 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Robot Decentralized Collaborative SLAM in Planetary Analogue Environments: Dataset, Challenges, and Lessons Learned
Jan 28, 2026Decentralized collaborative simultaneous localization and mapping (C-SLAM) is essential to enable multirobot missions in unknown environments without relying on preexisting localization and communication infrastructure. This technology is anticipated to play a key role in the exploration of the Moon, Mars, and other planets. In this article, we share insights and lessons learned from C-SLAM experiments involving three robots operating on a Mars analogue terrain and communicating over an ad hoc network. We examine the impact of limited and intermittent communication on C-SLAM performance, as well as the unique localization challenges posed by planetary-like environments. Additionally, we introduce a novel dataset collected during our experiments, which includes real-time peer-to-peer inter-robot throughput and latency measurements. This dataset aims to support future research on communication-constrained, decentralized multirobot operations.
Multi-Objective Risk Assessment Framework for Exploration Planning Using Terrain and Traversability Analysis
Oct 04, 2024



Exploration of unknown, unstructured environments, such as in search and rescue, cave exploration, and planetary missions,presents significant challenges due to their unpredictable nature. This unpredictability can lead to inefficient path planning and potential mission failures. We propose a multi-objective risk assessment method for exploration planning in such unconstrained environments. Our approach dynamically adjusts the weight of various risk factors to prevent the robot from undertaking lethal actions too early in the mission. By gradually increasing the allowable risk as the mission progresses, our method enables more efficient exploration. We evaluate risk based on environmental terrain properties, including elevation, slope, roughness, and traversability, and account for factors like battery life, mission duration, and travel distance. Our method is validated through experiments in various subterranean simulated cave environments. The results demonstrate that our approach ensures consistent exploration without incurring lethal actions, while introducing minimal computational overhead to the planning process.
Hierarchies define the scalability of robot swarms
May 03, 2024



The emerging behaviors of swarms have fascinated scientists and gathered significant interest in the field of robotics. Traditionally, swarms are viewed as egalitarian, with robots sharing identical roles and capabilities. However, recent findings highlight the importance of hierarchy for deploying robot swarms more effectively in diverse scenarios. Despite nature's preference for hierarchies, the robotics field has clung to the egalitarian model, partly due to a lack of empirical evidence for the conditions favoring hierarchies. Our research demonstrates that while egalitarian swarms excel in environments proportionate to their collective sensing abilities, they struggle in larger or more complex settings. Hierarchical swarms, conversely, extend their sensing reach efficiently, proving successful in larger, more unstructured environments with fewer resources. We validated these concepts through simulations and physical robot experiments, using a complex radiation cleanup task. This study paves the way for developing adaptable, hierarchical swarm systems applicable in areas like planetary exploration and autonomous vehicles. Moreover, these insights could deepen our understanding of hierarchical structures in biological organisms.
From the Lab to the Theater: An Unconventional Field Robotics Journey
Apr 11, 2024Artistic performances involving robotic systems present unique technical challenges akin to those encountered in other field deployments. In this paper, we delve into the orchestration of robotic artistic performances, focusing on the complexities inherent in communication protocols and localization methods. Through our case studies and experimental insights, we demonstrate the breadth of technical requirements for this type of deployment, and, most importantly, the significant contributions of working closely with non-experts.
Energy Sufficiency in Unknown Environments via Control Barrier Functions
Jun 26, 2023Maintaining energy sufficiency of a battery-powered robot system is a essential for long-term missions. This capability should be flexible enough to deal with different types of environment and a wide range of missions, while constantly guaranteeing that the robot does not run out of energy. In this work we present a framework based on Control Barrier Functions (CBFs) that provides an energy sufficiency layer that can be applied on top of any path planner and provides guarantees on the robot's energy consumption during mission execution. In practice, we smooth the output of a generic path planner using double sigmoid functions and then use CBFs to ensure energy sufficiency along the smoothed path, for robots described by single integrator and unicycle kinematics. We present results using a physics-based robot simulator, as well as with real robots with a full localization and mapping stack to show the validity of our approach.
