 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Robot Decentralized Collaborative SLAM in Planetary Analogue Environments: Dataset, Challenges, and Lessons Learned
Jan 28, 2026Decentralized collaborative simultaneous localization and mapping (C-SLAM) is essential to enable multirobot missions in unknown environments without relying on preexisting localization and communication infrastructure. This technology is anticipated to play a key role in the exploration of the Moon, Mars, and other planets. In this article, we share insights and lessons learned from C-SLAM experiments involving three robots operating on a Mars analogue terrain and communicating over an ad hoc network. We examine the impact of limited and intermittent communication on C-SLAM performance, as well as the unique localization challenges posed by planetary-like environments. Additionally, we introduce a novel dataset collected during our experiments, which includes real-time peer-to-peer inter-robot throughput and latency measurements. This dataset aims to support future research on communication-constrained, decentralized multirobot operations.
Guided by Guardrails: Control Barrier Functions as Safety Instructors for Robotic Learning
May 24, 2025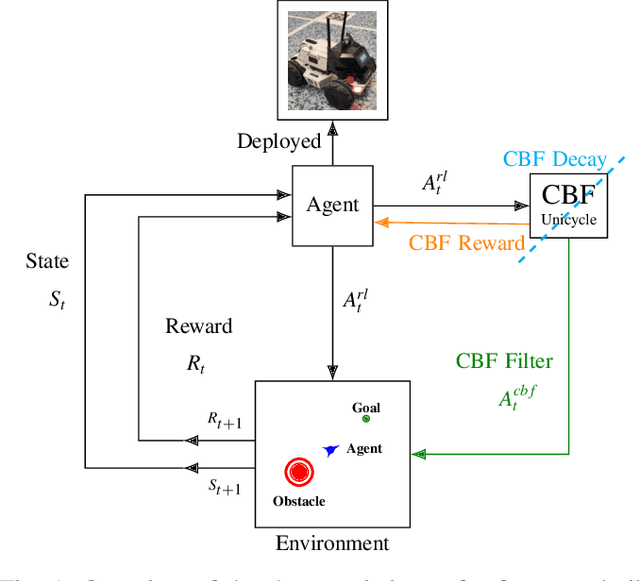
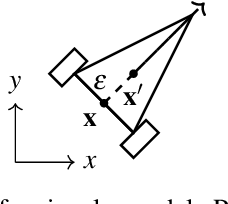
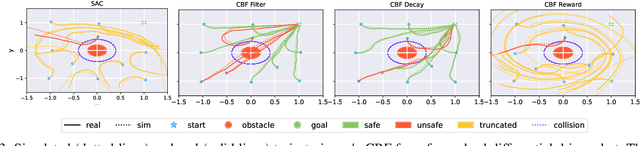
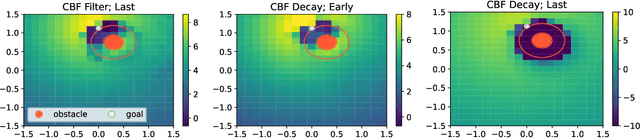
Safety stands as the primary obstacle preventing the widespread adoption of learning-based robotic systems in our daily lives. While reinforcement learning (RL) shows promise as an effective robot learning paradigm, conventional RL frameworks often model safety by using single scalar negative rewards with immediate episode termination, failing to capture the temporal consequences of unsafe actions (e.g., sustained collision damage). In this work, we introduce a novel approach that simulates these temporal effects by applying continuous negative rewards without episode termination. Our experiments reveal that standard RL methods struggle with this model, as the accumulated negative values in unsafe zones create learning barriers. To address this challenge, we demonstrate how Control Barrier Functions (CBFs), with their proven safety guarantees, effectively help robots avoid catastrophic regions while enhancing learning outcomes. We present three CBF-based approaches, each integrating traditional RL methods with Control Barrier Functions, guiding the agent to learn safe behavior. Our empirical analysis, conducted in both simulated environments and real-world settings using a four-wheel differential drive robot, explores the possibilities of employing these approaches for safe robotic learning.
