 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRisk-aware Integrated Task and Motion Planning for Versatile Snake Robots under Localization Failures
Feb 27, 2025



Snake robots enable mobility through extreme terrains and confined environments in terrestrial and space applications. However, robust perception and localization for snake robots remain an open challenge due to the proximity of the sensor payload to the ground coupled with a limited field of view. To address this issue, we propose Blind-motion with Intermittently Scheduled Scans (BLISS) which combines proprioception-only mobility with intermittent scans to be resilient against both localization failures and collision risks. BLISS is formulated as an integrated Task and Motion Planning (TAMP) problem that leads to a Chance-Constrained Hybrid Partially Observable Markov Decision Process (CC-HPOMDP), known to be computationally intractable due to the curse of history. Our novelty lies in reformulating CC-HPOMDP as a tractable, convex Mixed Integer Linear Program. This allows us to solve BLISS-TAMP significantly faster and jointly derive optimal task-motion plans. Simulations and hardware experiments on the EELS snake robot show our method achieves over an order of magnitude computational improvement compared to state-of-the-art POMDP planners and $>$ 50\% better navigation time optimality versus classical two-stage planners.
Copiloting Autonomous Multi-Robot Missions: A Game-inspired Supervisory Control Interface
Apr 13, 2022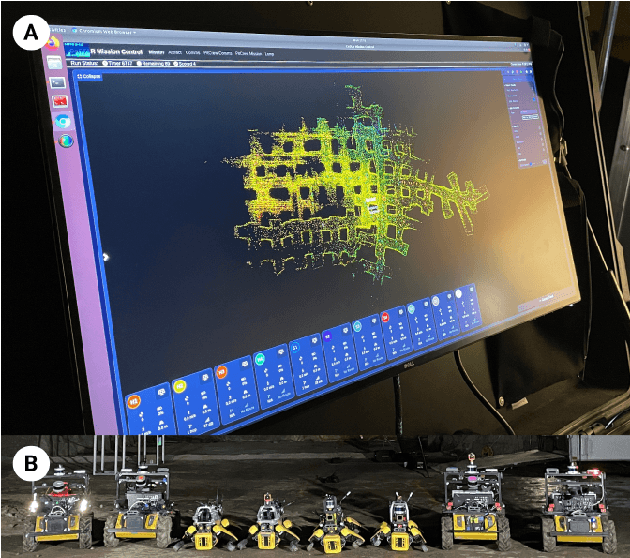
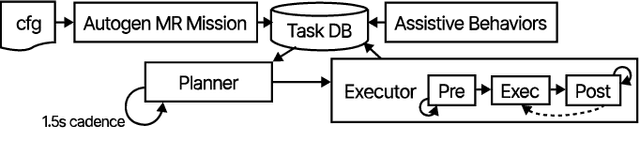
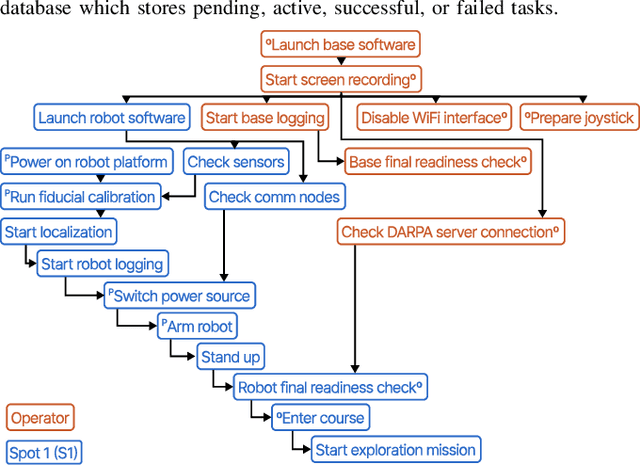
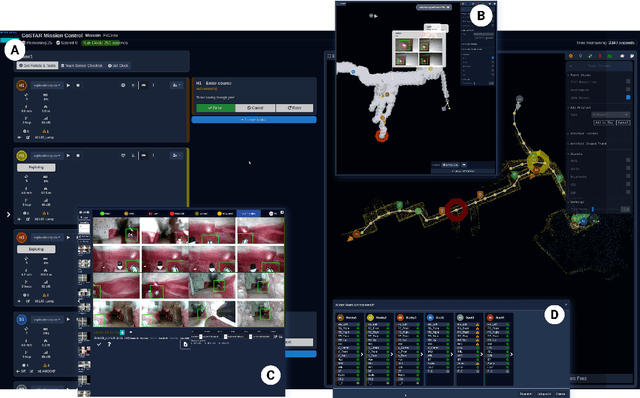
Real-world deployment of new technology and capabilities can be daunting. The recent DARPA Subterranean (SubT) Challenge, for instance, aimed at the advancement of robotic platforms and autonomy capabilities in three one-year development pushes. While multi-agent systems are traditionally deployed in controlled and structured environments that allow for controlled testing (e.g., warehouses), the SubT challenge targeted various types of unknown underground environments that imposed the risk of robot loss in the case of failure. In this work, we introduce a video game-inspired interface, an autonomous mission assistant, and test and deploy these using a heterogeneous multi-agent system in challenging environments. This work leads to improved human-supervisory control for a multi-agent system reducing overhead from application switching, task planning, execution, and verification while increasing available exploration time with this human-autonomy teaming platform.