 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Safety Standards to Safe Operation with Mobile Robotic Systems Deployment
Feb 28, 2025Mobile robotic systems are increasingly used in various work environments to support productivity. However, deploying robots in workplaces crowded by human workers and interacting with them results in safety challenges and concerns, namely robot-worker collisions and worker distractions in hazardous environments. Moreover, the literature on risk assessment as well as the standard specific to mobile platforms is rather limited. In this context, this paper first conducts a review of the relevant standards and methodologies and then proposes a risk assessment for the safe deployment of mobile robots on construction sites. The approach extends relevant existing safety standards to encompass uncovered scenarios. Safety recommendations are made based on the framework, after its validation by field experts.
Spherical Rolling Robots Design, Modeling, and Control: A Systematic Literature Review
Oct 03, 2023Spherical robots have garnered increasing interest for their applications in exploration, tunnel inspection, and extraterrestrial missions. Diverse designs have emerged, including barycentric configurations, pendulum-based mechanisms, etc. In addition, a wide spectrum of control strategies has been proposed, ranging from traditional PID approaches to cutting-edge neural networks. Our systematic review aims to comprehensively identify and categorize locomotion systems and control schemes employed by spherical robots, spanning the years 1996 to 2023. A meticulous search across five databases yielded a dataset of 3189 records. As a result of our exhaustive analysis, we identified a collection of novel designs and control strategies. Leveraging the insights garnered, we provide valuable recommendations for optimizing the design and control aspects of spherical robots, supporting both novel design endeavors and the advancement of field deployments. Furthermore, we illuminate key research directions that hold the potential to unlock the full capabilities of spherical robots
Kinova Gen3-Lite manipulator inverse kinematics: optimal polynomial solution
Feb 01, 2021
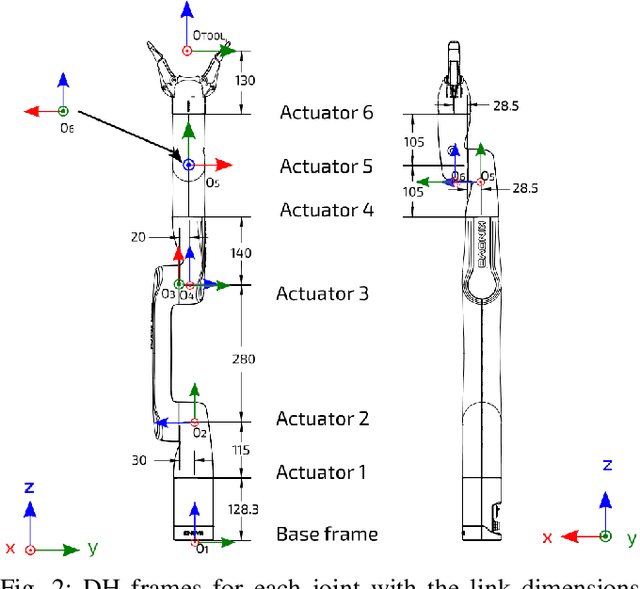
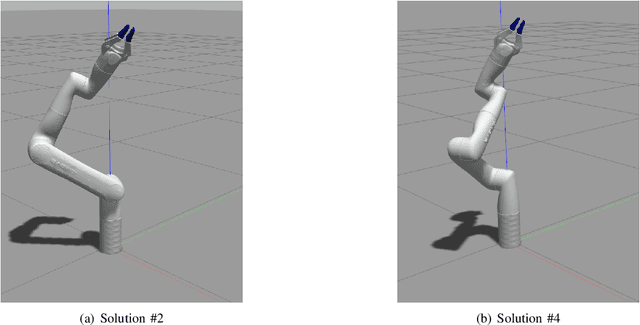
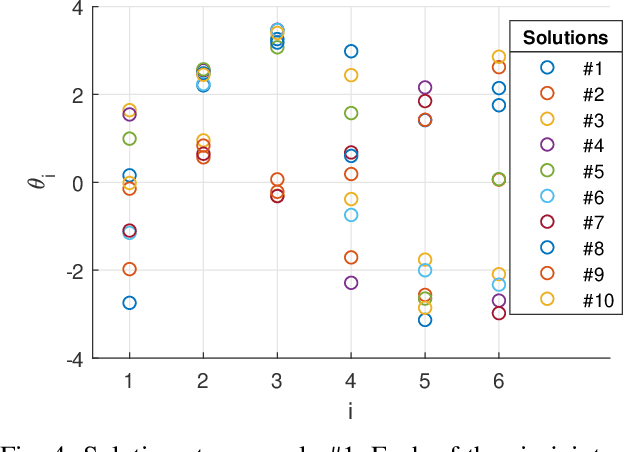
A polynomial solution to the inverse kinematic problem of the Kinova Gen3 Lite robot is proposed in this paper. This serial robot is based on a 6R kinematic chain and is not wrist-partitioned. We first start from the forward kinematics equation providing the position and orientation of the end-effector, finally, the univariate polynomial equation is given as a function of the first joint variable $\theta_{1}$. The remaining joint variables are computed by back substitution. Thus, an unique set of joint position is obtain for each root of the univariate equation. Numerical examples, simulated in ROS (Robot Operating System), are given to validate the results, which are compared to the coordinates obtained with MoveIt! and with the actual robot. A procedure to choose an optimum posture of the robot is also proposed.