 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKinova Gen3-Lite manipulator inverse kinematics: optimal polynomial solution
Feb 01, 2021
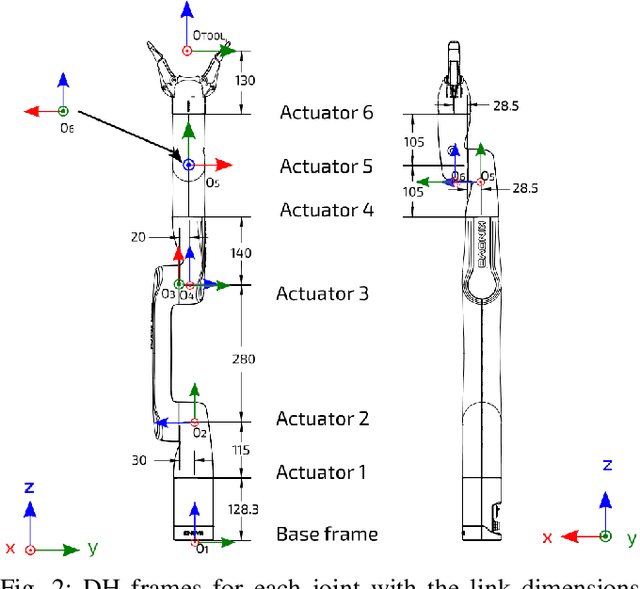
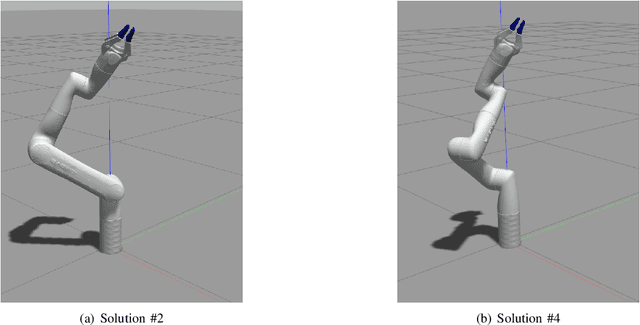
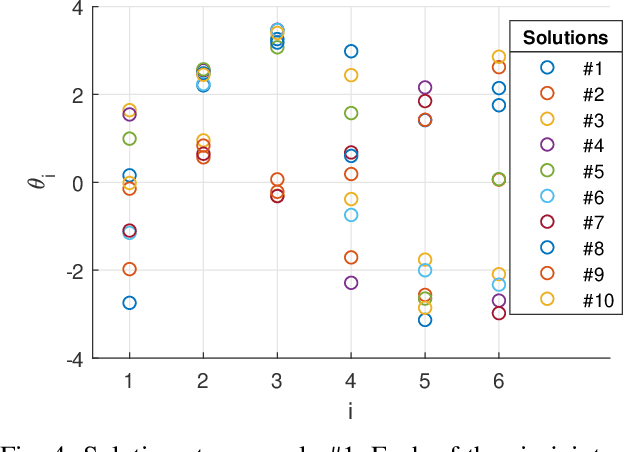
A polynomial solution to the inverse kinematic problem of the Kinova Gen3 Lite robot is proposed in this paper. This serial robot is based on a 6R kinematic chain and is not wrist-partitioned. We first start from the forward kinematics equation providing the position and orientation of the end-effector, finally, the univariate polynomial equation is given as a function of the first joint variable $\theta_{1}$. The remaining joint variables are computed by back substitution. Thus, an unique set of joint position is obtain for each root of the univariate equation. Numerical examples, simulated in ROS (Robot Operating System), are given to validate the results, which are compared to the coordinates obtained with MoveIt! and with the actual robot. A procedure to choose an optimum posture of the robot is also proposed.