ACHORD: Communication-Aware Multi-Robot Coordination with Intermittent Connectivity
Jun 05, 2022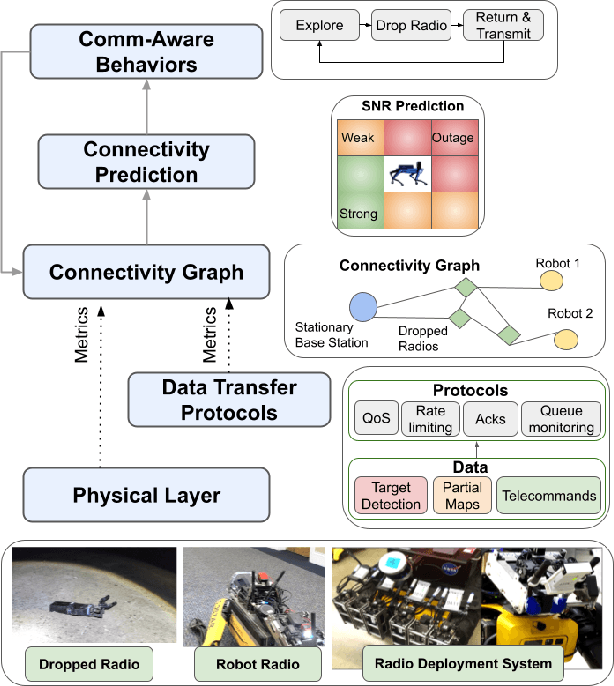
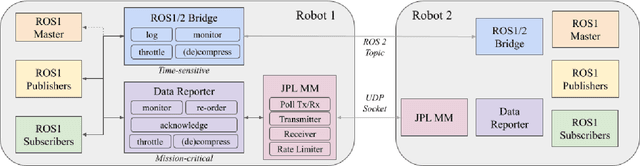
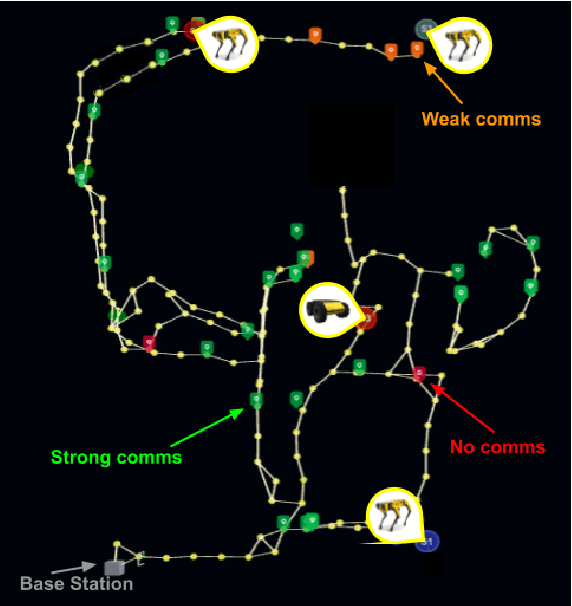
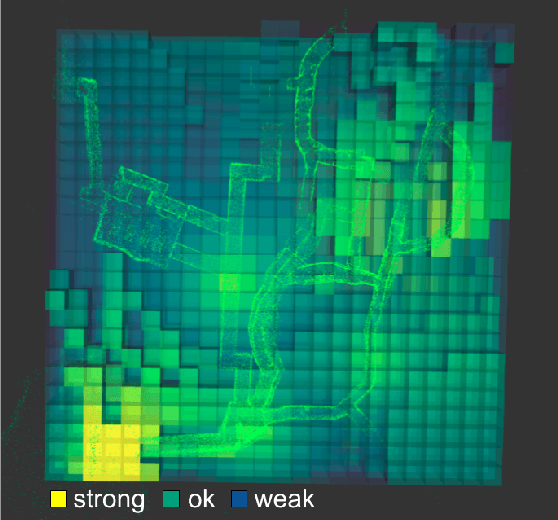
Communication is an important capability for multi-robot exploration because (1) inter-robot communication (comms) improves coverage efficiency and (2) robot-to-base comms improves situational awareness. Exploring comms-restricted (e.g., subterranean) environments requires a multi-robot system to tolerate and anticipate intermittent connectivity, and to carefully consider comms requirements, otherwise mission-critical data may be lost. In this paper, we describe and analyze ACHORD (Autonomous & Collaborative High-Bandwidth Operations with Radio Droppables), a multi-layer networking solution which tightly co-designs the network architecture and high-level decision-making for improved comms. ACHORD provides bandwidth prioritization and timely and reliable data transfer despite intermittent connectivity. Furthermore, it exposes low-layer networking metrics to the application layer to enable robots to autonomously monitor, map, and extend the network via droppable radios, as well as restore connectivity to improve collaborative exploration. We evaluate our solution with respect to the comms performance in several challenging underground environments including the DARPA SubT Finals competition environment. Our findings support the use of data stratification and flow control to improve bandwidth-usage.
