 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMATE robots simplifying my work: benefits and socio-ethical implications
Feb 19, 2018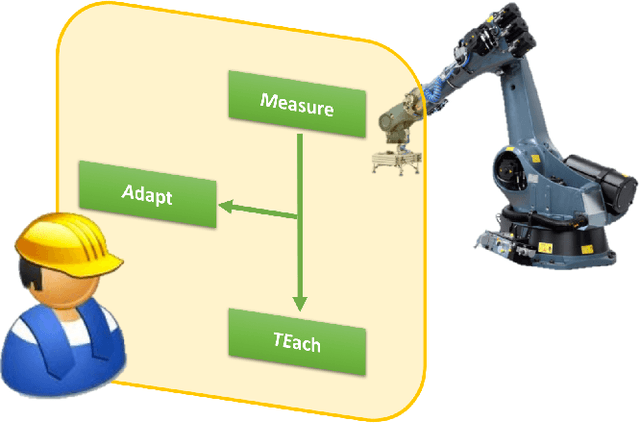
With the increasing complexity of modern industrial automatic and robotic systems, an increasing burden is put on the operators, who are requested to supervise and interact with very complex systems, typically under challenging and stressful conditions. To overcome this issue, it is necessary to adopt a responsible approach based on the anthropocentric design methodology, such that machines adapt to the humans capabilities, and not vice versa. Moving along these lines, in this paper we consider an integrated methodological design approach, which we call MATE, consisting in devising complex automatic or robotic solutions that measure current operator's status, adapting the interaction accordingly, and providing her/him with proper training to improve the interaction and learn lacking skills and expertise. Accordingly, a MATE system is intended to be easily usable for all users, thus meeting the principles of inclusive design. Using such a MATE system gives rise to several ethical and social implications, which are discussed in this paper. Additionally, a discussion about which factors in the organization of companies are critical with respect to the introduction of a MATE system is presented.
