 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHMPCC: Human-Aware Model Predictive Coverage Control
Dec 14, 2025We address the problem of coordinating a team of robots to cover an unknown environment while ensuring safe operation and avoiding collisions with non-cooperative agents. Traditional coverage strategies often rely on simplified assumptions, such as known or convex environments and static density functions, and struggle to adapt to real-world scenarios, especially when humans are involved. In this work, we propose a human-aware coverage framework based on Model Predictive Control (MPC), namely HMPCC, where human motion predictions are integrated into the planning process. By anticipating human trajectories within the MPC horizon, robots can proactively coordinate their actions %avoid redundant exploration, and adapt to dynamic conditions. The environment is modeled as a Gaussian Mixture Model (GMM), representing regions of interest. Team members operate in a fully decentralized manner, without relying on explicit communication, an essential feature in hostile or communication-limited scenarios. Our results show that human trajectory forecasting enables more efficient and adaptive coverage, improving coordination between human and robotic agents.
Distributed Coverage Control for Time-Varying Spatial Processes
Feb 11, 2025Multi-robot systems are essential for environmental monitoring, particularly for tracking spatial phenomena like pollution, soil minerals, and water salinity, and more. This study addresses the challenge of deploying a multi-robot team for optimal coverage in environments where the density distribution, describing areas of interest, is unknown and changes over time. We propose a fully distributed control strategy that uses Gaussian Processes (GPs) to model the spatial field and balance the trade-off between learning the field and optimally covering it. Unlike existing approaches, we address a more realistic scenario by handling time-varying spatial fields, where the exploration-exploitation trade-off is dynamically adjusted over time. Each robot operates locally, using only its own collected data and the information shared by the neighboring robots. To address the computational limits of GPs, the algorithm efficiently manages the volume of data by selecting only the most relevant samples for the process estimation. The performance of the proposed algorithm is evaluated through several simulations and experiments, incorporating real-world data phenomena to validate its effectiveness.
Robust Trajectory Generation and Control for Quadrotor Motion Planning with Field-of-View Control Barrier Certification
Feb 03, 2025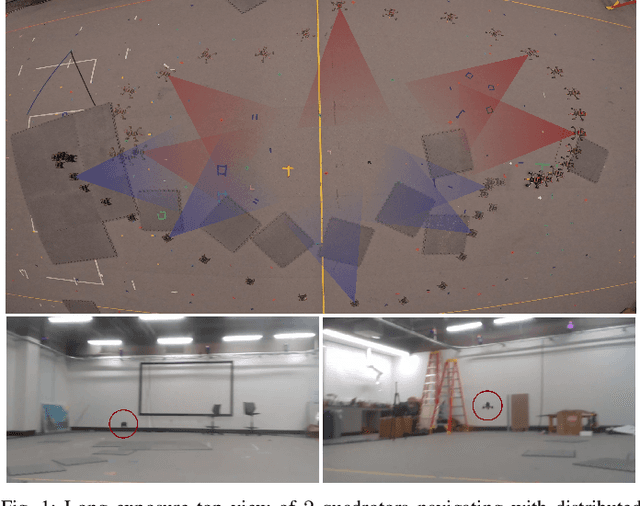
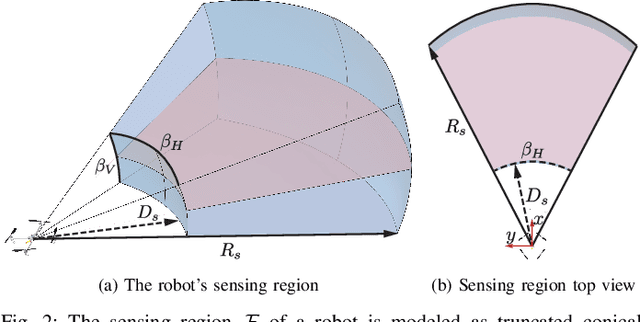
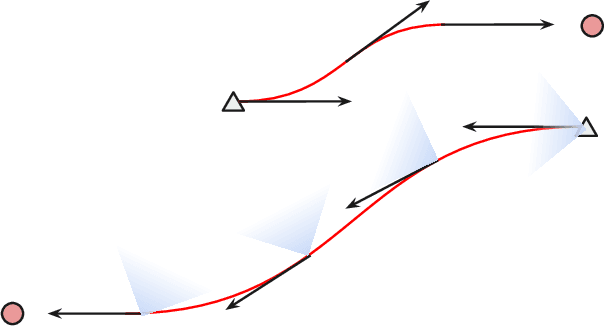
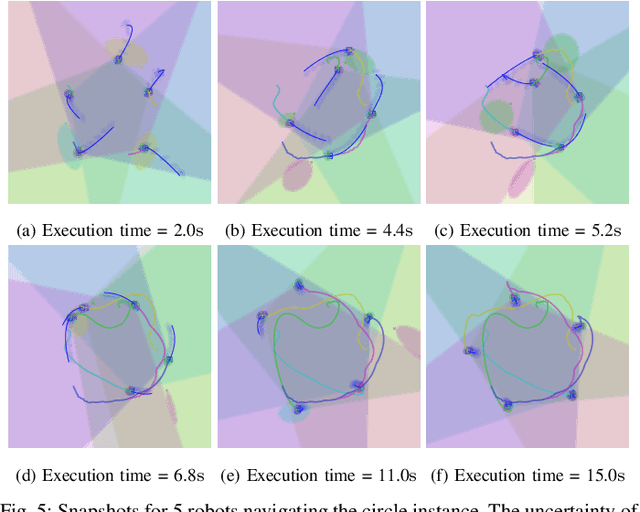