Bridging Swarm Intelligence and Reinforcement Learning
Oct 23, 2024



Swarm intelligence (SI) explores how large groups of simple individuals (e.g., insects, fish, birds) collaborate to produce complex behaviors, exemplifying that the whole is greater than the sum of its parts. A fundamental task in SI is Collective Decision-Making (CDM), where a group selects the best option among several alternatives, such as choosing an optimal foraging site. In this work, we demonstrate a theoretical and empirical equivalence between CDM and single-agent reinforcement learning (RL) in multi-armed bandit problems, utilizing concepts from opinion dynamics, evolutionary game theory, and RL. This equivalence bridges the gap between SI and RL and leads us to introduce a novel abstract RL update rule called Maynard-Cross Learning. Additionally, it provides a new population-based perspective on common RL practices like learning rate adjustment and batching. Our findings enable cross-disciplinary fertilization between RL and SI, allowing techniques from one field to enhance the understanding and methodologies of the other.
Evolution with Opponent-Learning Awareness
Oct 22, 2024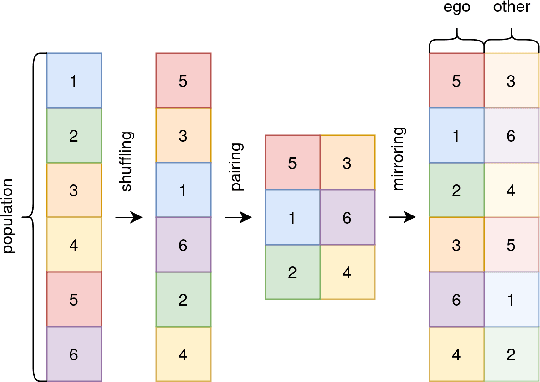
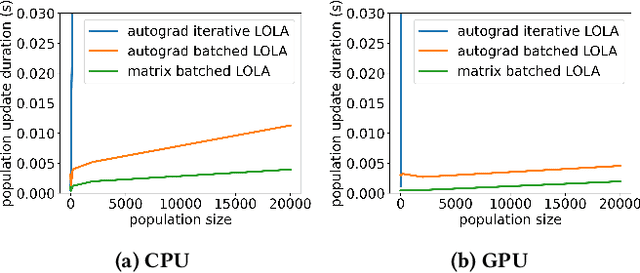
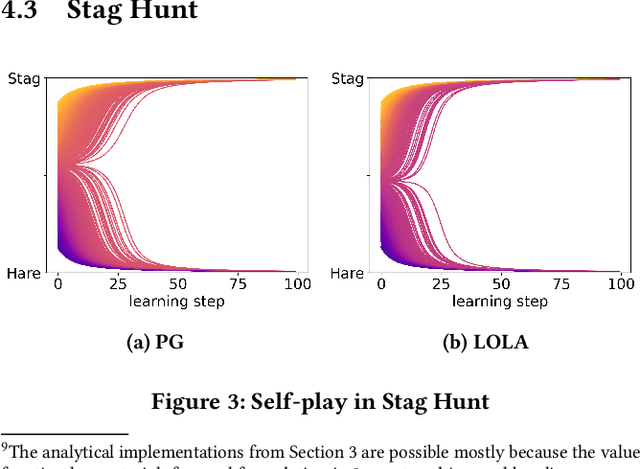

The universe involves many independent co-learning agents as an ever-evolving part of our observed environment. Yet, in practice, Multi-Agent Reinforcement Learning (MARL) applications are usually constrained to small, homogeneous populations and remain computationally intensive. In this paper, we study how large heterogeneous populations of learning agents evolve in normal-form games. We show how, under assumptions commonly made in the multi-armed bandit literature, Multi-Agent Policy Gradient closely resembles the Replicator Dynamic, and we further derive a fast, parallelizable implementation of Opponent-Learning Awareness tailored for evolutionary simulations. This enables us to simulate the evolution of very large populations made of heterogeneous co-learning agents, under both naive and advanced learning strategies. We demonstrate our approach in simulations of 200,000 agents, evolving in the classic games of Hawk-Dove, Stag-Hunt, and Rock-Paper-Scissors. Each game highlights distinct ways in which Opponent-Learning Awareness affects evolution.
