 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring Human-Robot Collaboration: Analysis of Interaction Modalities in Challenging Tasks
May 13, 2026This work compares three interaction modalities for human-robot collaboration: passive, reactive, and proactive. We studied 18 participants assembling a seven-layer colored tower from memory while using nearby and distant blocks. In the passive modality participants worked alone; in the reactive modality a mobile robot helped only upon request; in the proactive modality it initiated brick delivery and error signaling without explicit requests. Although robot assistance increased completion time, most participants preferred collaboration: 67% preferred proactive behavior and 78% judged it most useful. These results suggest that timely proactive support can improve user experience in controlled collaborative tasks.
Systematic analysis of requirements for socially acceptable service robots
Sep 13, 2024In modern society, service robots are increasingly recognized for their wide range of practical applications. In large and crowded social spaces, such as museums and hospitals, these robots are required to safely move in the environment while exhibiting user-friendly behavior. Ensuring the safe and socially acceptable operation of robots in such settings presents several challenges. To enhance the social acceptance in the design process of service robots, we present a systematic analysis of requirements, categorized into functional and non-functional. These requirements are further classified into different categories, with a single requirement potentially belonging to multiple categories. Finally, considering the specific case of a receptionist robotic agent, we discuss the requirements it should possess to ensure social acceptance.
CoBT: Collaborative Programming of Behaviour Trees from One Demonstration for Robot Manipulation
Apr 10, 2024



Mass customization and shorter manufacturing cycles are becoming more important among small and medium-sized companies. However, classical industrial robots struggle to cope with product variation and dynamic environments. In this paper, we present CoBT, a collaborative programming by demonstration framework for generating reactive and modular behavior trees. CoBT relies on a single demonstration and a combination of data-driven machine learning methods with logic-based declarative learning to learn a task, thus eliminating the need for programming expertise or long development times. The proposed framework is experimentally validated on 7 manipulation tasks and we show that CoBT achieves approx. 93% success rate overall with an average of 7.5s programming time. We conduct a pilot study with non-expert users to provide feedback regarding the usability of CoBT.
CBF-Based Motion Planning for Socially Responsible Robot Navigation Guaranteeing STL Specification
Mar 30, 2024



In the field of control engineering, the connection between Signal Temporal Logic (STL) and time-varying Control Barrier Functions (CBF) has attracted considerable attention. CBFs have demonstrated notable success in ensuring the safety of critical applications by imposing constraints on system states, while STL allows for precisely specifying spatio-temporal constraints on the behavior of robotic systems. Leveraging these methodologies, this paper addresses the safety-critical navigation problem, in Socially Responsible Navigation (SRN) context, presenting a CBF-based STL motion planning methodology. This methodology enables task completion at any time within a specified time interval considering a dynamic system subject to velocity constraints. The proposed approach involves real-time computation of a smooth CBF, with the computation of a dynamically adjusted parameter based on the available path space and the maximum allowable velocity. A simulation study is conducted to validate the methodology, ensuring safety in the presence of static and dynamic obstacles and demonstrating its compliance with spatio-temporal constraints under non-linear velocity constraints.
CBF-Based STL Motion Planning for Social Navigation in Crowded Environment
Mar 30, 2024

A motion planning methodology based on the combination of Control Barrier Functions (CBF) and Signal Temporal Logic (STL) is employed in this paper. This methodology allows task completion at any point within a specified time interval, considering a dynamic system subject to velocity constraints. In this work, we apply this approach into the context of Socially Responsible Navigation (SRN), introducing a rotation constraint. This constraint is designed to maintain the user within the robot's field of view (FOV), enhancing human-robot interaction with the concept of side-by-side human-robot companion. This angular constraint offers the possibility to customize social navigation to specific needs, thereby enabling safe SRN. Its validation is carried out through simulations demonstrating the system's effectiveness in adhering to spatio-temporal constraints, including those related to robot velocity, rotation, and the presence of static and dynamic obstacles.
