 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Safety Standards to Safe Operation with Mobile Robotic Systems Deployment
Feb 28, 2025



Mobile robotic systems are increasingly used in various work environments to support productivity. However, deploying robots in workplaces crowded by human workers and interacting with them results in safety challenges and concerns, namely robot-worker collisions and worker distractions in hazardous environments. Moreover, the literature on risk assessment as well as the standard specific to mobile platforms is rather limited. In this context, this paper first conducts a review of the relevant standards and methodologies and then proposes a risk assessment for the safe deployment of mobile robots on construction sites. The approach extends relevant existing safety standards to encompass uncovered scenarios. Safety recommendations are made based on the framework, after its validation by field experts.
Are Open-Vocabulary Models Ready for Detection of MEP Elements on Construction Sites
Jan 16, 2025



The construction industry has long explored robotics and computer vision, yet their deployment on construction sites remains very limited. These technologies have the potential to revolutionize traditional workflows by enhancing accuracy, efficiency, and safety in construction management. Ground robots equipped with advanced vision systems could automate tasks such as monitoring mechanical, electrical, and plumbing (MEP) systems. The present research evaluates the applicability of open-vocabulary vision-language models compared to fine-tuned, lightweight, closed-set object detectors for detecting MEP components using a mobile ground robotic platform. A dataset collected with cameras mounted on a ground robot was manually annotated and analyzed to compare model performance. The results demonstrate that, despite the versatility of vision-language models, fine-tuned lightweight models still largely outperform them in specialized environments and for domain-specific tasks.
Robotic deployment on construction sites: considerations for safety and productivity impact
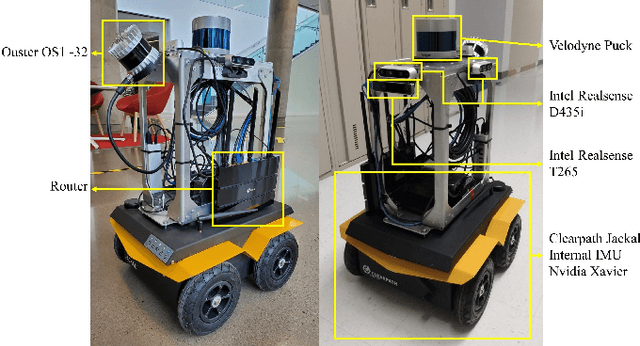
Apr 19, 2024Deploying mobile robots in construction sites to collaborate with workers or perform automated tasks such as surveillance and inspections carries the potential to greatly increase productivity, reduce human errors, and save costs. However ensuring human safety is a major concern, and the rough and dynamic construction environments pose multiple challenges for robot deployment. In this paper, we present the insights we obtained from our collaborations with construction companies in Canada and discuss our experiences deploying a semi-autonomous mobile robot in real construction scenarios.
Semantic navigation with domain knowledge
Jun 18, 2021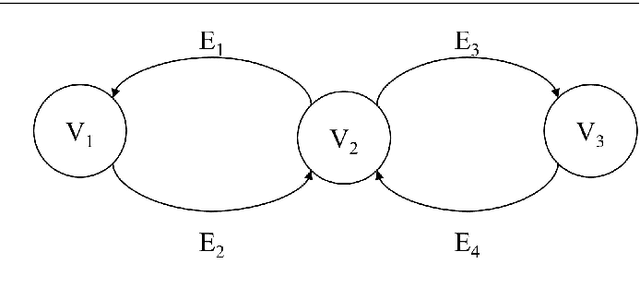
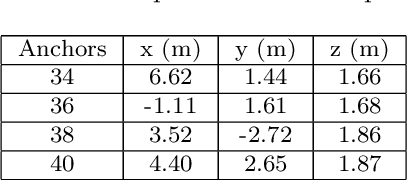
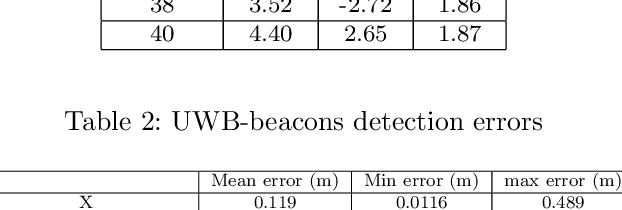
Several deployment locations of mobile robotic systems are human made (i.e. urban firefighter, building inspection, property security) and the manager may have access to domain-specific knowledge about the place, which can provide semantic contextual information allowing better reasoning and decision making. In this paper we propose a system that allows a mobile robot to operate in a location-aware and operator-friendly way, by leveraging semantic information from the deployment location and integrating it to the robots localization and navigation systems. We integrate Building Information Models (BIM) into the Robotic Operating System (ROS), to generate topological and metric maps fed to an layered path planner (global and local). A map merging algorithm integrates newly discovered obstacles into the metric map, while a UWB-based localization system detects equipment to be registered back into the semantic database. The results are validated in simulation and real-life deployments in buildings and construction sites.