Interacting With a Mobile Robot with a Natural Infrastructure-Less Interface
Apr 04, 2017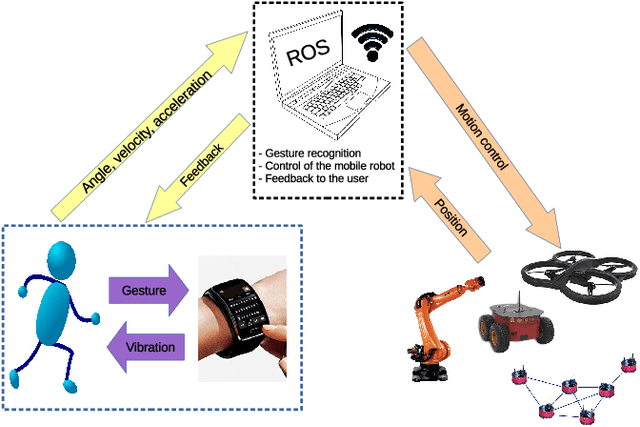
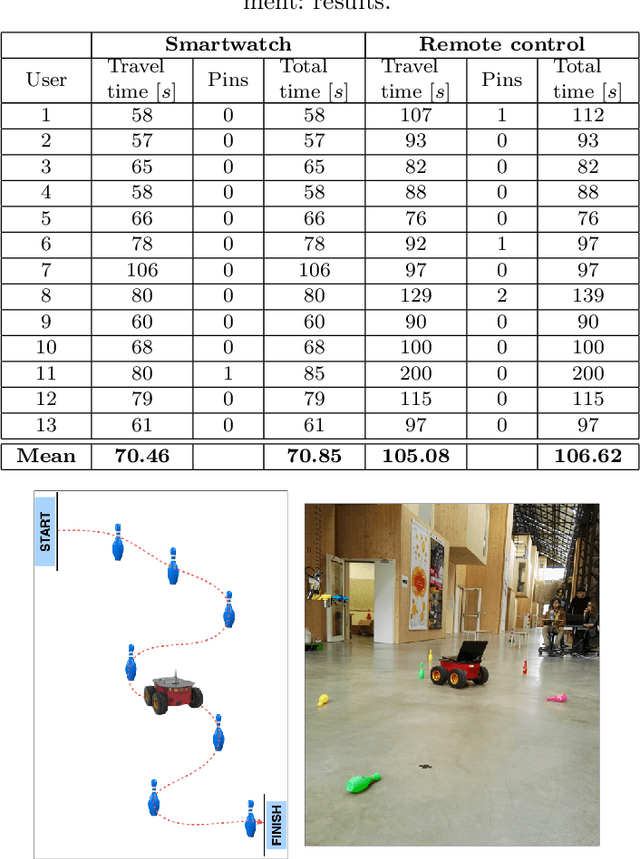
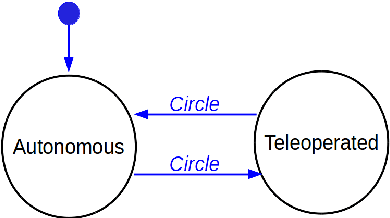
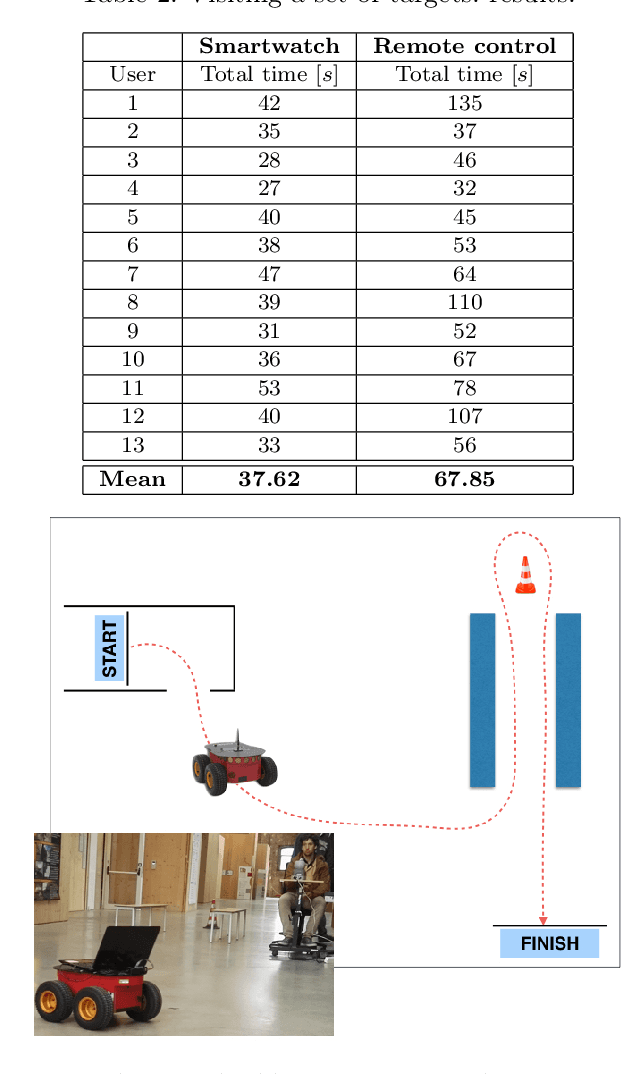
In this paper we introduce a novel approach that enables users to interact with a mobile robot in a natural manner. The proposed interaction system does not require any specific infrastructure or device, but relies on commonly utilized objects while leaving the user's hands free. Specifically, we propose to utilize a smartwatch (or a sensorized wristband) for recognizing the motion of the user's forearm. Measurements of accelerations and angular velocities are exploited to recognize user's gestures and define velocity commands for the robot. The proposed interaction system is evaluated experimentally with different users controlling a mobile robot and compared to the use of a remote control device for the teleoperation of robots. Results show that the usability and effectiveness of the proposed natural interaction system based on the use of a smartwatch provide significant improvement in the human-robot interaction experience.
