 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Addendum to NeBula: Towards Extending TEAM CoSTAR's Solution to Larger Scale Environments
Apr 18, 2025This paper presents an appendix to the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the DARPA Subterranean Challenge. Specifically, this paper presents extensions to NeBula's hardware, software, and algorithmic components that focus on increasing the range and scale of the exploration environment. From the algorithmic perspective, we discuss the following extensions to the original NeBula framework: (i) large-scale geometric and semantic environment mapping; (ii) an adaptive positioning system; (iii) probabilistic traversability analysis and local planning; (iv) large-scale POMDP-based global motion planning and exploration behavior; (v) large-scale networking and decentralized reasoning; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions. We demonstrate the application and deployment of the presented systems and solutions in various large-scale underground environments, including limestone mine exploration scenarios as well as deployment in the DARPA Subterranean challenge.
ACHORD: Communication-Aware Multi-Robot Coordination with Intermittent Connectivity
Jun 05, 2022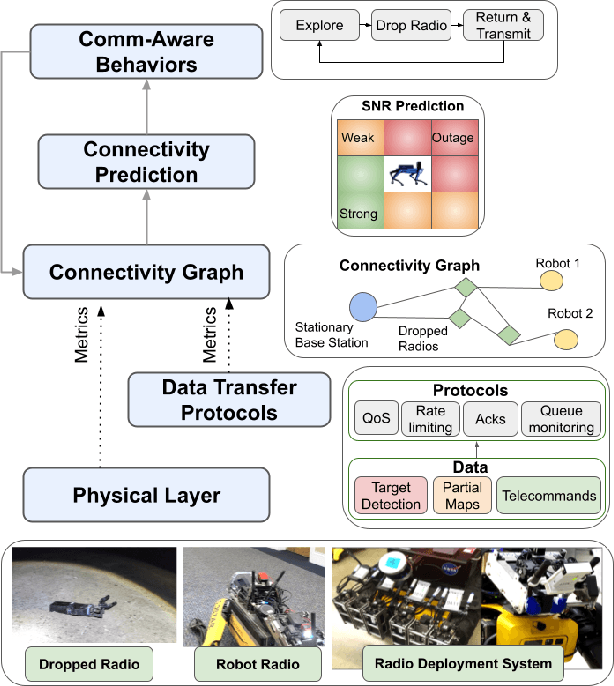
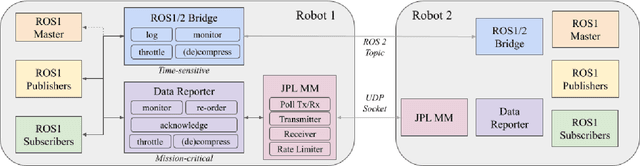
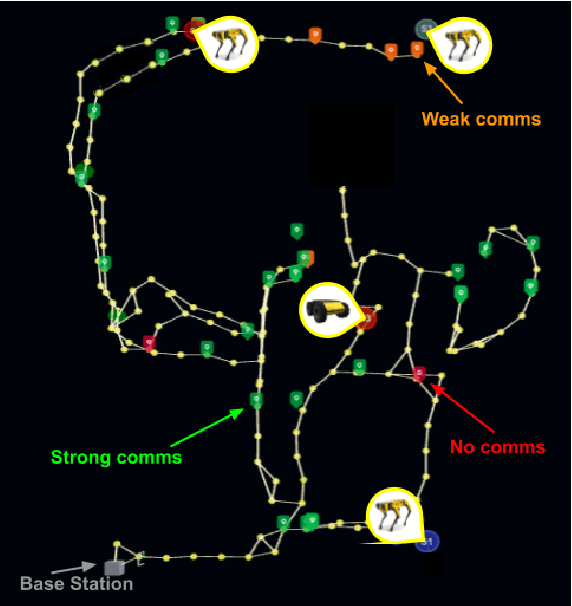
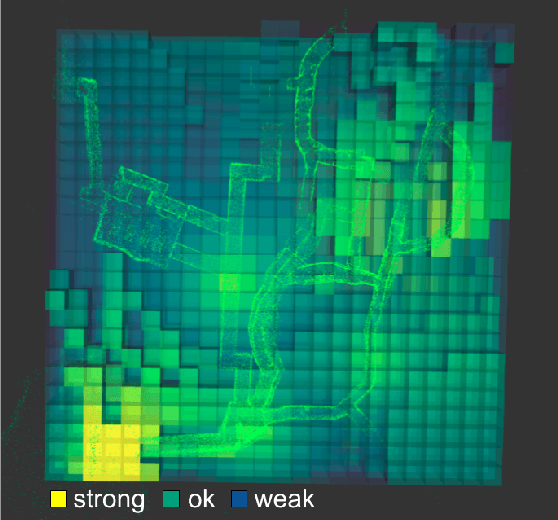
Communication is an important capability for multi-robot exploration because (1) inter-robot communication (comms) improves coverage efficiency and (2) robot-to-base comms improves situational awareness. Exploring comms-restricted (e.g., subterranean) environments requires a multi-robot system to tolerate and anticipate intermittent connectivity, and to carefully consider comms requirements, otherwise mission-critical data may be lost. In this paper, we describe and analyze ACHORD (Autonomous & Collaborative High-Bandwidth Operations with Radio Droppables), a