 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUser-Tailored Learning to Forecast Walking Modes for Exosuits
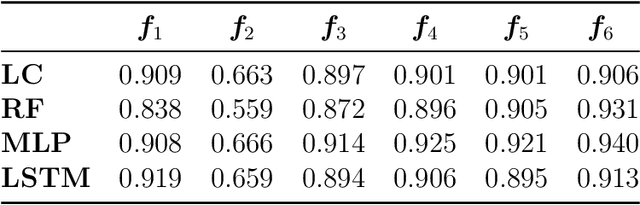
Mar 16, 2026Assistive robotic devices, like soft lower-limb exoskeletons or exosuits, are widely spreading with the promise of helping people in everyday life. To make such systems adaptive to the variety of users wearing them, it is desirable to endow exosuits with advanced perception systems. However, exosuits have little sensory equipment because they need to be light and easy to wear. This paper presents a perception module based on machine learning that aims at estimating 3 walking modes (i.e., ascending or descending stairs and walking on level ground) of users wearing an exosuit. We tackle this perception problem using only inertial data from two sensors. Our approach provides an estimate for both future and past timesteps that supports control and enables a self-labeling procedure for online model adaptation. Indeed, we show that our estimate can label data acquired online and refine the model for new users. A thorough analysis carried out on real-life datasets shows the effectiveness of our user-tailored perception module. Finally, we integrate our system with the exosuit in a closed-loop controller, validating its performance in an online single-subject experiment.
A Map-free Deep Learning-based Framework for Gate-to-Gate Monocular Visual Navigation aboard Miniaturized Aerial Vehicles
Mar 07, 2025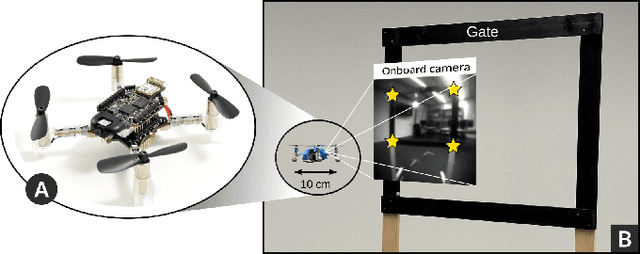


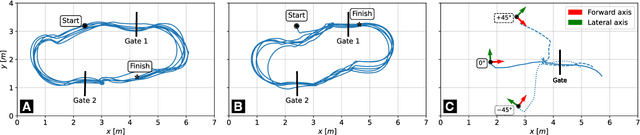
Palm-sized autonomous nano-drones, i.e., sub-50g in weight, recently entered the drone racing scenario, where they are tasked to avoid obstacles and navigate as fast as possible through gates. However, in contrast with their bigger counterparts, i.e., kg-scale drones, nano-drones expose three orders of magnitude less onboard memory and compute power, demanding more efficient and lightweight vision-based pipelines to win the race. This work presents a map-free vision-based (using only a monocular camera) autonomous nano-drone that combines a real-time deep learning gate detection front-end with a classic yet elegant and effective visual servoing control back-end, only relying on onboard resources. Starting from two state-of-the-art tiny deep learning models, we adapt them for our specific task, and after a mixed simulator-real-world training, we integrate and deploy them aboard our nano-drone. Our best-performing pipeline costs of only 24M multiply-accumulate operations per frame, resulting in a closed-loop control performance of 30 Hz, while achieving a gate detection root mean square error of 1.4 pixels, on our ~20k real-world image dataset. In-field experiments highlight the capability of our nano-drone to successfully navigate through 15 gates in 4 min, never crashing and covering a total travel distance of ~100m, with a peak flight speed of 1.9 m/s. Finally, to stress the generalization capability of our system, we also test it in a never-seen-before environment, where it navigates through gates for more than 4 min.
