 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuided by Guardrails: Control Barrier Functions as Safety Instructors for Robotic Learning
May 24, 2025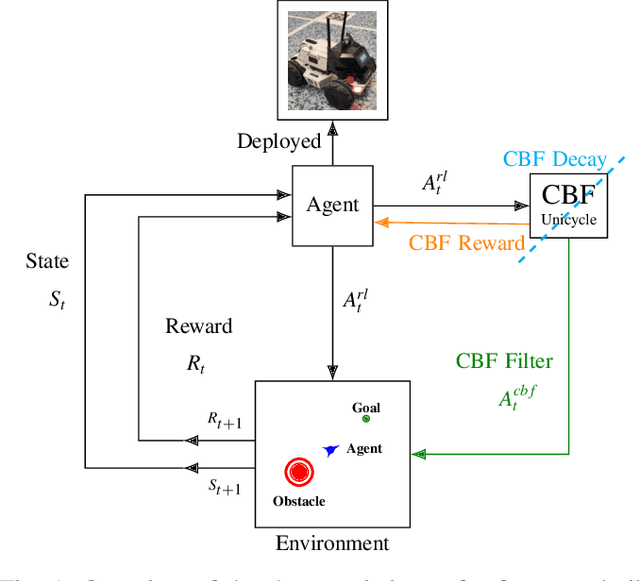
Safety stands as the primary obstacle preventing the widespread adoption of learning-based robotic systems in our daily lives. While reinforcement learning (RL) shows promise as an effective robot learning paradigm, conventional RL frameworks often model safety by using single scalar negative rewards with immediate episode termination, failing to capture the temporal consequences of unsafe actions (e.g., sustained collision damage). In this work, we introduce a novel approach that simulates these temporal effects by applying continuous negative rewards without episode termination. Our experiments reveal that standard RL methods struggle with this model, as the accumulated negative values in unsafe zones create learning barriers. To address this challenge, we demonstrate how Control Barrier Functions (CBFs), with their proven safety guarantees, effectively help robots avoid catastrophic regions while enhancing learning outcomes. We present three CBF-based approaches, each integrating traditional RL methods with Control Barrier Functions, guiding the agent to learn safe behavior. Our empirical analysis, conducted in both simulated environments and real-world settings using a four-wheel differential drive robot, explores the possibilities of employing these approaches for safe robotic learning.
Learning Control Barrier Functions and their application in Reinforcement Learning: A Survey
Apr 22, 2024



Reinforcement learning is a powerful technique for developing new robot behaviors. However, typical lack of safety guarantees constitutes a hurdle for its practical application on real robots. To address this issue, safe reinforcement learning aims to incorporate safety considerations, enabling faster transfer to real robots and facilitating lifelong learning. One promising approach within safe reinforcement learning is the use of control barrier functions. These functions provide a framework to ensure that the system remains in a safe state during the learning process. However, synthesizing control barrier functions is not straightforward and often requires ample domain knowledge. This challenge motivates the exploration of data-driven methods for automatically defining control barrier functions, which is highly appealing. We conduct a comprehensive review of the existing literature on safe reinforcement learning using control barrier functions. Additionally, we investigate various techniques for automatically learning the Control Barrier Functions, aiming to enhance the safety and efficacy of Reinforcement Learning in practical robot applications.