Follow me: an architecture for user identification and social navigation with a mobile robot
Mar 30, 2024


Over the past decade, a multitude of service robots have been developed to fulfill a wide range of practical purposes. Notably, roles such as reception and robotic guidance have garnered extensive popularity. In these positions, robots are progressively assuming the responsibilities traditionally held by human staff in assisting customers. Ensuring the safe and socially acceptable operation of robots in such environments poses a fundamental challenge within the context of Socially Responsible Navigation (SRN). This article presents an architecture for user identification and social navigation with a mobile robot that employs computer vision, machine learning, and artificial intelligence algorithms to identify and guide users in a social navigation context, thereby providing an intuitive and user-friendly experience with the robot.
A Mixed Reality System for Interaction with Heterogeneous Robotic Systems
Jul 12, 2023The growing spread of robots for service and industrial purposes calls for versatile, intuitive and portable interaction approaches. In particular, in industrial environments, operators should be able to interact with robots in a fast, effective, and possibly effortless manner. To this end, reality enhancement techniques have been used to achieve efficient management and simplify interactions, in particular in manufacturing and logistics processes. Building upon this, in this paper we propose a system based on mixed reality that allows a ubiquitous interface for heterogeneous robotic systems in dynamic scenarios, where users are involved in different tasks and need to interact with different robots. By means of mixed reality, users can interact with a robot through manipulation of its virtual replica, which is always colocated with the user and is extracted when interaction is needed. The system has been tested in a simulated intralogistics setting, where different robots are present and require sporadic intervention by human operators, who are involved in other tasks. In our setting we consider the presence of drones and AGVs with different levels of autonomy, calling for different user interventions. The proposed approach has been validated in virtual reality, considering quantitative and qualitative assessment of performance and user's feedback.
MATE robots simplifying my work: benefits and socio-ethical implications
Feb 19, 2018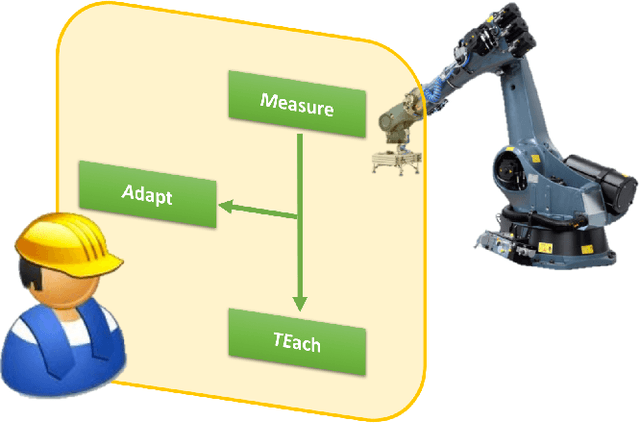
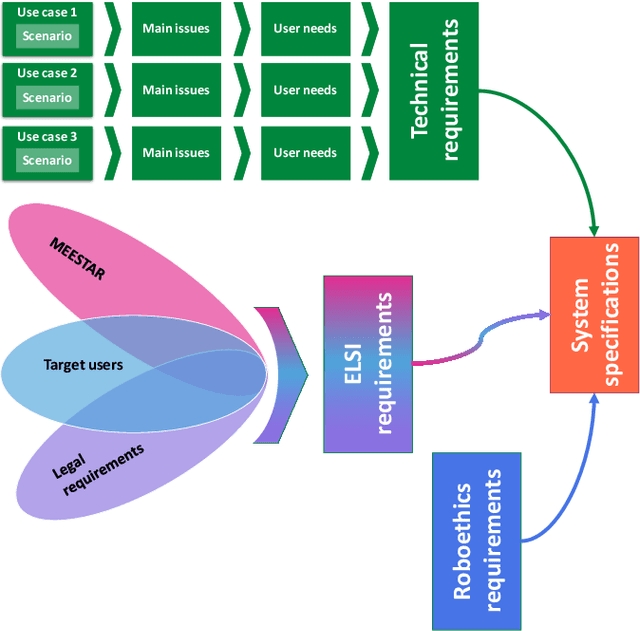
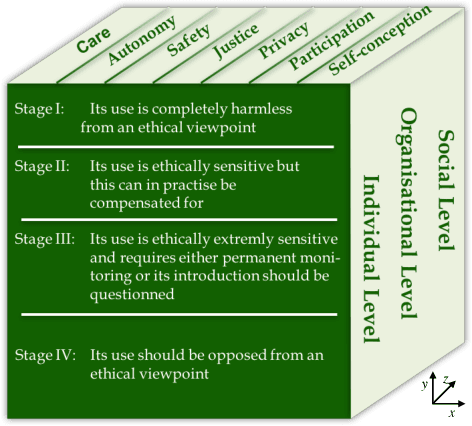
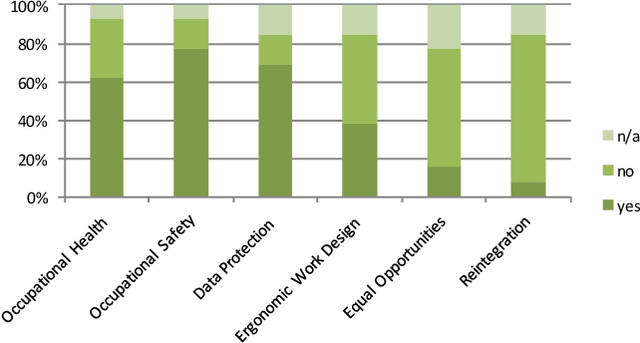
With the increasing complexity of modern industrial automatic and robotic systems, an increasing burden is put on the operators, who are requested to supervise and interact with very complex systems, typically under challenging and stressful conditions. To overcome this issue, it is necessary to adopt a responsible approach based on the anthropocentric design methodology, such that machines adapt to the humans capabilities, and not vice versa. Moving along these lines, in this paper we consider an integrated methodological design approach, which we call MATE, consisting in devising complex automatic or robotic solutions that measure current operator's status, adapting the interaction accordingly, and providing