Many approaches to multi-robot coordination are susceptible to failure due to communication loss and uncertainty in estimation. We present a real-time communication-free distributed algorithm for navigating robots to their desired goals certified by control barrier functions, that model and control the onboard sensing behavior to keep neighbors in the limited field of view for position estimation. The approach is robust to temporary tracking loss and directly synthesizes control in real time to stabilize visual contact through control Lyapunov-barrier functions. The main contributions of this paper are a continuous-time robust trajectory generation and control method certified by control barrier functions for distributed multi-robot systems and a discrete optimization procedure, namely, MPC-CBF, to approximate the certified controller. In addition, we propose a linear surrogate of high-order control barrier function constraints and use sequential quadratic programming to solve MPC-CBF efficiently. We demonstrate results in simulation with 10 robots and physical experiments with 2 custom-built UAVs. To the best of our knowledge, this work is the first of its kind to generate a robust continuous-time trajectory and controller concurrently, certified by control barrier functions utilizing piecewise splines.
Systematic analysis of requirements for socially acceptable service robots
Sep 13, 2024In modern society, service robots are increasingly recognized for their wide range of practical applications. In large and crowded social spaces, such as museums and hospitals, these robots are required to safely move in the environment while exhibiting user-friendly behavior. Ensuring the safe and socially acceptable operation of robots in such settings presents several challenges. To enhance the social acceptance in the design process of service robots, we present a systematic analysis of requirements, categorized into functional and non-functional. These requirements are further classified into different categories, with a single requirement potentially belonging to multiple categories. Finally, considering the specific case of a receptionist robotic agent, we discuss the requirements it should possess to ensure social acceptance.
CBF-Based Motion Planning for Socially Responsible Robot Navigation Guaranteeing STL Specification
Mar 30, 2024



In the field of control engineering, the connection between Signal Temporal Logic (STL) and time-varying Control Barrier Functions (CBF) has attracted considerable attention. CBFs have demonstrated notable success in ensuring the safety of critical applications by imposing constraints on system states, while STL allows for precisely specifying spatio-temporal constraints on the behavior of robotic systems. Leveraging these methodologies, this paper addresses the safety-critical navigation problem, in Socially Responsible Navigation (SRN) context, presenting a CBF-based STL motion planning methodology. This methodology enables task completion at any time within a specified time interval considering a dynamic system subject to velocity constraints. The proposed approach involves real-time computation of a smooth CBF, with the computation of a dynamically adjusted parameter based on the available path space and the maximum allowable velocity. A simulation study is conducted to validate the methodology, ensuring safety in the presence of static and dynamic obstacles and demonstrating its compliance with spatio-temporal constraints under non-linear velocity constraints.