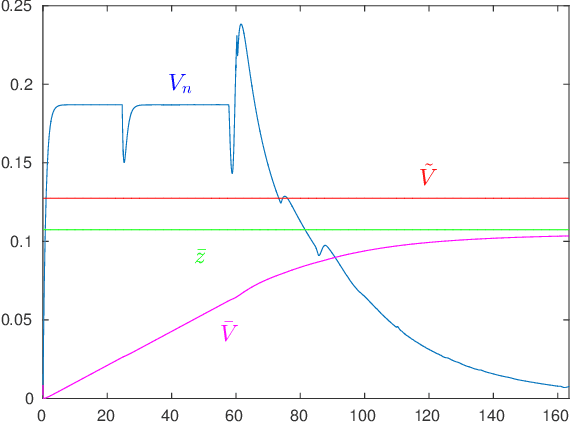
Energy Sufficiency in Unknown Environments via Control Barrier Functions
Jun 26, 2023Maintaining energy sufficiency of a battery-powered robot system is a essential for long-term missions. This capability should be flexible enough to deal with different types of environment and a wide range of missions, while constantly guaranteeing that the robot does not run out of energy. In this work we present a framework based on Control Barrier Functions (CBFs) that provides an energy sufficiency layer that can be applied on top of any path planner and provides guarantees on the robot's energy consumption during mission execution. In practice, we smooth the output of a generic path planner using double sigmoid functions and then use CBFs to ensure energy sufficiency along the smoothed path, for robots described by single integrator and unicycle kinematics. We present results using a physics-based robot simulator, as well as with real robots with a full localization and mapping stack to show the validity of our approach.
A Flexible Exoskeleton for Collision Resilience
Jul 23, 2021

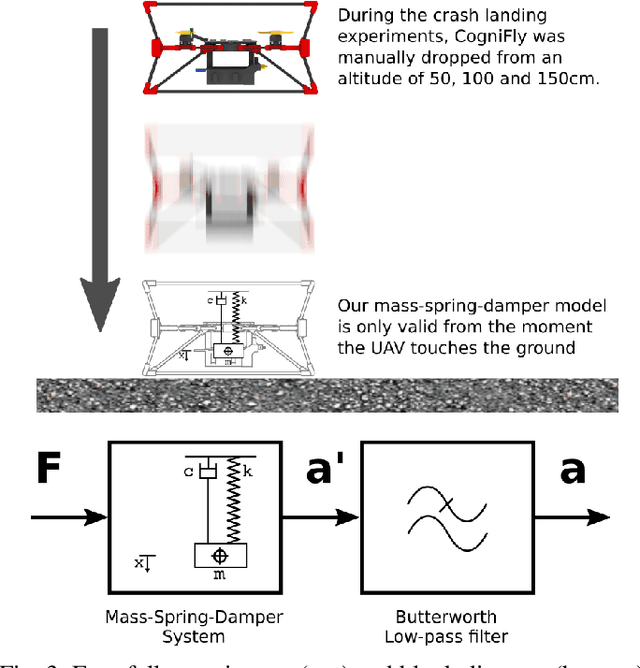

With inspiration from arthropods' exoskeletons, we designed a simple, easily manufactured, semi-rigid structure with flexible joints that can passively damp impact energy. This exoskeleton fuses the protective shell to the main robot structure, thereby minimizing its loss in payload capacity. Our design is simple to build and customize using cheap components and consumer-grade 3D printers. Our results show we can build a sub-250g, autonomous quadcopter with visual navigation that can survive multiple collisions, shows a five-fold increase in the passive energy absorption, that is also suitable for automated battery swapping, and with enough computing power to run deep neural network models. This structure makes for an ideal platform for high-risk activities (such as flying in a cluttered environment or reinforcement learning training) without damage to the hardware or the environment.