Sixth-Sense: Self-Supervised Learning of Spatial Awareness of Humans from a Planar Lidar
Feb 28, 2025Localizing humans is a key prerequisite for any service robot operating in proximity to people. In these scenarios, robots rely on a multitude of state-of-the-art detectors usually designed to operate with RGB-D cameras or expensive 3D LiDARs. However, most commercially available service robots are equipped with cameras with a narrow field of view, making them blind when a user is approaching from other directions, or inexpensive 1D LiDARs whose readings are difficult to interpret. To address these limitations, we propose a self-supervised approach to detect humans and estimate their 2D pose from 1D LiDAR data, using detections from an RGB-D camera as a supervision source. Our approach aims to provide service robots with spatial awareness of nearby humans. After training on 70 minutes of data autonomously collected in two environments, our model is capable of detecting humans omnidirectionally from 1D LiDAR data in a novel environment, with 71% precision and 80% recall, while retaining an average absolute error of 13 cm in distance and 44{\deg} in orientation.
Learning Hand State Estimation for a Light Exoskeleton
Nov 14, 2024



We propose a machine learning-based estimator of the hand state for rehabilitation purposes, using light exoskeletons. These devices are easy to use and useful for delivering domestic and frequent therapies. We build a supervised approach using information from the muscular activity of the forearm and the motion of the exoskeleton to reconstruct the hand's opening degree and compliance level. Such information can be used to evaluate the therapy progress and develop adaptive control behaviors. Our approach is validated with a real light exoskeleton. The experiments demonstrate good predictive performance of our approach when trained on data coming from a single user and tested on the same user, even across different sessions. This generalization capability makes our system promising for practical use in real rehabilitation.
Hearing the Robot's Mind: Sonification for Explicit Feedback in Human-Robot Interaction
Nov 14, 2024Social robots are required not only to understand human intentions but also to effectively communicate their intentions or own internal states to users. This study explores the use of sonification to provide explicit auditory feedback, enhancing mutual understanding in HRI. We introduce a novel sonification approach that conveys the robot's internal state, linked to its perception of nearby individuals and their interaction intentions. The approach is evaluated through a two-fold user study: an online video-based survey with $26$ participants and live experiments with $10$ participants. Results indicate that while sonification improves the robot's expressivity and communication effectiveness, the design of the auditory feedback needs refinement to enhance user experience. Participants found the auditory cues useful but described the sounds as uninteresting and unpleasant. These findings underscore the importance of carefully designed auditory feedback in developing more effective and engaging HRI systems.
A Service Robot in the Wild: Analysis of Users Intentions, Robot Behaviors, and Their Impact on the Interaction
Oct 04, 2024



We consider a service robot that offers chocolate treats to people passing in its proximity: it has the capability of predicting in advance a person's intention to interact, and to actuate an "offering" gesture, subtly extending the tray of chocolates towards a given target. We run the system for more than 5 hours across 3 days and two different crowded public locations; the system implements three possible behaviors that are randomly toggled every few minutes: passive (e.g. never performing the offering gesture); or active, triggered by either a naive distance-based rule, or a smart approach that relies on various behavioral cues of the user. We collect a real-world dataset that includes information on 1777 users with several spontaneous human-robot interactions and study the influence of robot actions on people's behavior. Our comprehensive analysis suggests that users are more prone to engage with the robot when it proactively starts the interaction. We release the dataset and provide insights to make our work reproducible for the community. Also, we report qualitative observations collected during the acquisition campaign and identify future challenges and research directions in the domain of social human-robot interaction.
Systematic analysis of requirements for socially acceptable service robots
Sep 13, 2024In modern society, service robots are increasingly recognized for their wide range of practical applications. In large and crowded social spaces, such as museums and hospitals, these robots are required to safely move in the environment while exhibiting user-friendly behavior. Ensuring the safe and socially acceptable operation of robots in such settings presents several challenges. To enhance the social acceptance in the design process of service robots, we present a systematic analysis of requirements, categorized into functional and non-functional. These requirements are further classified into different categories, with a single requirement potentially belonging to multiple categories. Finally, considering the specific case of a receptionist robotic agent, we discuss the requirements it should possess to ensure social acceptance.