Hierarchical Control of Smart Particle Swarms
Apr 14, 2022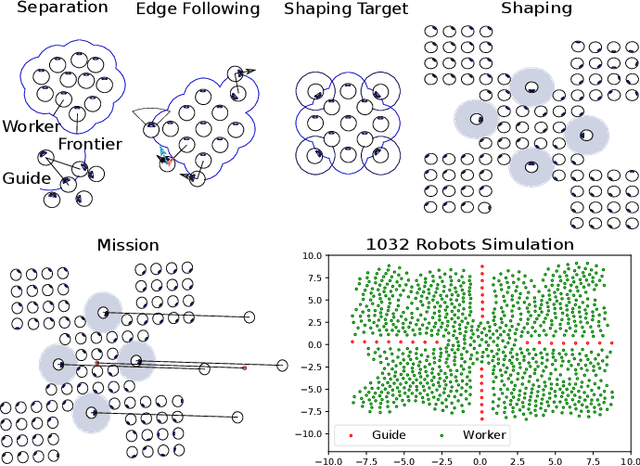
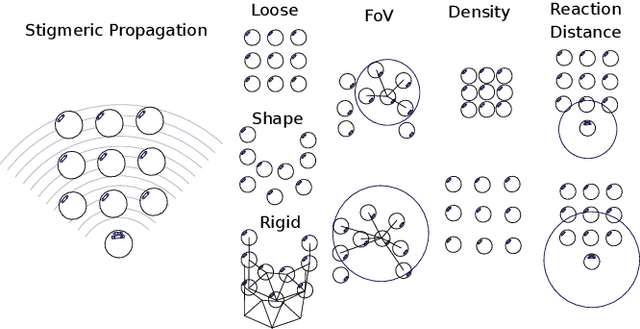
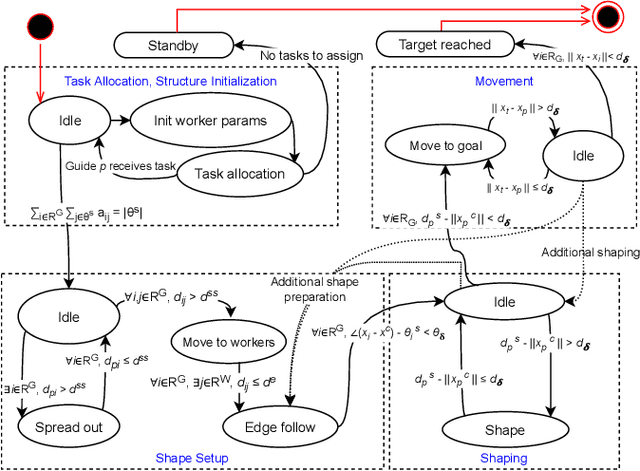
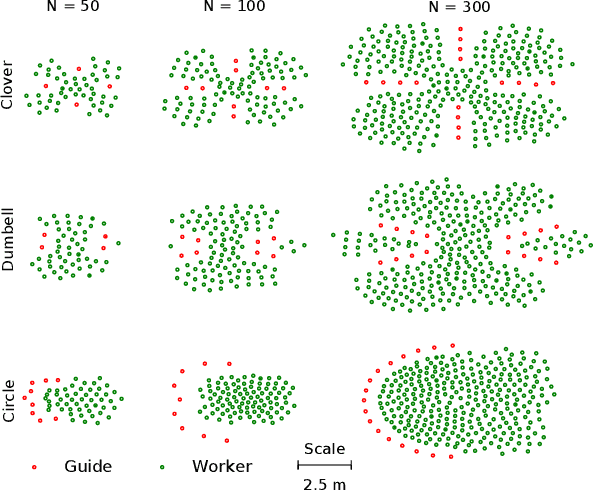
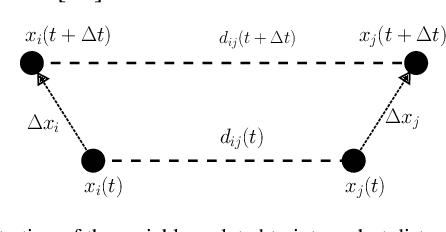
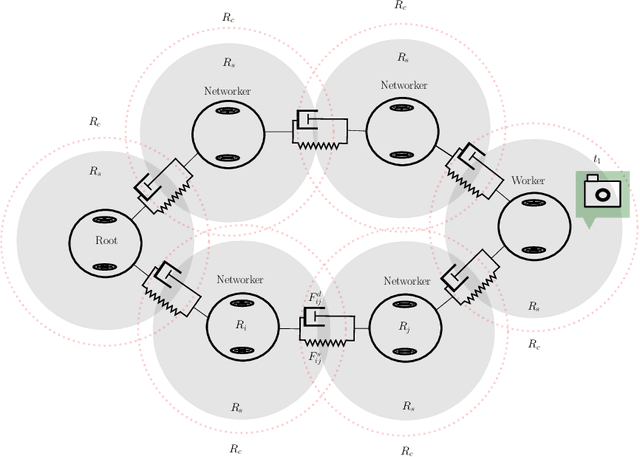
We present a method for the control of robot swarms which allows the shaping and the translation of patterns of simple robots ("smart particles"), using two types of devices. These two types represent a hierarchy: a larger group of simple, oblivious robots (which we call the workers) that is governed by simple local attraction forces, and a smaller group (the guides) with sufficient mission knowledge to create and maintain a desired pattern by operating on the local forces of the former. This framework exploits the knowledge of the guides, which coordinate to shape the workers like smart particles by changing their interaction parameters. We study the approach with a large scale simulation experiment in a physics based simulator with up to 1000 robots forming three different patterns. Our experiments reveal that the approach scales well with increasing robot numbers, and presents little pattern distortion for a set of target moving shapes. We evaluate the approach on a physical swarm of robots that use visual inertial odometry to compute their relative positions and obtain results that are comparable with simulation. This work lays foundation for designing and coordinating configurable smart particles, with applications in smart materials and nanomedicine.
