 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Dynamic Architecture for Task Assignment and Scheduling for Collaborative Robotic Cells
Apr 29, 2021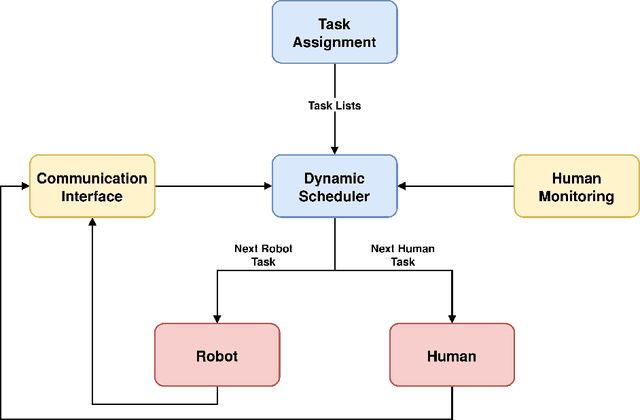

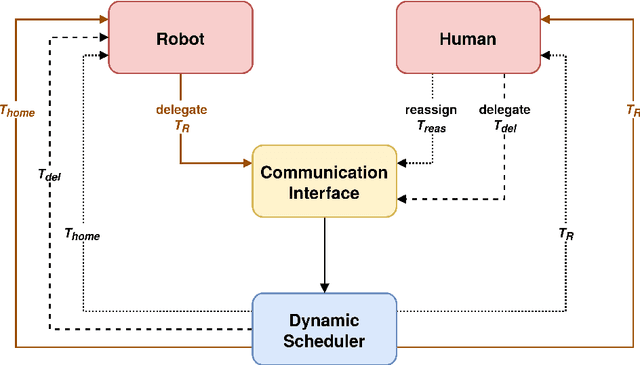
In collaborative robotic cells, a human operator and a robot share the workspace in order to execute a common job, consisting of a set of tasks. A proper allocation and scheduling of the tasks for the human and for the robot is crucial for achieving an efficient human-robot collaboration. In order to deal with the dynamic and unpredictable behavior of the human and for allowing the human and the robot to negotiate about the tasks to be executed, a two layers architecture for solving the task allocation and scheduling problem is proposed. The first layer optimally solves the task allocation problem considering nominal execution times. The second layer, which is reactive, adapts online the sequence of tasks to be executed by the robot considering deviations from the nominal behaviors and requests coming from the human and from robot. The proposed architecture is experimentally validated on a collaborative assembly job.
* arXiv admin note: text overlap with arXiv:2103.01831
Admittance Control Parameter Adaptation for Physical Human-Robot Interaction
Feb 27, 2017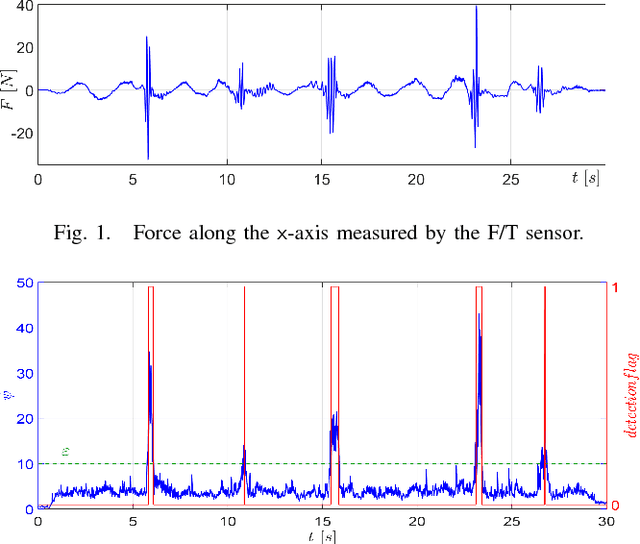
In physical human-robot interaction, the coexistence of robots and humans in the same workspace requires the guarantee of a stable interaction, trying to minimize the effort for the operator. To this aim, the admittance control is widely used and the appropriate selection of the its parameters is crucial, since they affect both the stability and the ability of the robot to interact with the user. In this paper, we present a strategy for detecting deviations from the nominal behavior of an admittance-controlled robot and for adapting the parameters of the controller while guaranteeing the passivity. The proposed methodology is validated on a KUKA LWR 4+.