 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Bench to Flight: Translating Drone Impact Tests into Operational Safety Limits
Feb 05, 2026Indoor micro-aerial vehicles (MAVs) are increasingly used for tasks that require close proximity to people, yet practitioners lack practical methods to tune motion limits based on measured impact risk. We present an end-to-end, open toolchain that converts benchtop impact tests into deployable safety governors for drones. First, we describe a compact and replicable impact rig and protocol for capturing force-time profiles across drone classes and contact surfaces. Second, we provide data-driven models that map pre-impact speed to impulse and contact duration, enabling direct computation of speed bounds for a target force limit. Third, we release scripts and a ROS2 node that enforce these bounds online and log compliance, with support for facility-specific policies. We validate the workflow on multiple commercial off-the-shelf quadrotors and representative indoor assets, demonstrating that the derived governors preserve task throughput while meeting force constraints specified by safety stakeholders. Our contribution is a practical bridge from measured impacts to runtime limits, with shareable datasets, code, and a repeatable process that teams can adopt to certify indoor MAV operations near humans.
Shaping Expressiveness in Robotics: The Role of Design Tools in Crafting Embodied Robot Movements
Feb 04, 2026As robots increasingly become part of shared human spaces, their movements must transcend basic functionality by incorporating expressive qualities to enhance engagement and communication. This paper introduces a movement-centered design pedagogy designed to support engineers in creating expressive robotic arm movements. Through a hands-on interactive workshop informed by interdisciplinary methodologies, participants explored various creative possibilities, generating valuable insights into expressive motion design. The iterative approach proposed integrates analytical frameworks from dance, enabling designers to examine motion through dynamic and embodied dimensions. A custom manual remote controller facilitates interactive, real-time manipulation of the robotic arm, while dedicated animation software supports visualization, detailed motion sequencing, and precise parameter control. Qualitative analysis of this interactive design process reveals that the proposed "toolbox" effectively bridges the gap between human intent and robotic expressiveness resulting in more intuitive and engaging expressive robotic arm movements.
From Safety Standards to Safe Operation with Mobile Robotic Systems Deployment
Feb 28, 2025



Mobile robotic systems are increasingly used in various work environments to support productivity. However, deploying robots in workplaces crowded by human workers and interacting with them results in safety challenges and concerns, namely robot-worker collisions and worker distractions in hazardous environments. Moreover, the literature on risk assessment as well as the standard specific to mobile platforms is rather limited. In this context, this paper first conducts a review of the relevant standards and methodologies and then proposes a risk assessment for the safe deployment of mobile robots on construction sites. The approach extends relevant existing safety standards to encompass uncovered scenarios. Safety recommendations are made based on the framework, after its validation by field experts.
Are Open-Vocabulary Models Ready for Detection of MEP Elements on Construction Sites
Jan 16, 2025



The construction industry has long explored robotics and computer vision, yet their deployment on construction sites remains very limited. These technologies have the potential to revolutionize traditional workflows by enhancing accuracy, efficiency, and safety in construction management. Ground robots equipped with advanced vision systems could automate tasks such as monitoring mechanical, electrical, and plumbing (MEP) systems. The present research evaluates the applicability of open-vocabulary vision-language models compared to fine-tuned, lightweight, closed-set object detectors for detecting MEP components using a mobile ground robotic platform. A dataset collected with cameras mounted on a ground robot was manually annotated and analyzed to compare model performance. The results demonstrate that, despite the versatility of vision-language models, fine-tuned lightweight models still largely outperform them in specialized environments and for domain-specific tasks.