Admittance Control Parameter Adaptation for Physical Human-Robot Interaction
Feb 27, 2017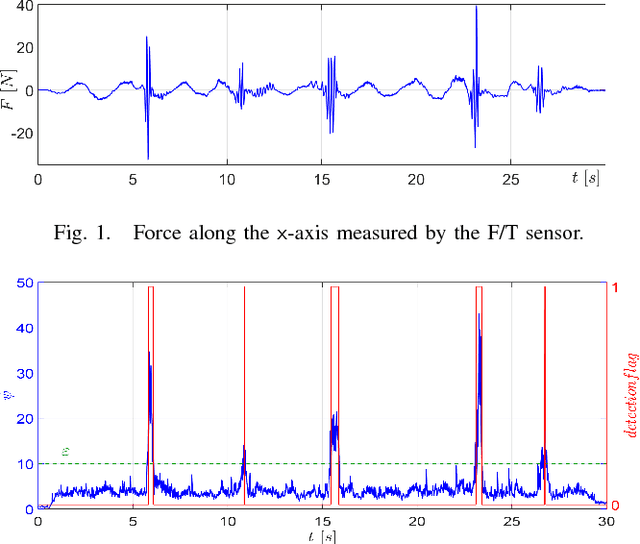
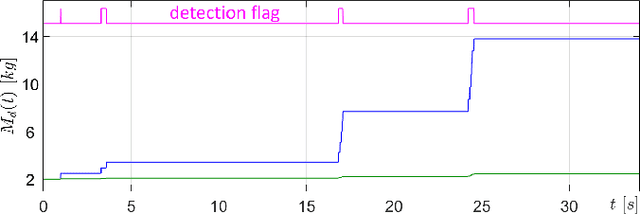
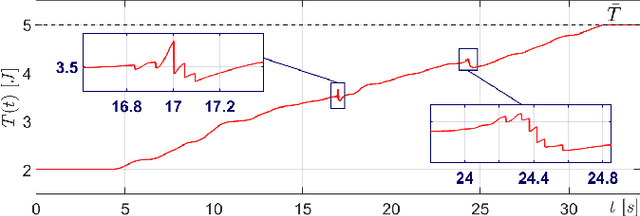
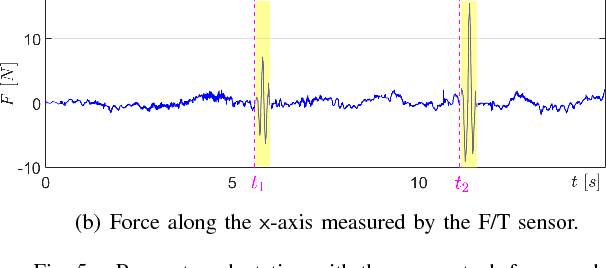
In physical human-robot interaction, the coexistence of robots and humans in the same workspace requires the guarantee of a stable interaction, trying to minimize the effort for the operator. To this aim, the admittance control is widely used and the appropriate selection of the its parameters is crucial, since they affect both the stability and the ability of the robot to interact with the user. In this paper, we present a strategy for detecting deviations from the nominal behavior of an admittance-controlled robot and for adapting the parameters of the controller while guaranteeing the passivity. The proposed methodology is validated on a KUKA LWR 4+.
Achieving the Desired Dynamic Behavior in Multi-Robot Systems Interacting with the Environment
Feb 19, 2017
In this paper we consider the problem of controlling the dynamic behavior of a multi-robot system while interacting with the environment. In particular, we propose a general methodology that, by means of locally scaling inter-robot coupling relationships, leads to achieving a desired interactive behavior. The proposed method is shown to guarantee passivity preservation, which ensures a safe interaction. The performance of the proposed methodology is evaluated in simulation, over large-scale multi-robot systems.