Follow me: an architecture for user identification and social navigation with a mobile robot
Mar 30, 2024


Over the past decade, a multitude of service robots have been developed to fulfill a wide range of practical purposes. Notably, roles such as reception and robotic guidance have garnered extensive popularity. In these positions, robots are progressively assuming the responsibilities traditionally held by human staff in assisting customers. Ensuring the safe and socially acceptable operation of robots in such environments poses a fundamental challenge within the context of Socially Responsible Navigation (SRN). This article presents an architecture for user identification and social navigation with a mobile robot that employs computer vision, machine learning, and artificial intelligence algorithms to identify and guide users in a social navigation context, thereby providing an intuitive and user-friendly experience with the robot.
CBF-Based STL Motion Planning for Social Navigation in Crowded Environment
Mar 30, 2024

A motion planning methodology based on the combination of Control Barrier Functions (CBF) and Signal Temporal Logic (STL) is employed in this paper. This methodology allows task completion at any point within a specified time interval, considering a dynamic system subject to velocity constraints. In this work, we apply this approach into the context of Socially Responsible Navigation (SRN), introducing a rotation constraint. This constraint is designed to maintain the user within the robot's field of view (FOV), enhancing human-robot interaction with the concept of side-by-side human-robot companion. This angular constraint offers the possibility to customize social navigation to specific needs, thereby enabling safe SRN. Its validation is carried out through simulations demonstrating the system's effectiveness in adhering to spatio-temporal constraints, including those related to robot velocity, rotation, and the presence of static and dynamic obstacles.
A Mixed Reality System for Interaction with Heterogeneous Robotic Systems
Jul 12, 2023The growing spread of robots for service and industrial purposes calls for versatile, intuitive and portable interaction approaches. In particular, in industrial environments, operators should be able to interact with robots in a fast, effective, and possibly effortless manner. To this end, reality enhancement techniques have been used to achieve efficient management and simplify interactions, in particular in manufacturing and logistics processes. Building upon this, in this paper we propose a system based on mixed reality that allows a ubiquitous interface for heterogeneous robotic systems in dynamic scenarios, where users are involved in different tasks and need to interact with different robots. By means of mixed reality, users can interact with a robot through manipulation of its virtual replica, which is always colocated with the user and is extracted when interaction is needed. The system has been tested in a simulated intralogistics setting, where different robots are present and require sporadic intervention by human operators, who are involved in other tasks. In our setting we consider the presence of drones and AGVs with different levels of autonomy, calling for different user interventions. The proposed approach has been validated in virtual reality, considering quantitative and qualitative assessment of performance and user's feedback.
Improved path planning algorithms for non-holonomic autonomous vehicles in industrial environments with narrow corridors: Roadmap Hybrid A* and Waypoints Hybrid B*. Roadmap hybrid A* and Waypoints hybrid A* Pseudocodes
Apr 27, 2023This paper proposes two novel path planning algorithms, Roadmap Hybrid A* and Waypoints Hybrid A*, for car-like autonomous vehicles in logistics and industrial contexts with obstacles (e.g., pallets or containers) and narrow corridors. Roadmap Hybrid A* combines Hybrid A* with a graph search algorithm applied to a static roadmap. The former enables obstacle avoidance and flexibility, whereas the latter provides greater robustness, repeatability, and computational speed. Waypoint Hybrid A*, on the other hand, generates waypoints using a topological map of the environment to guide Hybrid A* to the target pose, reducing complexity and search time. Both algorithms enable predetermined control over the shape of desired parts of the path, for example, to obtain precise docking maneuvers to service machines and to eliminate unnecessary steering changes produced by Hybrid A* in corridors, thanks to the roadmap and/or the waypoints. To evaluate the performance of these algorithms, we conducted a simulation study in an industrial plant where a robot must navigate narrow corridors to serve machines in different areas. In terms of computational time, total length, reverse length path, and other metrics, both algorithms outperformed the standard Hybrid A*.