Direct Imitation Learning-based Visual Servoing using the Large Projection Formulation
Jun 13, 2024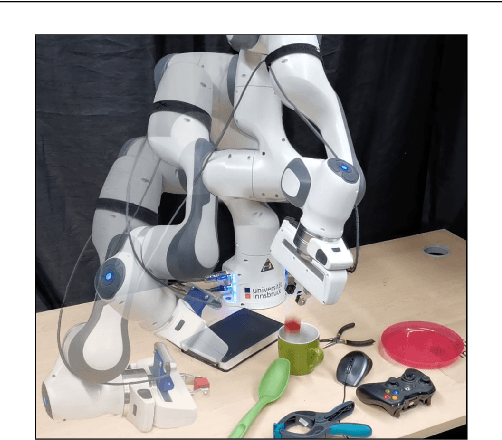

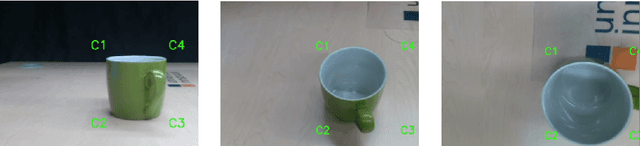
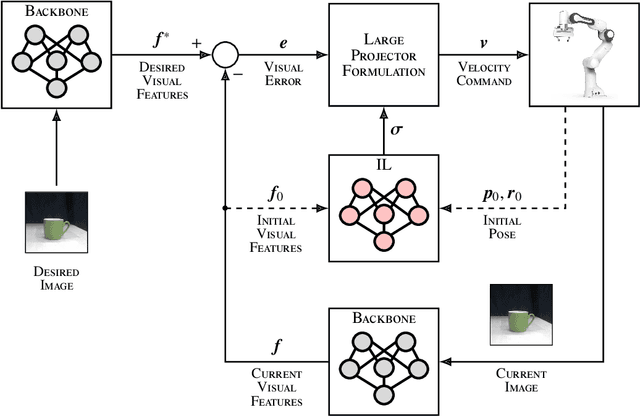
Today robots must be safe, versatile, and user-friendly to operate in unstructured and human-populated environments. Dynamical system-based imitation learning enables robots to perform complex tasks stably and without explicit programming, greatly simplifying their real-world deployment. To exploit the full potential of these systems it is crucial to implement closed loops that use visual feedback. Vision permits to cope with environmental changes, but is complex to handle due to the high dimension of the image space. This study introduces a dynamical system-based imitation learning for direct visual servoing. It leverages off-the-shelf deep learning-based perception backbones to extract robust features from the raw input image, and an imitation learning strategy to execute sophisticated robot motions. The learning blocks are integrated using the large projection task priority formulation. As demonstrated through extensive experimental analysis, the proposed method realizes complex tasks with a robotic manipulator.
Predicting the Intention to Interact with a Service Robot:the Role of Gaze Cues
Apr 02, 2024For a service robot, it is crucial to perceive as early as possible that an approaching person intends to interact: in this case, it can proactively enact friendly behaviors that lead to an improved user experience. We solve this perception task with a sequence-to-sequence classifier of a potential user intention to interact, which can be trained in a self-supervised way. Our main contribution is a study of the benefit of features representing the person's gaze in this context. Extensive experiments on a novel dataset show that the inclusion of gaze cues significantly improves the classifier performance (AUROC increases from 84.5% to 91.2%); the distance at which an accurate classification can be achieved improves from 2.4 m to 3.2 m. We also quantify the system's ability to adapt to new environments without external supervision. Qualitative experiments show practical applications with a waiter robot.
