 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Connectivity Maintenance with Time Delays using Control Barrier Functions
Paper and Code
Mar 23, 2021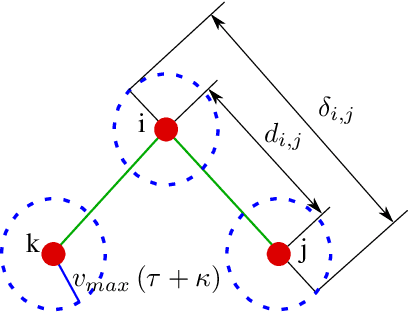
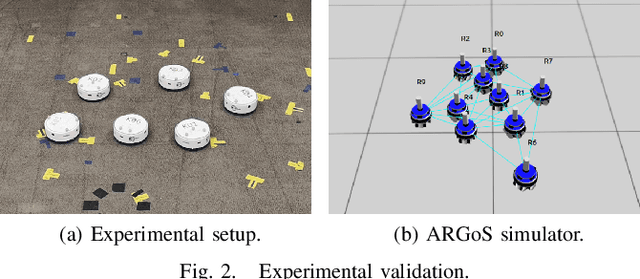
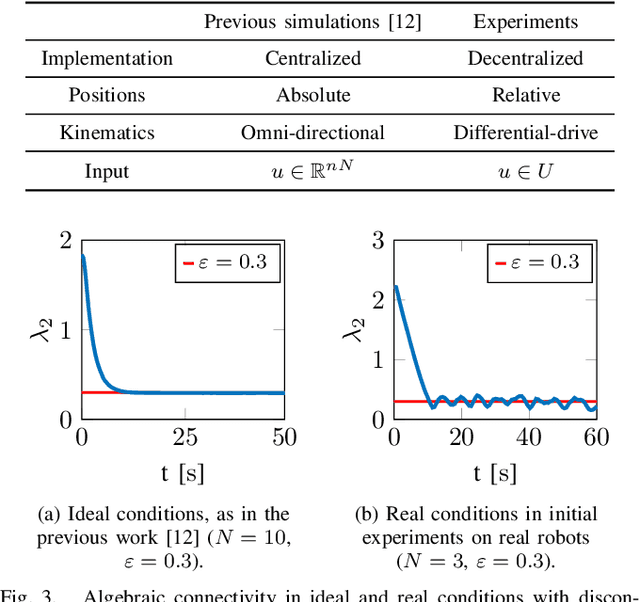
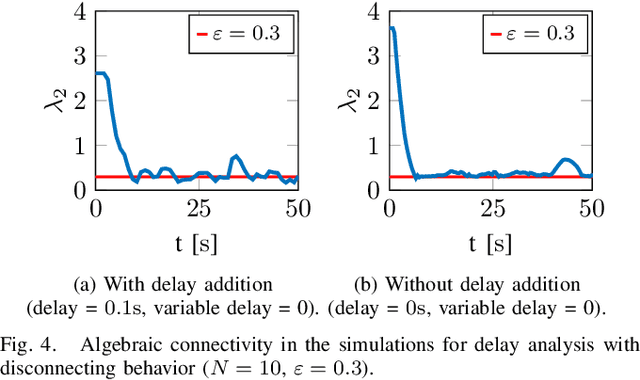
Connectivity maintenance is crucial for the real world deployment of multi-robot systems, as it ultimately allows the robots to communicate, coordinate and perform tasks in a collaborative way. A connectivity maintenance controller must keep the multi-robot system connected independently from the system's mission and in the presence of undesired real world effects such as communication delays, model errors, and computational time delays, among others. In this paper we present the implementation, on a real robotic setup, of a connectivity maintenance control strategy based on Control Barrier Functions. During experimentation, we found that the presence of communication delays has a significant impact on the performance of the controlled system, with respect to the ideal case. We propose a heuristic to counteract the effects of communication delays, and we verify its efficacy both in simulation and with physical robot experiments.