her/him with proper training to improve the interaction and learn lacking skills and expertise. Accordingly, a MATE system is intended to be easily usable for all users, thus meeting the principles of inclusive design. Using such a MATE system gives rise to several ethical and social implications, which are discussed in this paper. Additionally, a discussion about which factors in the organization of companies are critical with respect to the introduction of a MATE system is presented.
Interacting With a Mobile Robot with a Natural Infrastructure-Less Interface
Apr 04, 2017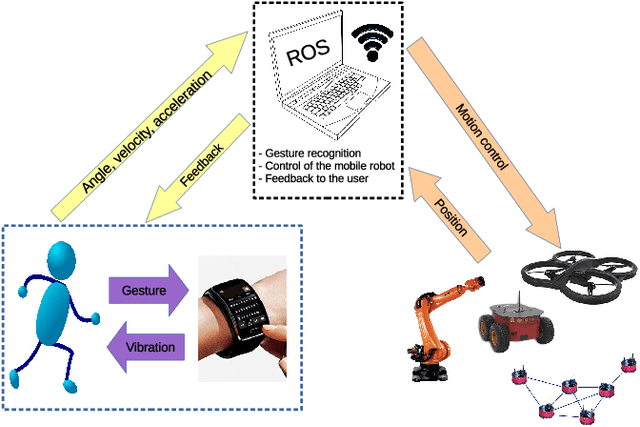
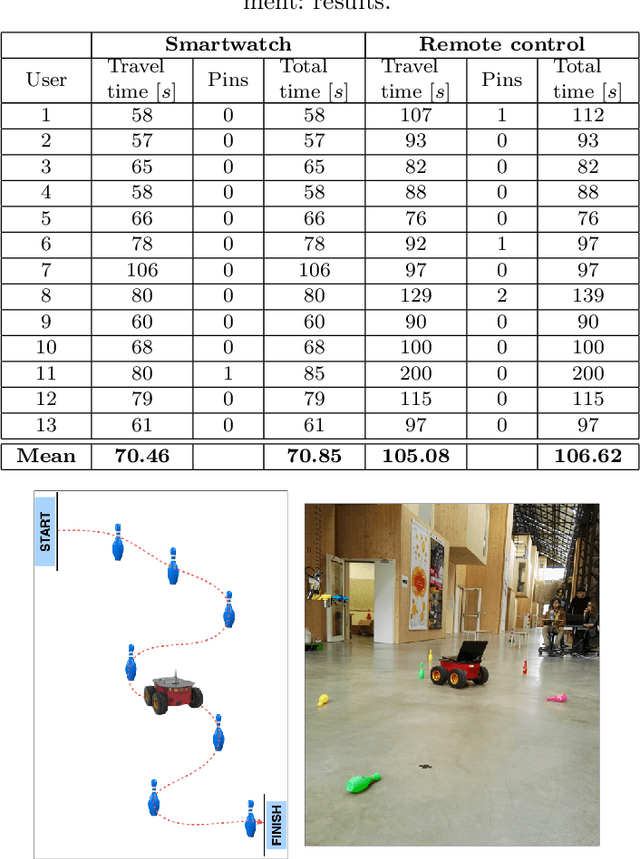
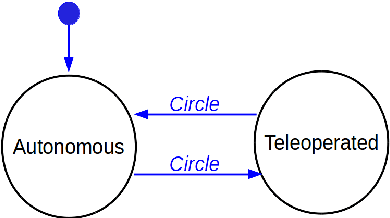
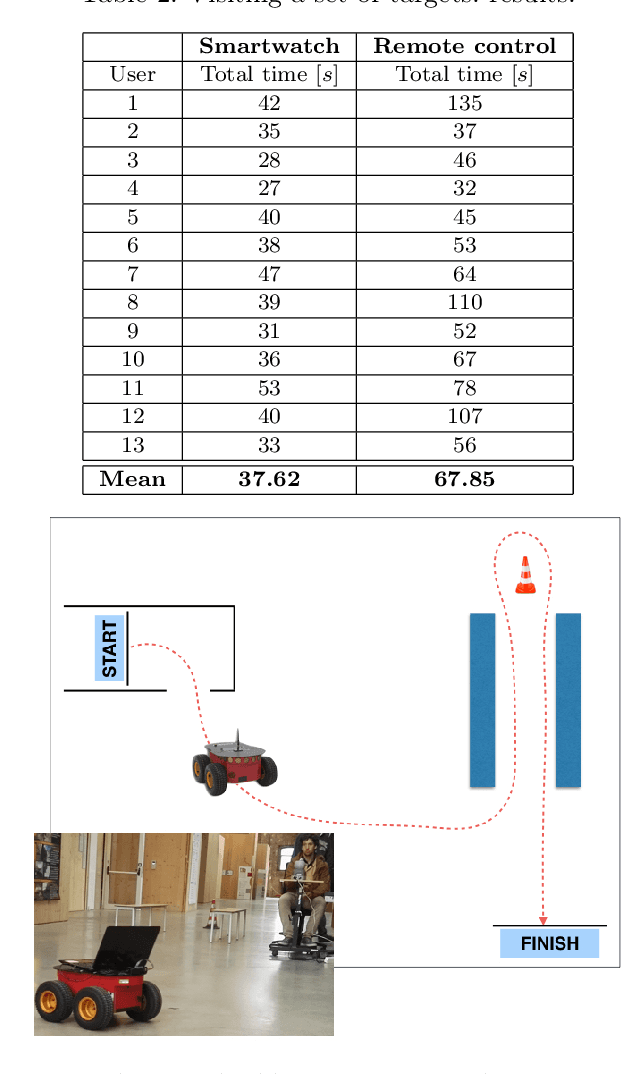
In this paper we introduce a novel approach that enables users to interact with a mobile robot in a natural manner. The proposed interaction system does not require any specific infrastructure or device, but relies on commonly utilized objects while leaving the user's hands free. Specifically, we propose to utilize a smartwatch (or a sensorized wristband) for recognizing the motion of the user's forearm. Measurements of accelerations and angular velocities are exploited to recognize user's gestures and define velocity commands for the robot. The proposed interaction system is evaluated experimentally with different users controlling a mobile robot and compared to the use of a remote control device for the teleoperation of robots. Results show that the usability and effectiveness of the proposed natural interaction system based on the use of a smartwatch provide significant improvement in the human-robot interaction experience.