 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Mixed Reality System for Interaction with Heterogeneous Robotic Systems
Jul 12, 2023The growing spread of robots for service and industrial purposes calls for versatile, intuitive and portable interaction approaches. In particular, in industrial environments, operators should be able to interact with robots in a fast, effective, and possibly effortless manner. To this end, reality enhancement techniques have been used to achieve efficient management and simplify interactions, in particular in manufacturing and logistics processes. Building upon this, in this paper we propose a system based on mixed reality that allows a ubiquitous interface for heterogeneous robotic systems in dynamic scenarios, where users are involved in different tasks and need to interact with different robots. By means of mixed reality, users can interact with a robot through manipulation of its virtual replica, which is always colocated with the user and is extracted when interaction is needed. The system has been tested in a simulated intralogistics setting, where different robots are present and require sporadic intervention by human operators, who are involved in other tasks. In our setting we consider the presence of drones and AGVs with different levels of autonomy, calling for different user interventions. The proposed approach has been validated in virtual reality, considering quantitative and qualitative assessment of performance and user's feedback.
Decentralized Connectivity Maintenance with Time Delays using Control Barrier Functions
Mar 23, 2021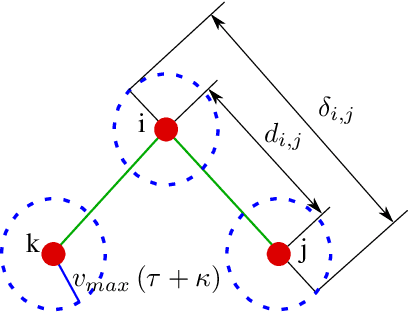
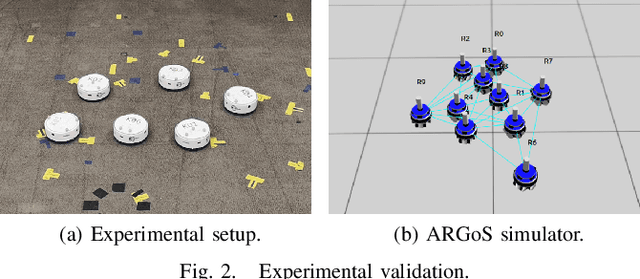
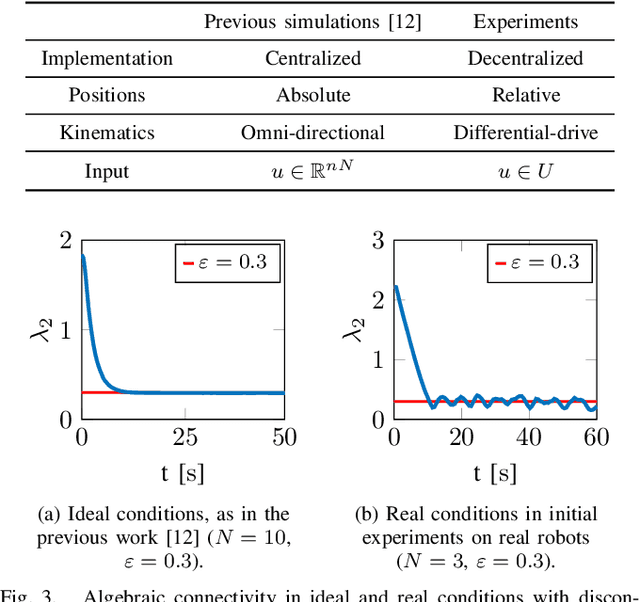
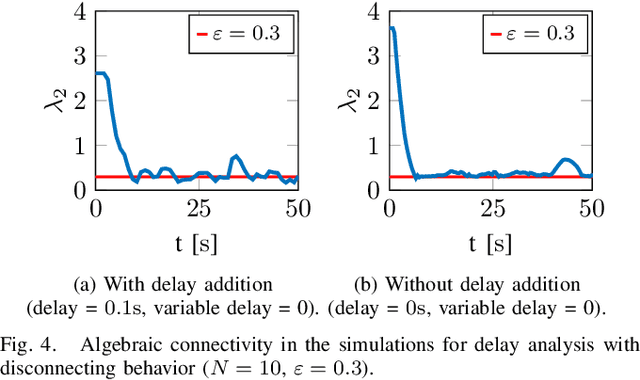
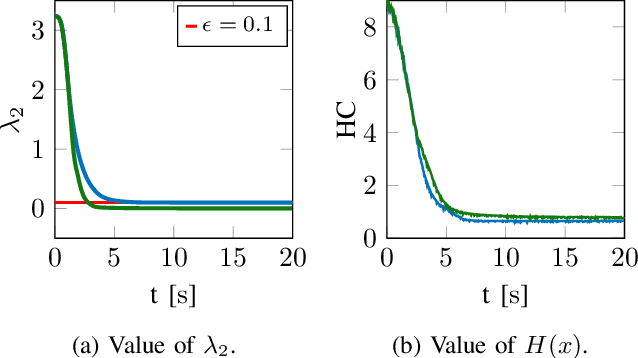
Connectivity maintenance is crucial for the real world deployment of multi-robot systems, as it ultimately allows the robots to communicate, coordinate and perform tasks in a collaborative way. A connectivity maintenance controller must keep the multi-robot system connected independently from the system's mission and in the presence of undesired real world effects such as communication delays, model errors, and computational time delays, among others. In this paper we present the implementation, on a real robotic setup, of a connectivity maintenance control strategy based on Control Barrier Functions. During experimentation, we found that the presence of communication delays has a significant impact on the performance of the controlled system, with respect to the ideal case. We propose a heuristic to counteract the effects of communication delays, and we verify its efficacy both in simulation and with physical robot experiments.
Connectivity Maintenance: Global and Optimized approach through Control Barrier Functions
Mar 23, 2020


Connectivity maintenance is an essential aspect to consider while controlling a multi-robot system. In general, a multi-robot system should be connected to obtain a certain common objective. Connectivity must be kept regardless of the control strategy or the objective of the multi-robot system. Two main methods exist for connectivity maintenance: keep the initial connections (local connectivity) or allow modifications to the initial connections, but always keeping the overall system connected (global connectivity). In this paper we present a method that allows, at the same time, to maintain global connectivity and to implement the desired control strategy (e.g., consensus, formation control, coverage), all in an optimized fashion. For this purpose, we defined and implemented a Control Barrier Function that can incorporate constraints and objectives. We provide a mathematical proof of the method, and we demonstrate its versatility with simulations of different applications.