GNN-based Decentralized Perception in Multirobot Systems for Predicting Worker Actions
Jan 08, 2025



In industrial environments, predicting human actions is essential for ensuring safe and effective collaboration between humans and robots. This paper introduces a perception framework that enables mobile robots to understand and share information about human actions in a decentralized way. The framework first allows each robot to build a spatial graph representing its surroundings, which it then shares with other robots. This shared spatial data is combined with temporal information to track human behavior over time. A swarm-inspired decision-making process is used to ensure all robots agree on a unified interpretation of the human's actions. Results show that adding more robots and incorporating longer time sequences improve prediction accuracy. Additionally, the consensus mechanism increases system resilience, making the multi-robot setup more reliable in dynamic industrial settings.
Learning Multi-agent Multi-machine Tending by Mobile Robots
Aug 29, 2024



Robotics can help address the growing worker shortage challenge of the manufacturing industry. As such, machine tending is a task collaborative robots can tackle that can also highly boost productivity. Nevertheless, existing robotics systems deployed in that sector rely on a fixed single-arm setup, whereas mobile robots can provide more flexibility and scalability. In this work, we introduce a multi-agent multi-machine tending learning framework by mobile robots based on Multi-agent Reinforcement Learning (MARL) techniques with the design of a suitable observation and reward. Moreover, an attention-based encoding mechanism is developed and integrated into Multi-agent Proximal Policy Optimization (MAPPO) algorithm to boost its performance for machine tending scenarios. Our model (AB-MAPPO) outperformed MAPPO in this new challenging scenario in terms of task success, safety, and resources utilization. Furthermore, we provided an extensive ablation study to support our various design decisions.
Robotic deployment on construction sites: considerations for safety and productivity impact
Apr 19, 2024Deploying mobile robots in construction sites to collaborate with workers or perform automated tasks such as surveillance and inspections carries the potential to greatly increase productivity, reduce human errors, and save costs. However ensuring human safety is a major concern, and the rough and dynamic construction environments pose multiple challenges for robot deployment. In this paper, we present the insights we obtained from our collaborations with construction companies in Canada and discuss our experiences deploying a semi-autonomous mobile robot in real construction scenarios.
