Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePORCA: Modeling and Planning for Autonomous Driving among Many Pedestrians
Paper and Code
Jul 01, 2018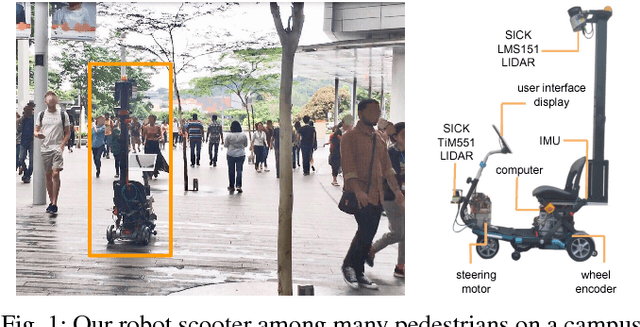
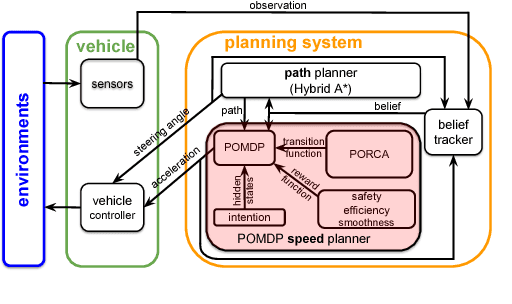
This paper presents a planning system for autonomous driving among many pedestrians. A key ingredient of our approach is PORCA, a pedestrian motion prediction model that accounts for both a pedestrian's global navigation intention and local interactions with the vehicle and other pedestrians. Unfortunately, the autonomous vehicle does not know the pedestrian's intention a priori and requires a planning algorithm that hedges against the uncertainty in pedestrian intentions. Our planning system combines a POMDP algorithm with the pedestrian motion model and runs in near real time. Experiments show that it enables a robot vehicle to drive safely, efficiently, and smoothly among a crowd with a density of nearly one person per square meter.
View paper on