A Complete Set of Connectivity-aware Local Topology Manipulation Operations for Robot Swarms
Oct 04, 2022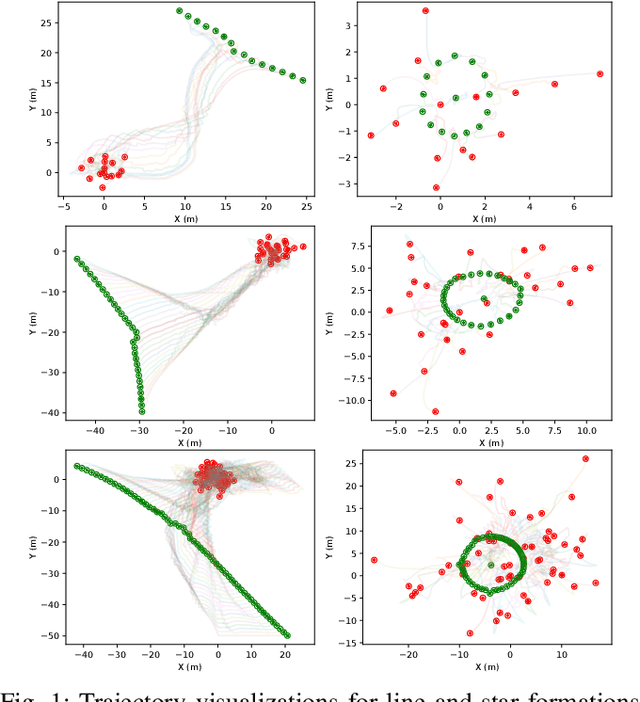
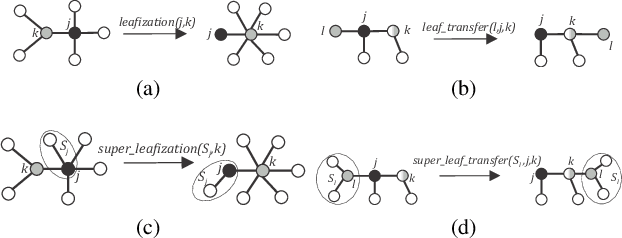
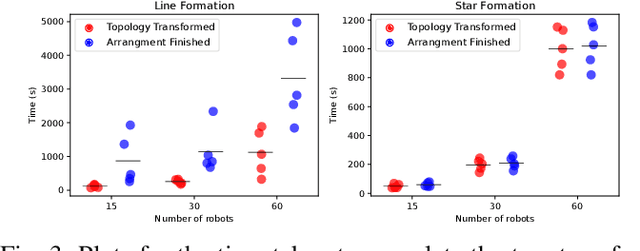
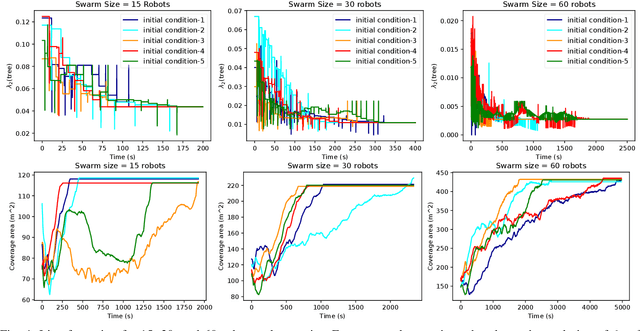
The topology of a robotic swarm affects the convergence speed of consensus and the mobility of the robots. In this paper, we prove the existence of a complete set of local topology manipulation operations that allow the transformation of a swarm topology. The set is complete in the sense that any other possible set of manipulation operations can be performed by a sequence of operations from our set. The operations are local as they depend only on the first and second hop neighbors' information to transform any initial spanning tree of the network's graph to any other connected tree with the same number of nodes. The flexibility provided by our method is similar to global methods that require full knowledge of the swarm network. We prove the existence of a sequence of transformations for any tree-to-tree transformation, and derive sequences of operations to form a line or star from any initial spanning tree. Our work provides a theoretical and practical framework for topological control of a swarm, establishing global properties using only local information.