Self-Healing Ground-and-Air Connectivity Chains
Sep 23, 2019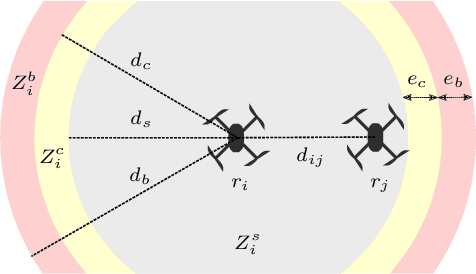


The coordination of robot swarms - large decentralized teams of robots - generally relies on robust and efficient inter-robot communication. Maintaining communication between robots is particularly challenging in field deployments. Unstructured environments, limited computational resources, low bandwidth, and robot failures all contribute to the complexity of connectivity maintenance. In this paper, we propose a novel lightweight algorithm to navigate a group of robots in complex environments while maintaining connectivity by building a chain of robots. The algorithm is robust to single robot failures and can heal broken communication links. The algorithm works in 3D environments: when a region is unreachable by wheeled robots, the chain is extended with flying robots. We test the performance of the algorithm using up to 100 robots in a physics-based simulator with three mazes and different robot failure scenarios. We then validate the algorithm with physical platforms: 7 wheeled robots and 6 flying ones, in homogeneous and heterogeneous scenarios.
Failure-Tolerant Connectivity Maintenance for Robot Swarms
May 12, 2019


Connectivity maintenance plays a key role in achieving a desired global behavior among a swarm of robots. However, connectivity maintenance in realistic environments is hampered by lack of computation resources, low communication bandwidth, robot failures, and unstable links. In this paper, we propose a novel decentralized connectivity-preserving algorithm that can be deployed on top of other behaviors to enforce connectivity constraints. The algorithm takes a set of targets to be reached while keeping a minimum number of redundant links between robots, with the goal of guaranteeing bandwidth and reliability. Robots then incrementally build and maintain a communication backbone with the specified number of links. We empirically study the performance of the algorithm, analyzing its time to convergence, as well as robustness to faults injected into the backbone robots. Our results statistically demonstrate the algorithm's ability to preserve the desired connectivity constraints and to reach the targets with up to 70 percent of individual robot failures in the communication backbone.
Collision-aware Task Assignment for Multi-Robot Systems
Apr 08, 2019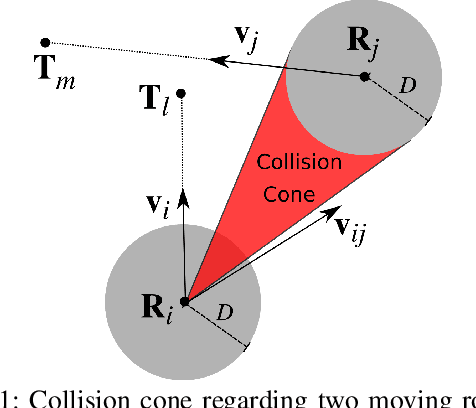



We propose a novel formulation of the collision-aware task assignment (CATA) problem and a decentralized auction-based algorithm to solve the problem with optimality bound. Using a collision cone, we predict potential collisions and introduce a binary decision variable into the local reward function for task bidding. We further improve CATA by implementing a receding collision horizon to address the stopping robot scenario, i.e. when robots are confined to their task location and become static obstacles to other moving robots. The auction-based algorithm encourages the robots to bid for tasks with collision mitigation considerations. We validate the improved task assignment solution with both simulation and experimental results, which show significant reduction of overlapping paths as well as deadlocks.