 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRisk-aware Integrated Task and Motion Planning for Versatile Snake Robots under Localization Failures
Feb 27, 2025



Snake robots enable mobility through extreme terrains and confined environments in terrestrial and space applications. However, robust perception and localization for snake robots remain an open challenge due to the proximity of the sensor payload to the ground coupled with a limited field of view. To address this issue, we propose Blind-motion with Intermittently Scheduled Scans (BLISS) which combines proprioception-only mobility with intermittent scans to be resilient against both localization failures and collision risks. BLISS is formulated as an integrated Task and Motion Planning (TAMP) problem that leads to a Chance-Constrained Hybrid Partially Observable Markov Decision Process (CC-HPOMDP), known to be computationally intractable due to the curse of history. Our novelty lies in reformulating CC-HPOMDP as a tractable, convex Mixed Integer Linear Program. This allows us to solve BLISS-TAMP significantly faster and jointly derive optimal task-motion plans. Simulations and hardware experiments on the EELS snake robot show our method achieves over an order of magnitude computational improvement compared to state-of-the-art POMDP planners and $>$ 50\% better navigation time optimality versus classical two-stage planners.
Task and Motion Informed Trees : Almost-Surely Asymptotically Optimal Integrated Task and Motion Planning
Oct 17, 2022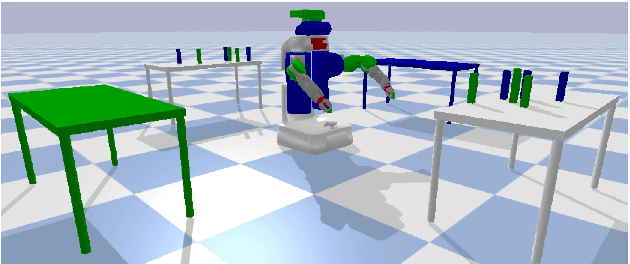
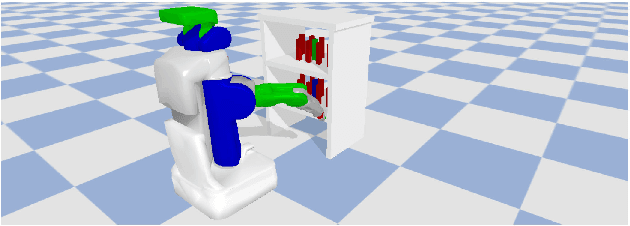
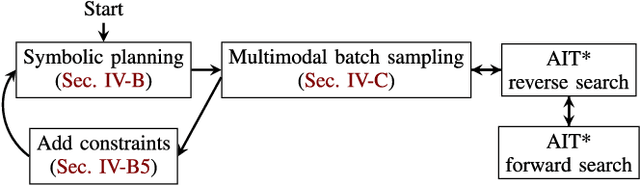

High-level autonomy requires discrete and continuous reasoning to decide both what actions to take and how to execute them. Integrated Task and Motion Planning (TMP) algorithms solve these hybrid problems jointly to consider constraints between the discrete symbolic actions (i.e., the task plan) and their continuous geometric realization (i.e., motion plans). This joint approach solves more difficult problems than approaches that address the task and motion subproblems independently. TMP algorithms combine and extend results from both task and motion planning. TMP has mainly focused on computational performance and completeness and less on solution optimality. Optimal TMP is difficult because the independent optima of the subproblems may not be the optimal integrated solution, which can only be found by jointly optimizing both plans. This paper presents Task and Motion Informed Trees (TMIT*), an optimal TMP algorithm that combines results from makespan-optimal task planning and almost-surely asymptotically optimal motion planning. TMIT* interleaves asymmetric forward and reverse searches to delay computationally expensive operations until necessary and perform an efficient informed search directly in the problem's hybrid state space. This allows it to solve problems quickly and then converge towards the optimal solution with additional computational time, as demonstrated on the evaluated robotic-manipulation benchmark problems.