Semantic Navigation Using Building Information on Construction Sites
Apr 21, 2021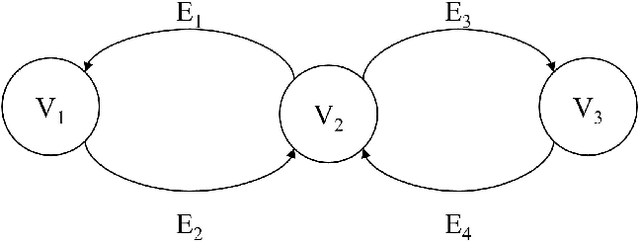
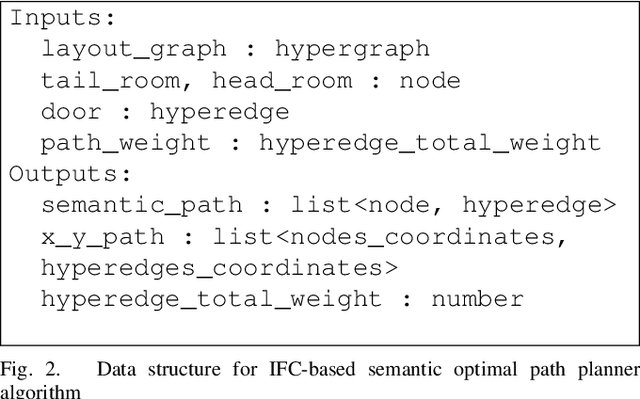

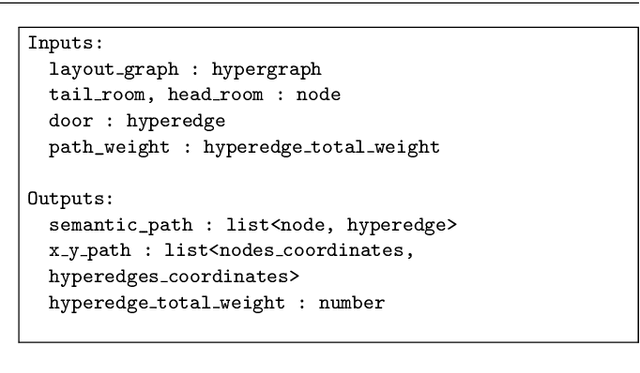
With the growth in automated data collection of construction projects, the need for semantic navigation of mobile robots is increasing. In this paper, we propose an infrastructure to leverage building-related information for smarter, safer and more precise robot navigation during construction phase. Our use of Building Information Models (BIM) in robot navigation is twofold: (1) the intuitive semantic information enables non-experts to deploy robots and (2) the semantic data exposed to the navigation system allows optimal path planning (not necessarily the shortest one). Our Building Information Robotic System (BIRS) uses Industry Foundation Classes (IFC) as the interoperable data format between BIM and the Robotic Operating System (ROS). BIRS generates topological and metric maps from BIM for ROS usage. An optimal path planer, integrating critical components for construction assessment is proposed using a cascade strategy (global versus local). The results are validated through series of experiments in construction sites.