multi-layer networking solution which tightly co-designs the network architecture and high-level decision-making for improved comms. ACHORD provides bandwidth prioritization and timely and reliable data transfer despite intermittent connectivity. Furthermore, it exposes low-layer networking metrics to the application layer to enable robots to autonomously monitor, map, and extend the network via droppable radios, as well as restore connectivity to improve collaborative exploration. We evaluate our solution with respect to the comms performance in several challenging underground environments including the DARPA SubT Finals competition environment. Our findings support the use of data stratification and flow control to improve bandwidth-usage.
Copiloting Autonomous Multi-Robot Missions: A Game-inspired Supervisory Control Interface
Apr 13, 2022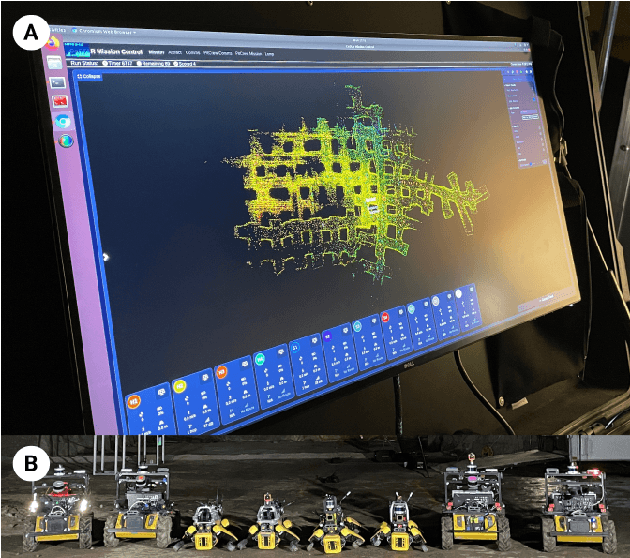
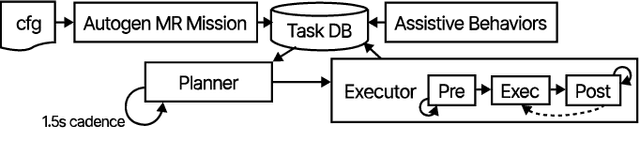
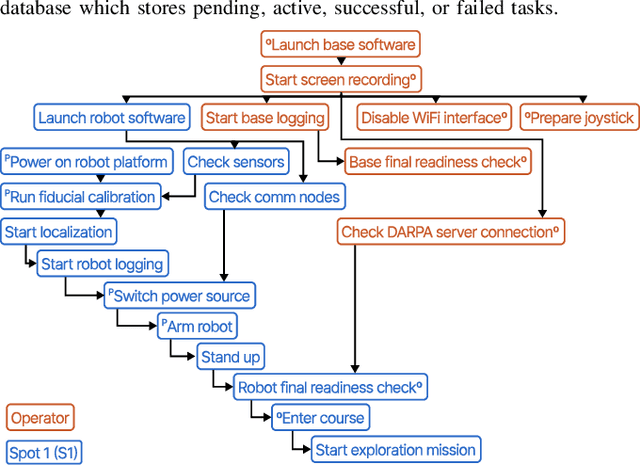
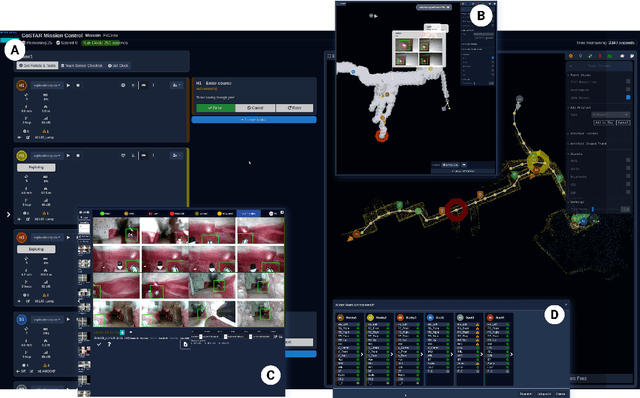
Real-world deployment of new technology and capabilities can be daunting. The recent DARPA Subterranean (SubT) Challenge, for instance, aimed at the advancement of robotic platforms and autonomy capabilities in three one-year development pushes. While multi-agent systems are traditionally deployed in controlled and structured environments that allow for controlled testing (e.g., warehouses), the SubT challenge targeted various types of unknown underground environments that imposed the risk of robot loss in the case of failure. In this work, we introduce a video game-inspired interface, an autonomous mission assistant, and test and deploy these using a heterogeneous multi-agent system in challenging environments. This work leads to improved human-supervisory control for a multi-agent system reducing overhead from application switching, task planning, execution, and verification while increasing available exploration time with this human-autonomy teaming platform.