Decentralized Connectivity Maintenance with Time Delays using Control Barrier Functions
Mar 23, 2021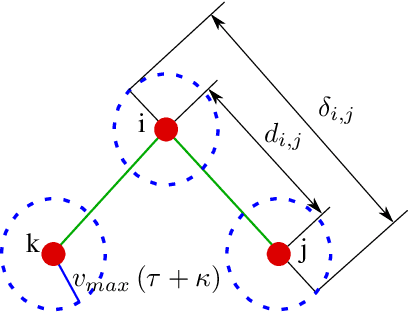
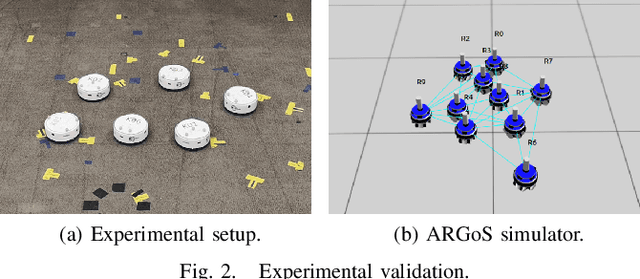
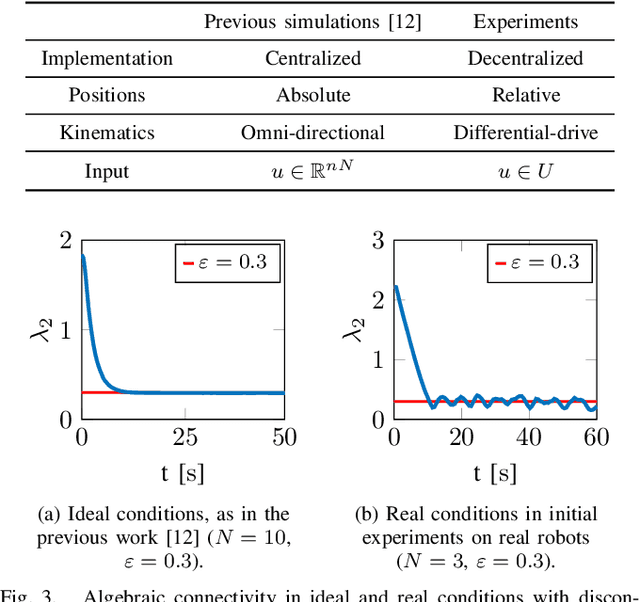
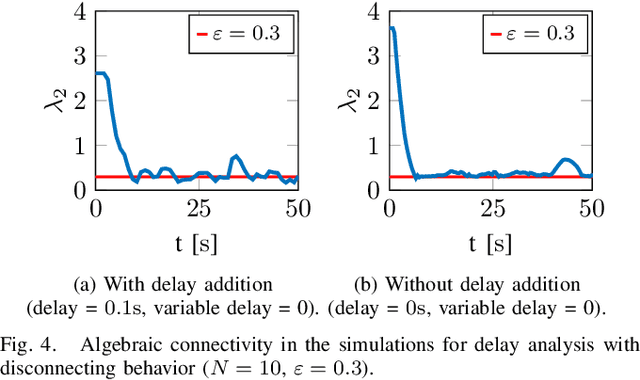
Connectivity maintenance is crucial for the real world deployment of multi-robot systems, as it ultimately allows the robots to communicate, coordinate and perform tasks in a collaborative way. A connectivity maintenance controller must keep the multi-robot system connected independently from the system's mission and in the presence of undesired real world effects such as communication delays, model errors, and computational time delays, among others. In this paper we present the implementation, on a real robotic setup, of a connectivity maintenance control strategy based on Control Barrier Functions. During experimentation, we found that the presence of communication delays has a significant impact on the performance of the controlled system, with respect to the ideal case. We propose a heuristic to counteract the effects of communication delays, and we verify its efficacy both in simulation and with physical robot experiments.