An ontology-based approach to data exchanges for robot navigation on construction sites
Apr 20, 2021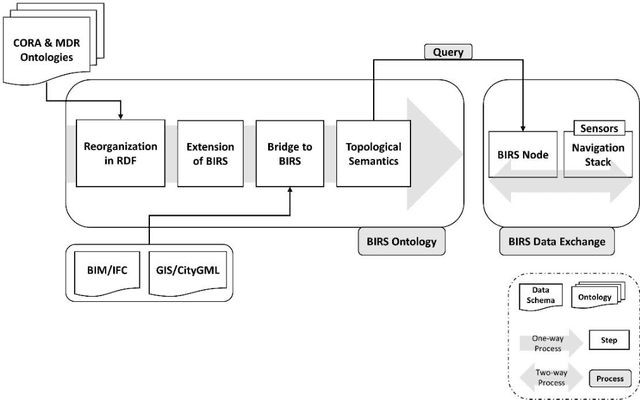
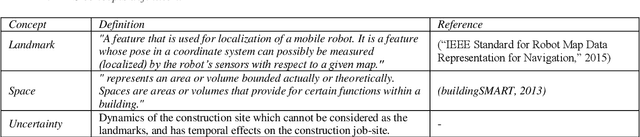
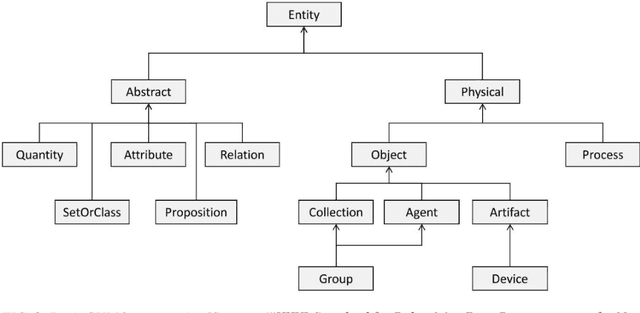
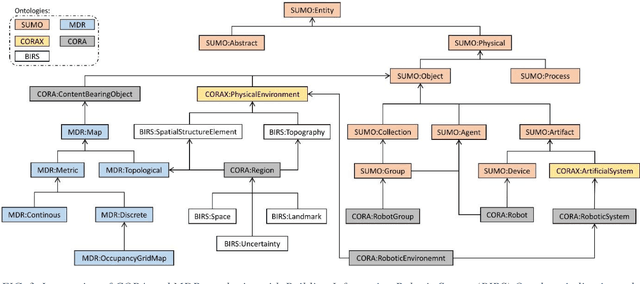
With growth in the use of autonomous Unmanned Ground Vehicle (UGV) for automated data collection from construction projects, the problem of inter-disciplinary semantic data sharing and exchanges between construction and robotic domains has attracted construction stakeholders' attention. Cross-domain data translation requires detailed specifications especially when it comes to semantic data translation. Building Information Modeling (BIM) and Geographic Information System (GIS) are the two technologies to capture and store construction data for indoor structure and outdoor environment respectively. In the absence of a standard format for data exchanges between the construction and robotic domains, the tools of both industries are yet to be integrated in a coherent deployment infrastructure. Hence, the semantics of BIM-GIS cannot be automatically integrated by any robotic platform. To enable semantic data transfer across domains, semantic web technology has been widely used in multidisciplinary areas for interoperability. We exploit it to pave the way to a smarter, quicker and more precise robot navigation on job-sites. This paper develops a semantic web ontology integrating robot navigation and data collection to convey the meanings from BIM-GIS to the robot. The proposed Building Information Robotic System (BIRS) provides construction data that are semantically transferred to the robotic platform and can be used by the robot navigation software stack on construction sites. To reach this objective, we first need to bridge the knowledge representation between construction and robotic domains. Then, we develop a semantic database to integrate with Robot Operating System (ROS) which can communicate with the robot and the navigation system in order to provide the robot with semantic building data at each step of data collection. Finally, the proposed system is validated through a case study.