Hierarchies define the scalability of robot swarms
May 03, 2024



The emerging behaviors of swarms have fascinated scientists and gathered significant interest in the field of robotics. Traditionally, swarms are viewed as egalitarian, with robots sharing identical roles and capabilities. However, recent findings highlight the importance of hierarchy for deploying robot swarms more effectively in diverse scenarios. Despite nature's preference for hierarchies, the robotics field has clung to the egalitarian model, partly due to a lack of empirical evidence for the conditions favoring hierarchies. Our research demonstrates that while egalitarian swarms excel in environments proportionate to their collective sensing abilities, they struggle in larger or more complex settings. Hierarchical swarms, conversely, extend their sensing reach efficiently, proving successful in larger, more unstructured environments with fewer resources. We validated these concepts through simulations and physical robot experiments, using a complex radiation cleanup task. This study paves the way for developing adaptable, hierarchical swarm systems applicable in areas like planetary exploration and autonomous vehicles. Moreover, these insights could deepen our understanding of hierarchical structures in biological organisms.
Decentralized shape formation and force-based interactive formation control in robot swarms
Sep 03, 2023
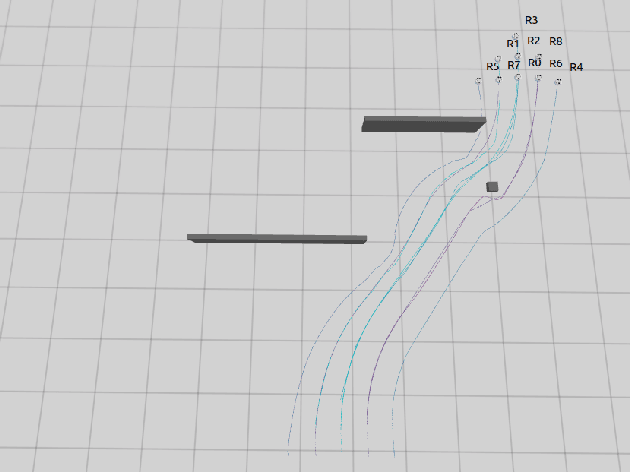
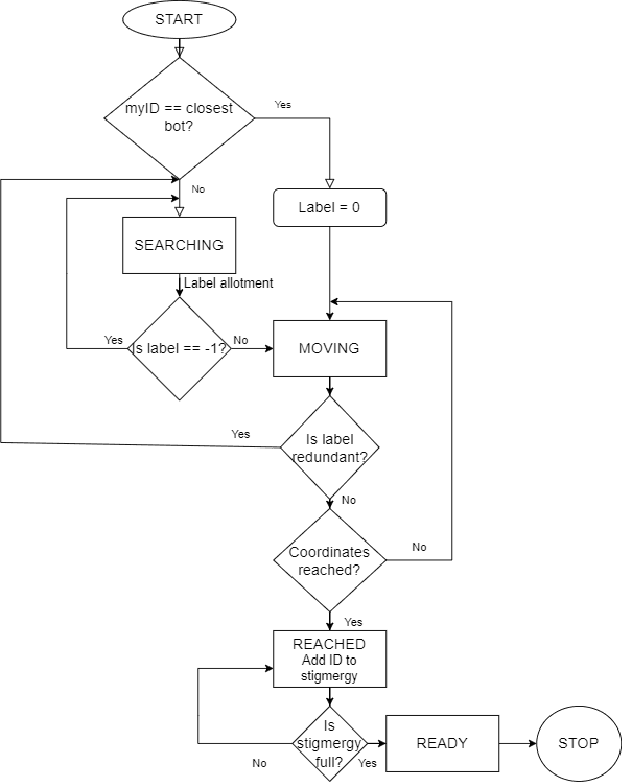
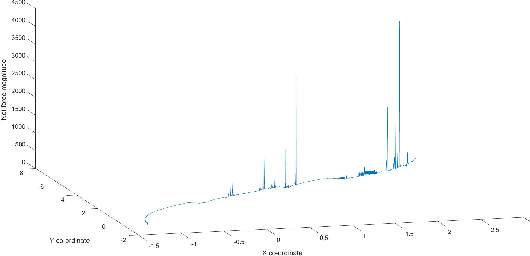
Swarm robotic systems utilize collective behaviour to achieve goals that might be too complex for a lone entity, but become attainable with localized communication and collective decision making. In this paper, a behaviour-based distributed approach to shape formation is proposed. Flocking into strategic formations is observed in migratory birds and fish to avoid predators and also for energy conservation. The formation is maintained throughout long periods without collapsing and is advantageous for communicating within the flock. Similar behaviour can be deployed in multi-agent systems to enhance coordination within the swarm. Existing methods for formation control are either dependent on the size and geometry of the formation or rely on maintaining the formation with a single reference in the swarm (the leader). These methods are not resilient to failure and involve a high degree of deformation upon obstacle encounter before the shape is recovered again. To improve the performance, artificial force-based interaction amongst the entities of the swarm to maintain shape integrity while encountering obstacles is elucidated.