Motion Planning for Collision-resilient Mobile Robots in Obstacle-cluttered Unknown Environments with Risk Reward Trade-offs
Sep 04, 2020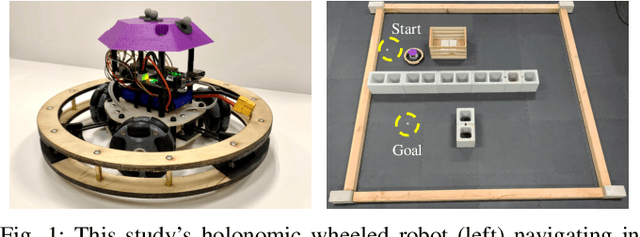
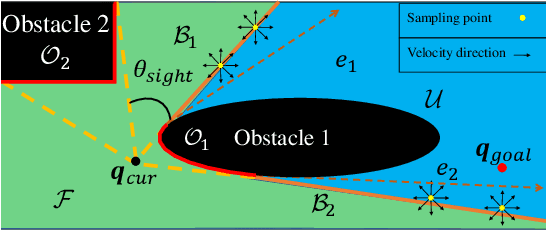
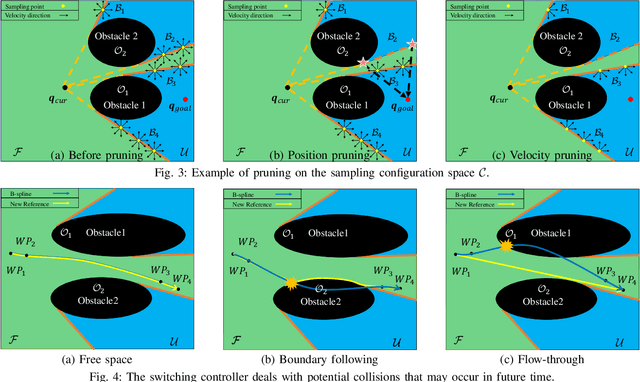
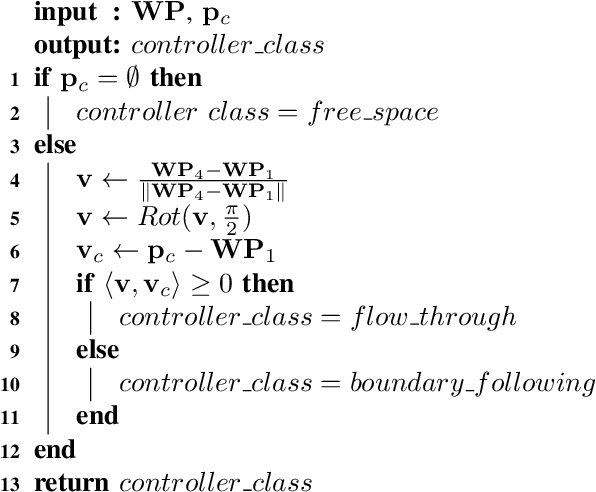
Collision avoidance in unknown obstacle-cluttered environments may not always be feasible. This paper focuses on an emerging paradigm shift in which potential collisions with the environment can be harnessed instead of being avoided altogether. To this end, we introduce a new sampling-based online planning algorithm that can explicitly handle the risk of colliding with the environment and can switch between collision avoidance and collision exploitation. Central to the planner's capabilities is a novel joint optimization function that evaluates the effect of possible collisions using a reflection model. This way, the planner can make deliberate decisions to collide with the environment if such collision is expected to help the robot make progress toward its goal. To make the algorithm online, we present a state expansion pruning technique that significantly reduces the search space while ensuring completeness. The proposed algorithm is evaluated experimentally with a built-in-house holonomic wheeled robot that can withstand collisions. We perform an extensive parametric study to investigate trade-offs between (user-tuned) levels of risk, deliberate collision decision making, and trajectory statistics such as time to reach the goal and path length.