* 9 pages, 5 figures. Accepted to IEEE RA-L and IROS 2022
Effort Informed Roadmaps (EIRM*): Efficient Asymptotically Optimal Multiquery Planning by Actively Reusing Validation Effort
May 17, 2022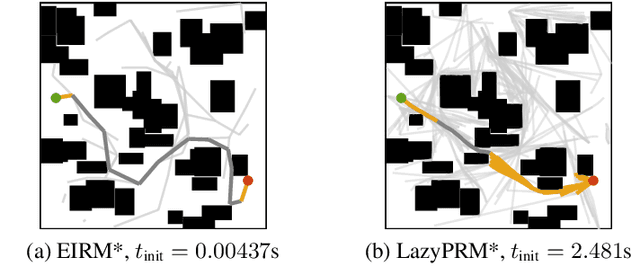
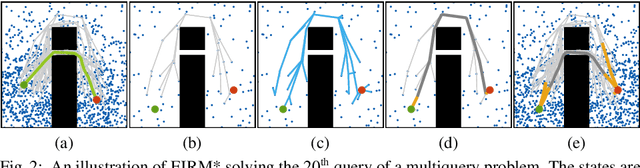
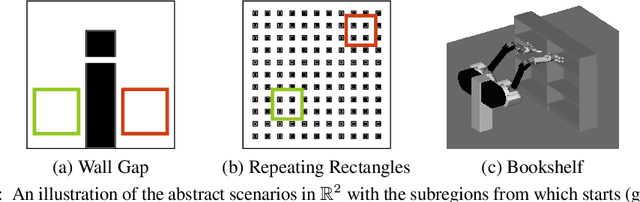
Multiquery planning algorithms find paths between various different starts and goals in a single search space. They are designed to do so efficiently by reusing information across planning queries. This information may be computed before or during the search and often includes knowledge of valid paths. Using known valid paths to solve an individual planning query takes less computational effort than finding a completely new solution. This allows multiquery algorithms, such as PRM*, to outperform single-query algorithms, such as RRT*, on many problems but their relative performance depends on how much information is reused. Despite this, few multiquery planners explicitly seek to maximize path reuse and, as a result, many do not consistently outperform single-query alternatives. This paper presents Effort Informed Roadmaps (EIRM*), an almost-surely asymptotically optimal multiquery planning algorithm that explicitly prioritizes reusing computational effort. EIRM* uses an asymmetric bidirectional search to identify existing paths that may help solve an individual planning query and then uses this information to order its search and reduce computational effort. This allows it to find initial solutions up to an order-of-magnitude faster than state-of-the-art planning algorithms on the tested abstract and robotic multiquery planning problems.
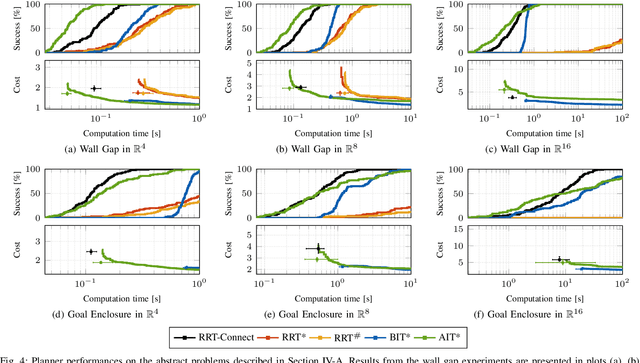
AIT* and EIT*: Asymmetric bidirectional sampling-based path planning
Nov 02, 2021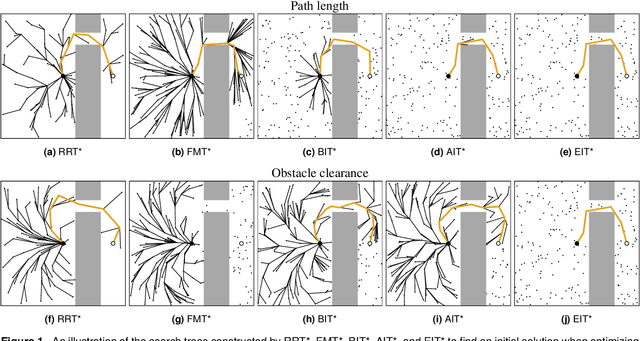
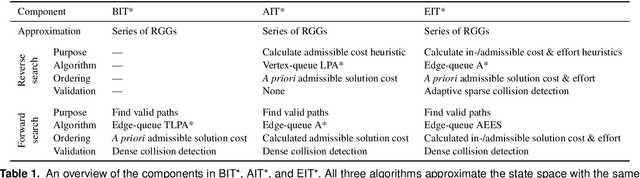
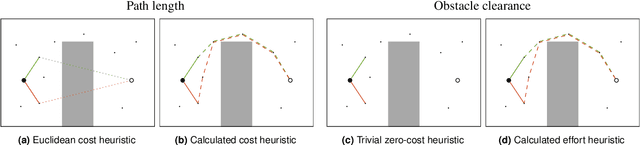
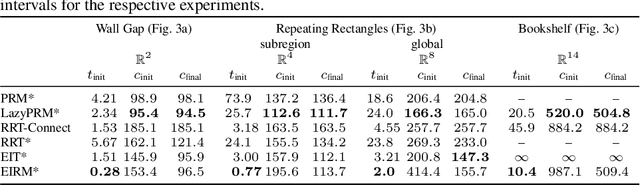
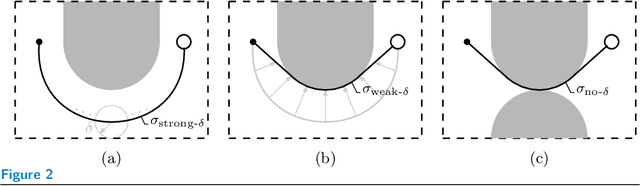
Optimal path planning is the problem of finding a valid sequence of states between a start and goal that optimizes an objective. Informed path planning algorithms order their search with problem-specific knowledge expressed as heuristics and can be orders of magnitude more efficient than uninformed algorithms. Heuristics are most effective when they are both accurate and computationally inexpensive