Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdmissible heuristics for obstacle clearance optimization objectives
Paper and Code
May 01, 2021
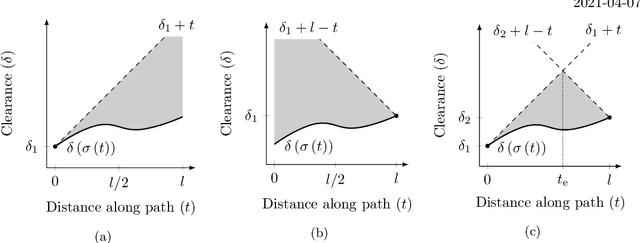
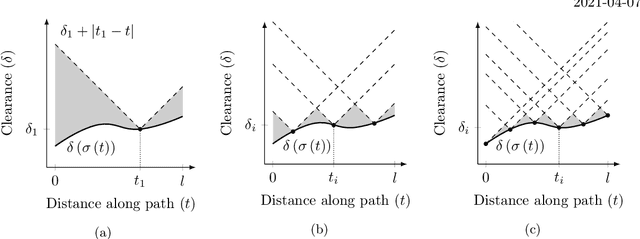
Obstacle clearance in state space is an important optimization objective in path planning because it can result in safe paths. This technical report presents admissible solution- and path-cost heuristics for this objective, which can be used to improve the performance of informed path planning algorithms.
* 6 pages, 3 figures
View paper on