Development and Testing of a Novel Automated Insect Capture Module for Sample Collection and Transfer
Aug 29, 2020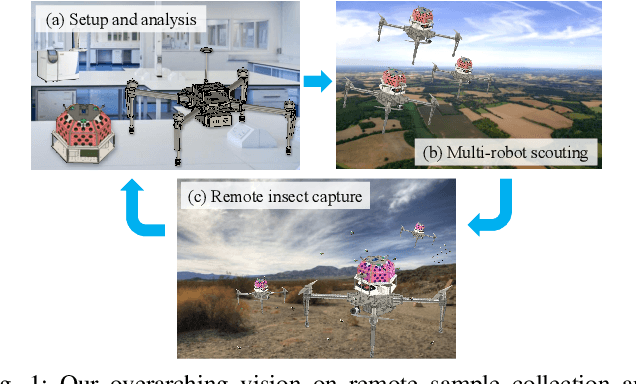
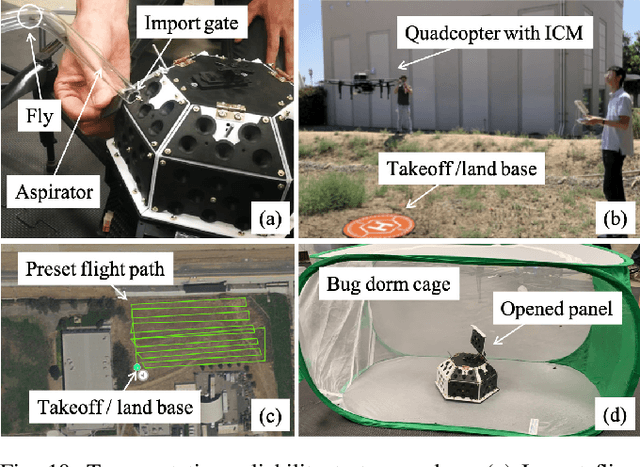
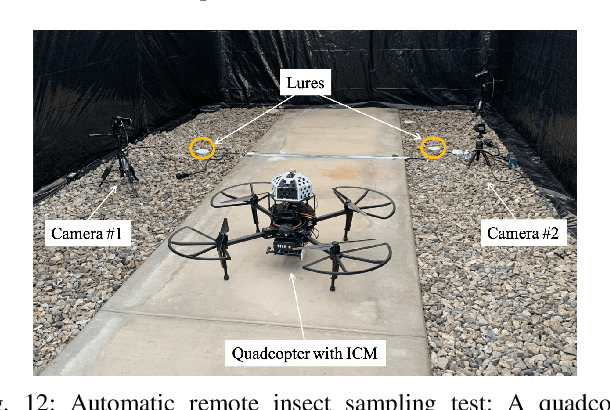
There exists an urgent need for efficient tools in disease surveillance to help model and predict the spread of disease. The transmission of insect-borne diseases poses a serious concern to public health officials and the medical and research community at large. In the modeling of this spread, we face bottlenecks in (1) the frequency at which we are able to sample insect vectors in environments that are prone to propagating disease, (2) manual labor needed to set up and retrieve surveillance devices like traps, and (3) the return time in analyzing insect samples and determining if an infectious disease is spreading in a region. To help address these bottlenecks, we present in this paper the design, fabrication, and testing of a novel automated insect capture module (ICM) or trap that aims to improve the rate of transferring samples collected from the environment via aerial robots. The ICM features an ultraviolet light attractant, passive capture mechanism, panels which can open and close for access to insects, and a small onboard computer for automated operation and data logging. At the same time, the ICM is designed to be accessible; it is small-scale, lightweight and low-cost, and can be integrated with commercially available aerial robots. Indoor and outdoor experimentation validates ICM's feasibility in insect capturing and safe transportation. The device can help bring us one step closer toward achieving fully autonomous and scalable epidemiology by leveraging autonomous robots technology to aid the medical and research community.