Congestion and Scalability in Robot Swarms: a Study on Collective Decision Making
Jul 17, 2023



One of the most important promises of decentralized systems is scalability, which is often assumed to be present in robot swarm systems without being contested. Simple limitations, such as movement congestion and communication conflicts, can drastically affect scalability. In this work, we study the effects of congestion in a binary collective decision-making task. We evaluate the impact of two types of congestion (communication and movement) when using three different techniques for the task: Honey Bee inspired, Stigmergy based, and Division of Labor. We deploy up to 150 robots in a physics-based simulator performing a sampling mission in an arena with variable levels of robot density, applying the three techniques. Our results suggest that applying Division of Labor coupled with versioned local communication helps to scale the system by minimizing congestion.
A Complete Set of Connectivity-aware Local Topology Manipulation Operations for Robot Swarms
Oct 04, 2022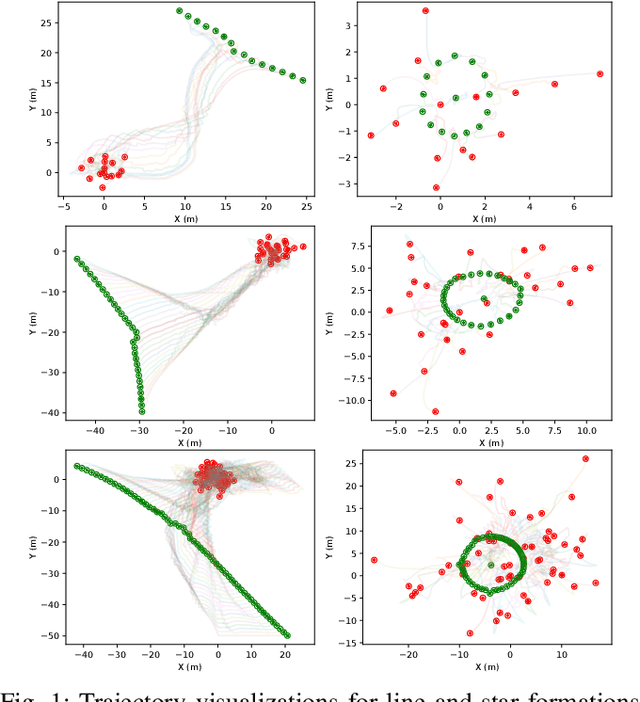
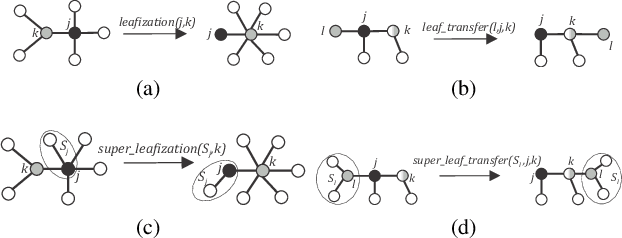
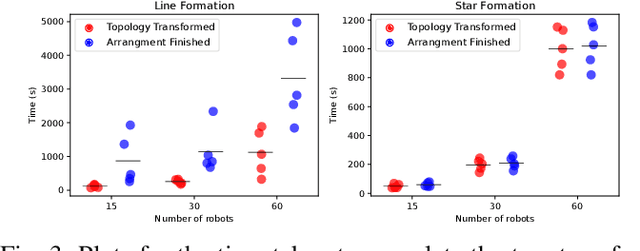
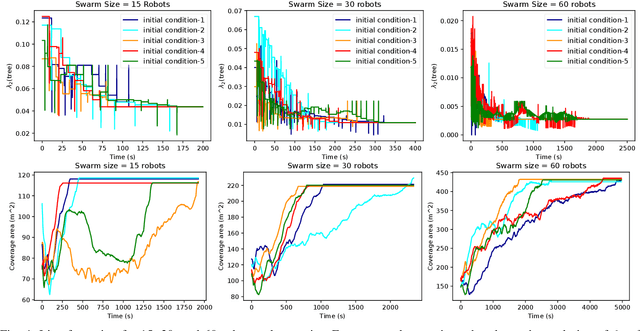
The topology of a robotic swarm affects the convergence speed of consensus and the mobility of the robots. In this paper, we prove the existence of a complete set of local topology manipulation operations that allow the transformation of a swarm topology. The set is complete in the sense that any other possible set of manipulation operations can be performed by a sequence of operations from our set. The operations are local as they depend only on the first and second hop neighbors' information to