dynamics and geometry of traffic agents, complex road conditions, and intensive interactions between them. In this paper, we proposed GAMMA, a general agent motion prediction model for autonomous driving, that can predict the motion of heterogeneous traffic agents with different kinematics, geometry, etc., and generate multiple hypotheses of trajectories by inferring about human agents' inner states. GAMMA formalizes motion prediction as a geometric optimization problem in the velocity space, and integrates physical constraints and human inner states into this unified framework. Our results show that GAMMA outperforms both traditional and deep learning approaches significantly on diverse real-world datasets.
LeTS-Drive: Driving in a Crowd by Learning from Tree Search
May 29, 2019


Autonomous driving in a crowded environment, e.g., a busy traffic intersection, is an unsolved challenge for robotics. The robot vehicle must contend with a dynamic and partially observable environment, noisy sensors, and many agents. A principled approach is to formalize it as a Partially Observable Markov Decision Process (POMDP) and solve it through online belief-tree search. To handle a large crowd and achieve real-time performance in this very challenging setting, we propose LeTS-Drive, which integrates online POMDP planning and deep learning. It consists of two phases. In the offline phase, we learn a policy and the corresponding value function by imitating the belief tree search. In the online phase, the learned policy and value function guide the belief tree search. LeTS-Drive leverages the robustness of planning and the runtime efficiency of learning to enhance the performance of both. Experimental results in simulation show that LeTS-Drive outperforms either planning or imitation learning alone and develops sophisticated driving skills.
PORCA: Modeling and Planning for Autonomous Driving among Many Pedestrians
Jul 01, 2018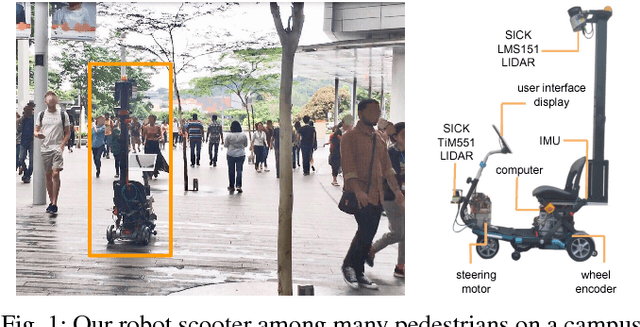
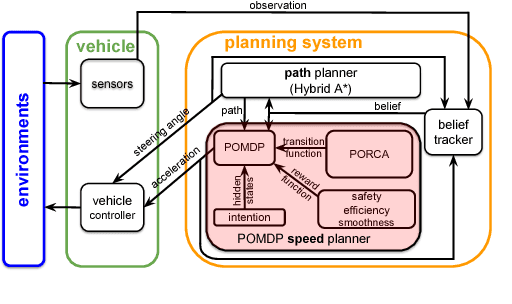
This paper presents a planning system for autonomous driving among many pedestrians. A key ingredient of our approach is PORCA, a pedestrian motion prediction model that accounts for both a pedestrian's global navigation intention and local interactions with the vehicle and other pedestrians. Unfortunately, the autonomous vehicle does not know the pedestrian's intention a priori and requires a planning algorithm that hedges against the uncertainty in pedestrian intentions. Our planning system combines a POMDP algorithm with the pedestrian motion model and runs in near real time. Experiments show that it enables a robot vehicle to drive safely, efficiently, and smoothly among a crowd with a density of nearly one person per square meter.
HyP-DESPOT: A Hybrid Parallel Algorithm for Online Planning under Uncertainty
Feb 17, 2018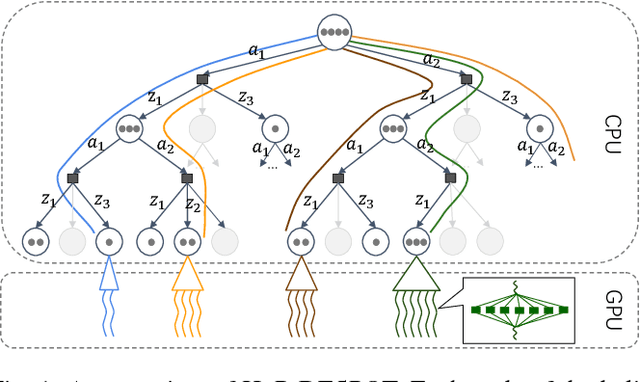

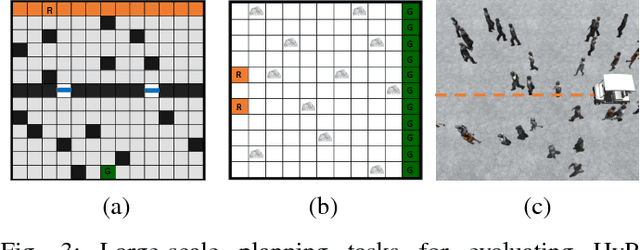
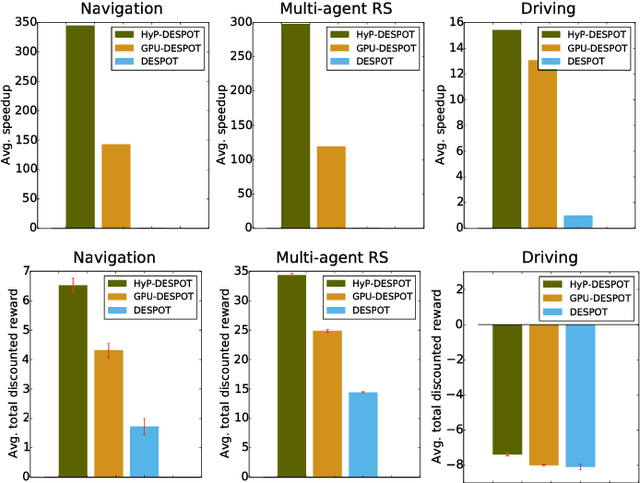
Planning under uncertainty is critical for robust robot performance in uncertain, dynamic environments, but it incurs high computational cost. State-of-the-art online search algorithms, such as DESPOT, have vastly improved the computational efficiency of planning under uncertainty and made it a valuable tool for robotics in practice. This work takes one step further by leveraging both CPU and GPU parallelization in order to achieve near real-time online planning performance for complex tasks with large state, action, and observation spaces. Specifically, we propose Hybrid Parallel DESPOT (HyP-DESPOT), a massively parallel online planning algorithm that integrates CPU and GPU parallelism in a multi-level scheme. It performs parallel DESPOT tree search by simultaneously traversing multiple independent paths using multi-core CPUs and performs parallel Monte-Carlo simulations at the leaf nodes of the search tree using GPUs. Experimental results show that HyP-DESPOT speeds up online planning by up to several hundred times, compared with the original DESPOT algorithm, in several challenging robotic tasks in simulation.