From the Lab to the Theater: An Unconventional Field Robotics Journey
Apr 11, 2024Artistic performances involving robotic systems present unique technical challenges akin to those encountered in other field deployments. In this paper, we delve into the orchestration of robotic artistic performances, focusing on the complexities inherent in communication protocols and localization methods. Through our case studies and experimental insights, we demonstrate the breadth of technical requirements for this type of deployment, and, most importantly, the significant contributions of working closely with non-experts.
Spherical Rolling Robots Design, Modeling, and Control: A Systematic Literature Review
Oct 03, 2023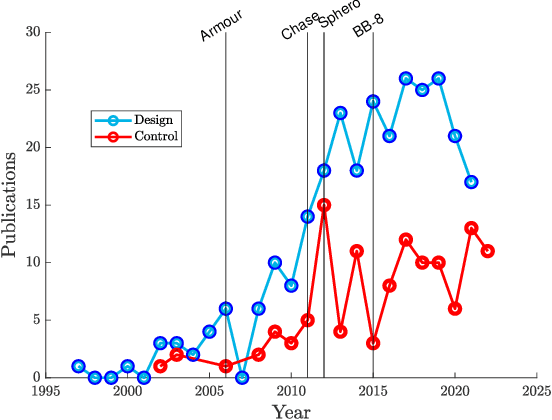
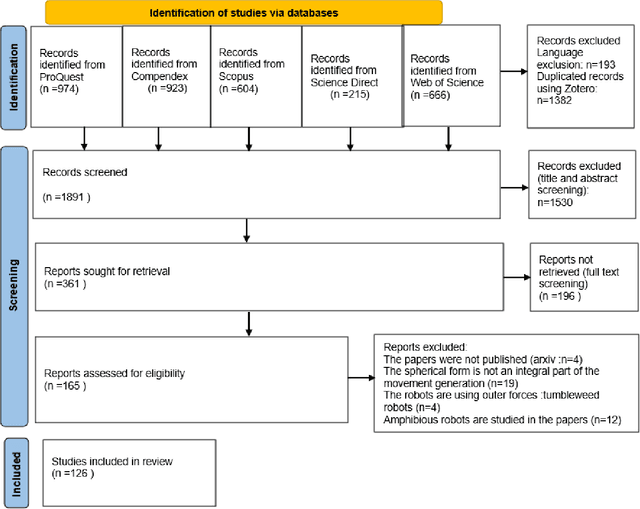
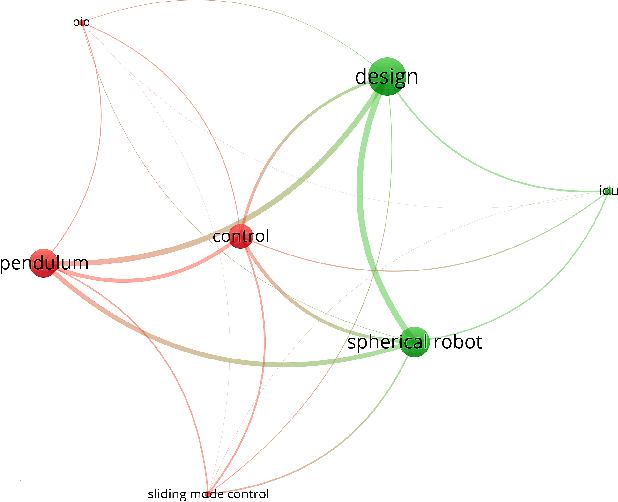
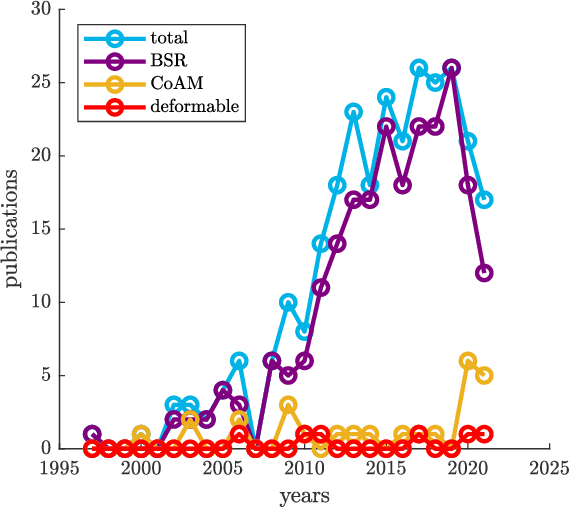
Spherical robots have garnered increasing interest for their applications in exploration, tunnel inspection, and extraterrestrial missions. Diverse designs have emerged, including barycentric configurations, pendulum-based mechanisms, etc. In addition, a wide spectrum of control strategies has been proposed, ranging from traditional PID approaches to cutting-edge neural networks. Our systematic review aims to comprehensively identify and categorize locomotion systems and control schemes employed by spherical robots, spanning the years 1996 to 2023. A meticulous search across five databases yielded a dataset of 3189 records. As a result of our exhaustive analysis, we identified a collection of novel designs and control strategies. Leveraging the insights garnered, we provide valuable recommendations for optimizing the design and control aspects of spherical robots, supporting both novel design endeavors and the advancement of field deployments. Furthermore, we illuminate key research directions that hold the potential to unlock the full capabilities of spherical robots
See as a Bee: UV Sensor for Aerial Strawberry Crop Monitoring
Oct 30, 2022Precision agriculture aims to use technological tools for the agro-food sector to increase productivity, cut labor costs, and reduce the use of resources. This work takes inspiration from bees vision to design a remote sensing system tailored to incorporate UV-reflectance into a flower detector. We demonstrate how this approach can provide feature-rich images for deep learning strawberry flower detection and we apply it to a scalable, yet cost effective aerial monitoring robotic system in the field. We also compare the performance of our UV-G-B image detector with a similar work that utilizes RGB images.