to evaluate, but these are often conflicting characteristics. This makes the selection of appropriate heuristics difficult for many problems. This paper presents two almost-surely asymptotically optimal sampling-based path planning algorithms to address this challenge, Adaptively Informed Trees (AIT*) and Effort Informed Trees (EIT*). These algorithms use an asymmetric bidirectional search in which both searches continuously inform each other. This allows AIT* and EIT* to improve planning performance by simultaneously calculating and exploiting increasingly accurate, problem-specific heuristics. The benefits of AIT* and EIT* relative to other sampling-based algorithms are demonstrated on twelve problems in abstract, robotic, and biomedical domains optimizing path length and obstacle clearance. The experiments show that AIT* and EIT* outperform other algorithms on problems optimizing obstacle clearance, where a priori cost heuristics are often ineffective, and still perform well on problems minimizing path length, where such heuristics are often effective.
Admissible heuristics for obstacle clearance optimization objectives
May 01, 2021
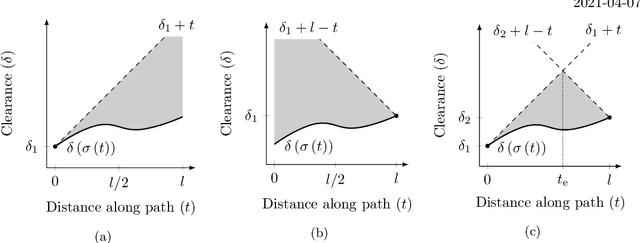
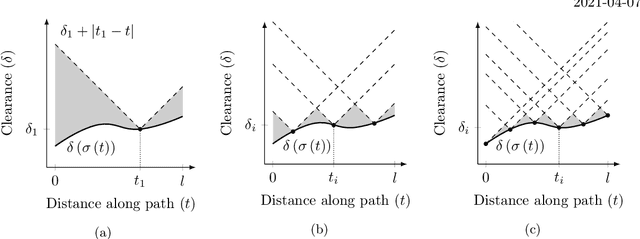
Obstacle clearance in state space is an important optimization objective in path planning because it can result in safe paths. This technical report presents admissible solution- and path-cost heuristics for this objective, which can be used to improve the performance of informed path planning algorithms.
A Survey of Asymptotically Optimal Sampling-based Motion Planning Methods
Sep 22, 2020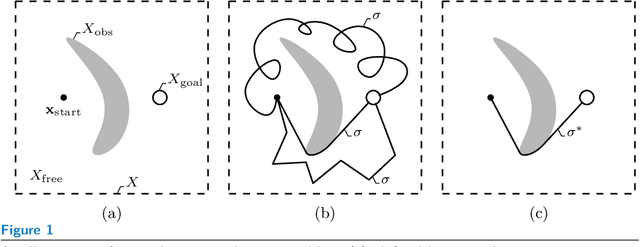
Motion planning is a fundamental problem in autonomous robotics. It requires finding a path to a specified goal that avoids obstacles and obeys a robot's limitations and constraints. It is often desirable for this path to also optimize a cost function, such as path length. Formal path-quality guarantees for continuously valued search spaces are an active area of research interest. Recent results have proven that some sampling-based planning methods probabilistically converge towards the optimal solution as computational effort approaches infinity. This survey summarizes the assumptions behind these popular asymptotically optimal techniques and provides an introduction to the significant ongoing research on this topic.