When Being Soft Makes You Tough: A Collision Resilient Quadcopter Inspired by Arthropod Exoskeletons
Mar 07, 2021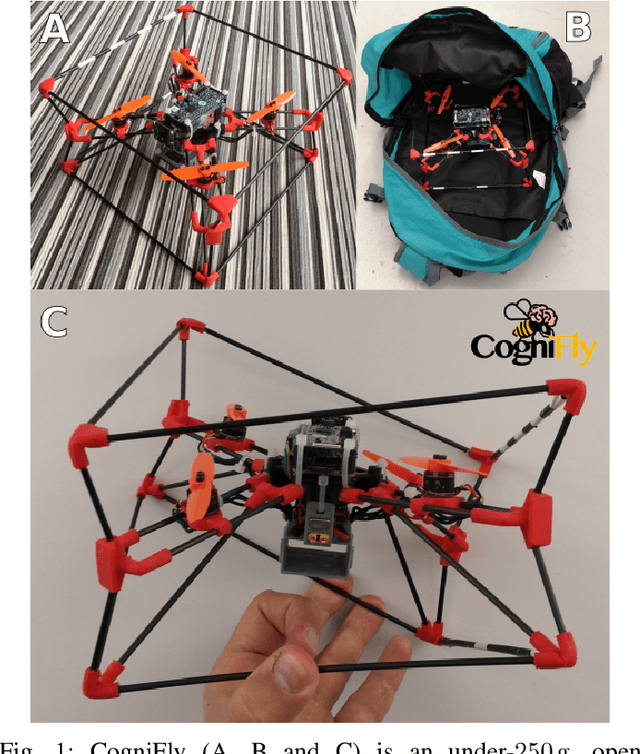
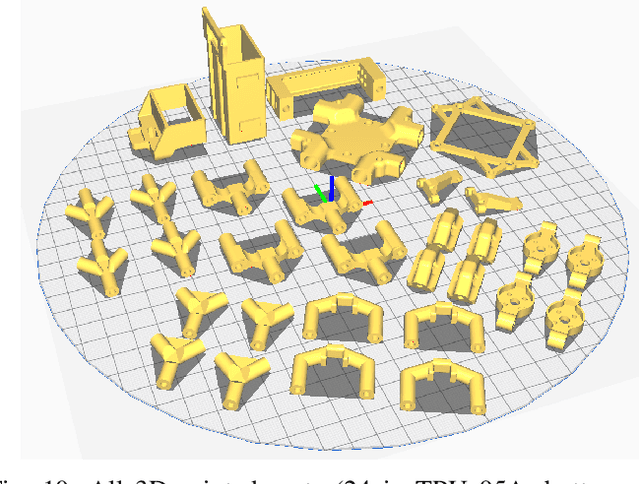
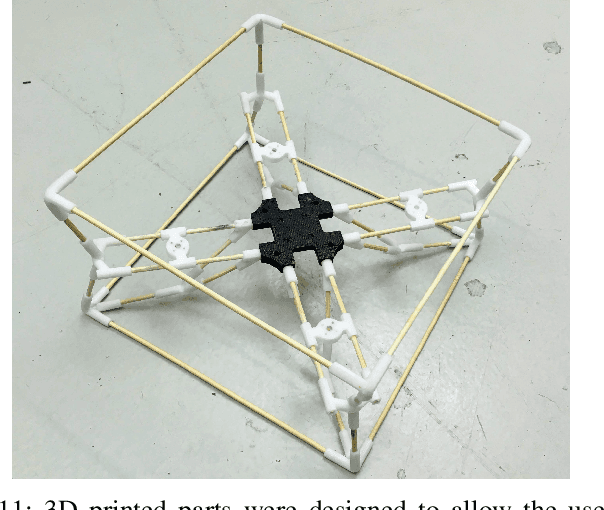
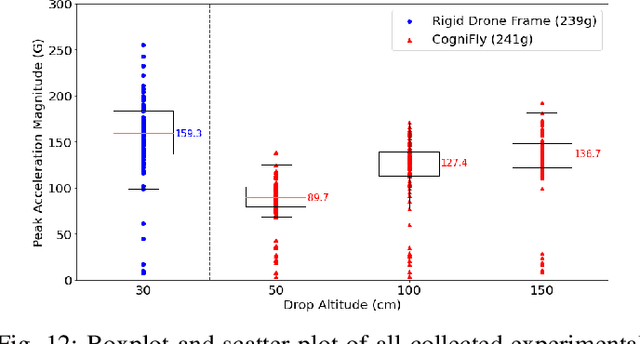
Flying robots are usually rather delicate, and require protective enclosures when facing the risk of collision. High complexity and reduced payload are recurrent problems with collision-tolerant flying robots. Inspired by arthropods' exoskeletons, we design a simple, easily manufactured, semi-rigid structure with flexible joints that can withstand high-velocity impacts. With an exoskeleton, the protective shell becomes part of the main robot structure, thereby minimizing its loss in payload capacity. Our design is simple to build and customize using cheap components and consumer-grade 3D printers. Our results show we can build a sub-250g, autonomous quadcopter with visual navigation that can survive multiple collisions at speeds up to 7m/s that is also suitable for automated battery swapping, and with enough computing power to run deep neural network models. This structure makes for an ideal platform for high-risk activities (such as flying in a cluttered environment or reinforcement learning training) without damage to the hardware or the environment.