Self-Supervised Prediction of the Intention to Interact with a Service Robot
Sep 14, 2023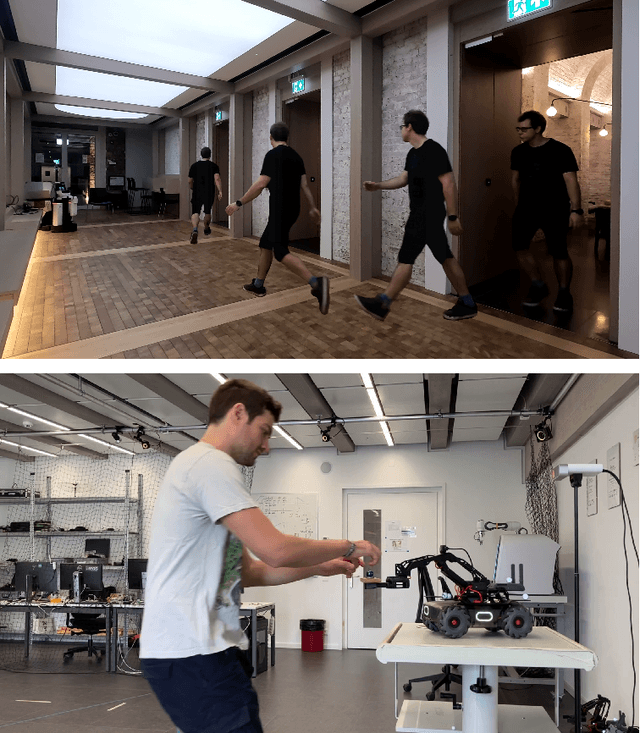
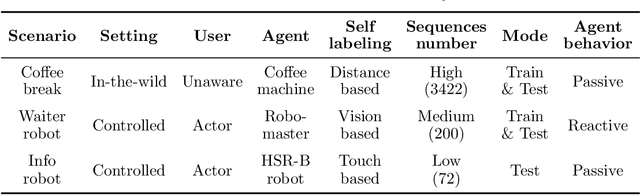
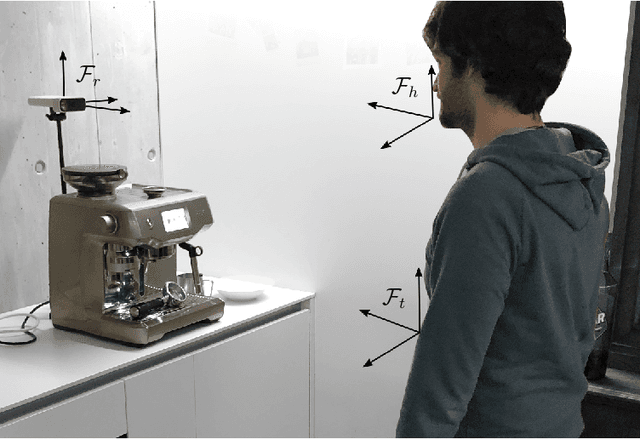
A service robot can provide a smoother interaction experience if it has the ability to proactively detect whether a nearby user intends to interact, in order to adapt its behavior e.g. by explicitly showing that it is available to provide a service. In this work, we propose a learning-based approach to predict the probability that a human user will interact with a robot before the interaction actually begins; the approach is self-supervised because after each encounter with a human, the robot can automatically label it depending on whether it resulted in an interaction or not. We explore different classification approaches, using different sets of features considering the pose and the motion of the user. We validate and deploy the approach in three scenarios. The first collects $3442$ natural sequences (both interacting and non-interacting) representing employees in an office break area: a real-world, challenging setting, where we consider a coffee machine in place of a service robot. The other two scenarios represent researchers interacting with service robots ($200$ and $72$ sequences, respectively). Results show that, even in challenging real-world settings, our approach can learn without external supervision, and can achieve accurate classification (i.e. AUROC greater than $0.9$) of the user's intention to interact with an advance of more than $3$s before the interaction actually occurs.