Adaptively Informed Trees (AIT*): Fast Asymptotically Optimal Path Planning through Adaptive Heuristics
Mar 05, 2020


Informed sampling-based planning algorithms exploit problem knowledge for better search performance. This knowledge is often expressed as heuristic estimates of solution cost and used to order the search. The practical improvement of this informed search depends on the accuracy of the heuristic. Selecting an appropriate heuristic is difficult. Heuristics applicable to an entire problem domain are often simple to define and inexpensive to evaluate but may not be beneficial for a specific problem instance. Heuristics specific to a problem instance are often difficult to define or expensive to evaluate but can make the search itself trivial. This paper presents Adaptively Informed Trees (AIT*), an almost-surely asymptotically optimal sampling-based planner based on BIT*. AIT* adapts its search to each problem instance by using an asymmetric bidirectional search to simultaneously estimate and exploit a problem-specific heuristic. This allows it to quickly find initial solutions and converge towards the optimum. AIT* solves the tested problems as fast as RRT-Connect while also converging towards the optimum.
Advanced BIT* (ABIT*): Sampling-Based Planning with Advanced Graph-Search Techniques
Feb 16, 2020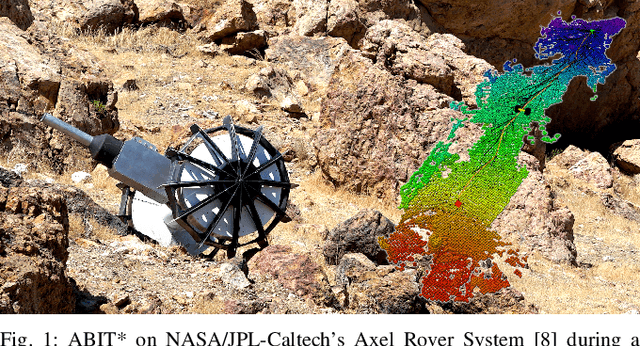
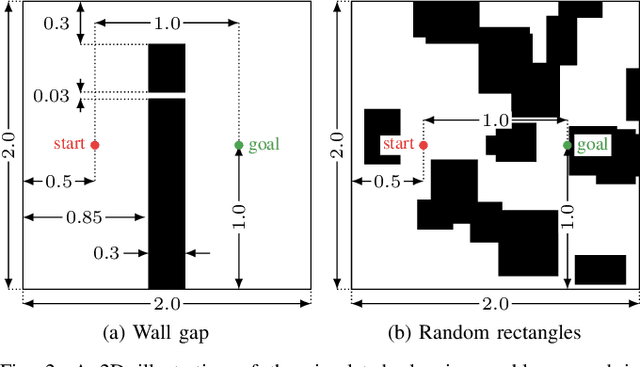
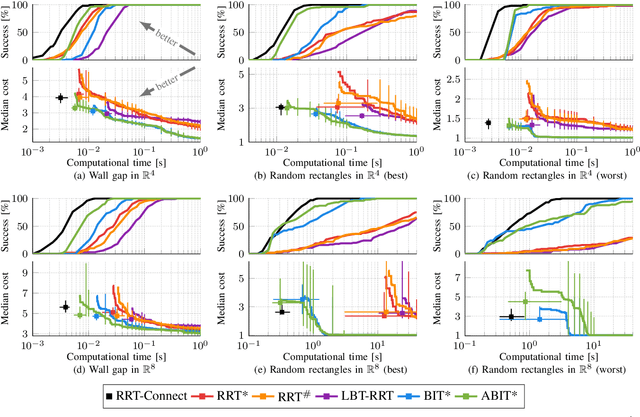
Path planning is an active area of research essential for many applications in robotics. Popular techniques include graph-based searches and sampling-based planners. These approaches are powerful but have limitations. This paper continues work to combine their strengths and mitigate their limitations using a unified planning paradigm. It does this by viewing the path planning problem as the two subproblems of search and approximation and using advanced graph-search techniques on a sampling-based approximation. This perspective leads to Advanced BIT*. ABIT* combines truncated anytime graph-based searches, such as ATD*, with anytime almost-surely asymptotically optimal sampling-based planners, such as RRT*. This allows it to quickly find initial solutions and then converge towards the optimum in an anytime manner. ABIT* outperforms existing single-query, sampling-based planners on the tested problems in $\mathbb{R}^{4}$ and $\mathbb{R}^{8}$, and was demonstrated on real-world problems with NASA/JPL-Caltech.