Multi-robot energy autonomy with wind and constrained resources
Jan 21, 2021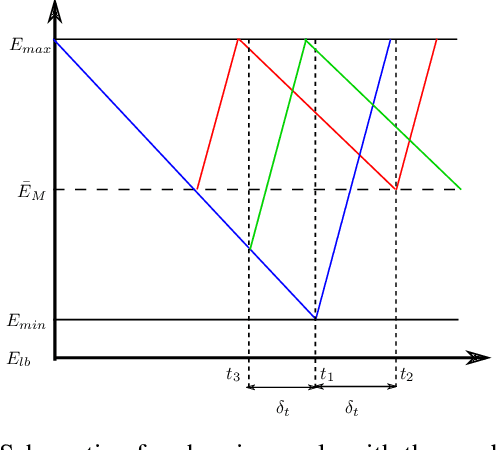
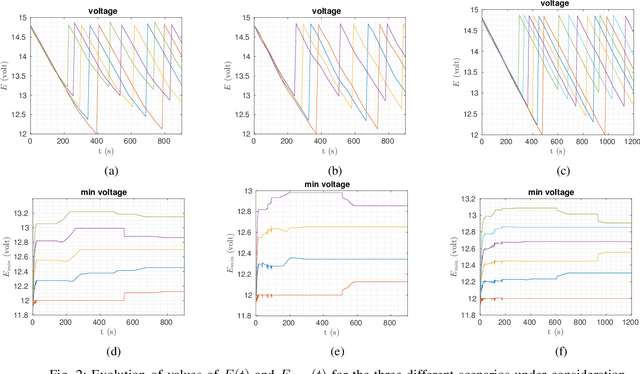
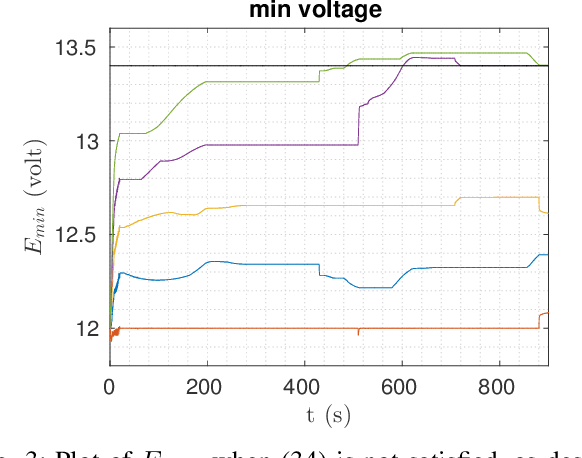
One aspect of the ever-growing need for long term autonomy of multi-robot systems, is ensuring energy sufficiency. In particular, in scenarios where charging facilities are limited, battery-powered robots need to coordinate to share access. In this work we extend previous results by considering robots that carry out a generic mission while sharing a single charging station, while being affected by air drag and wind fields. Our mission-agnostic framework based on control barrier functions (CBFs) ensures energy sufficiency (i.e., maintaining all robots above a certain voltage threshold) and proper coordination (i.e., ensuring mutually exclusive use of the available charging station). Moreover, we investigate the feasibility requirements of the system in relation to individual robots' properties, as well as air drag and wind effects. We show simulation results that demonstrate the effectiveness of the proposed framework.