transform any initial spanning tree of the network's graph to any other connected tree with the same number of nodes. The flexibility provided by our method is similar to global methods that require full knowledge of the swarm network. We prove the existence of a sequence of transformations for any tree-to-tree transformation, and derive sequences of operations to form a line or star from any initial spanning tree. Our work provides a theoretical and practical framework for topological control of a swarm, establishing global properties using only local information.
Collective transport via sequential caging
Jun 06, 2021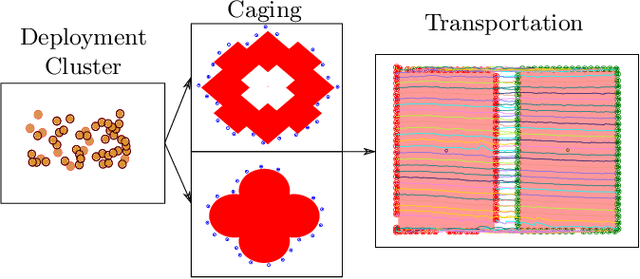

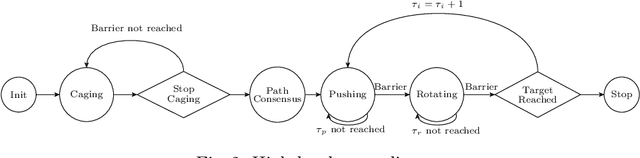
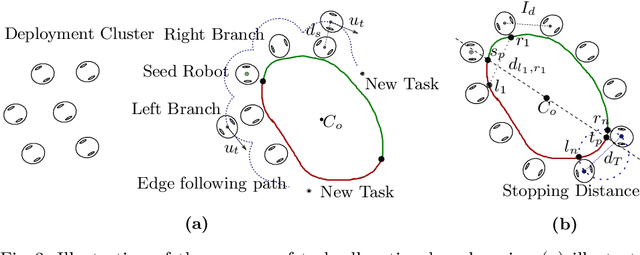
We propose a decentralized algorithm to collaboratively transport arbitrarily shaped objects using a swarm of robots. Our approach starts with a task allocation phase that sequentially distributes locations around the object to be transported starting from a seed robot that makes first contact with the object. Our approach does not require previous knowledge of the shape of the object to ensure caging. To push the object to a goal location, we estimate the robots required to apply force on the object based on the angular difference between the target and the object. During transport, the robots follow a sequence of intermediate goal locations specifying the required pose of the object at that location. We evaluate our approach in a physics-based simulator with up to 100 robots, using three generic paths. Experiments using a group of KheperaIV robots demonstrate the effectiveness of our approach in a real setting. Keywords: Collaborative transport, Task Allocation, Caging, Robot Swarms