Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdmittance Control Parameter Adaptation for Physical Human-Robot Interaction
Paper and Code
Feb 27, 2017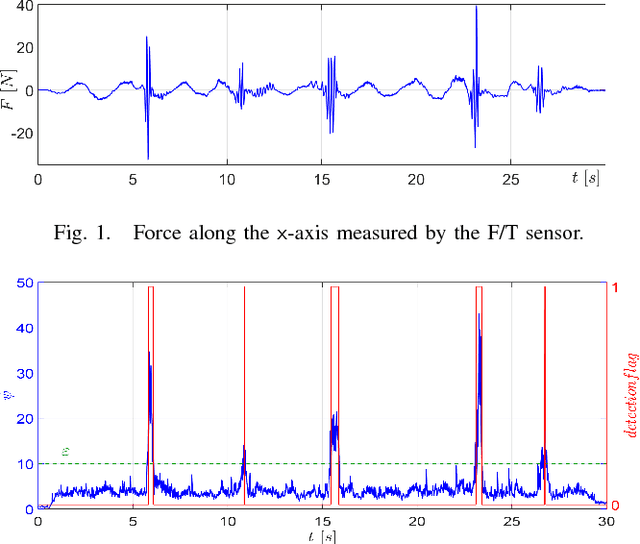
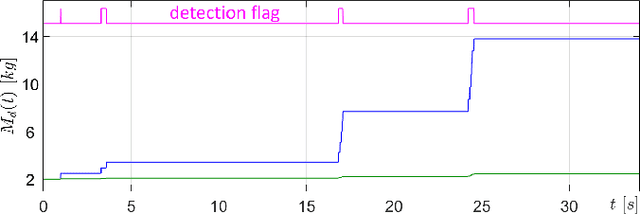
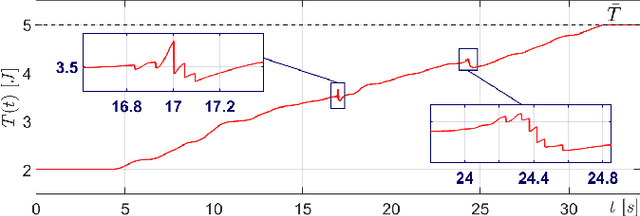
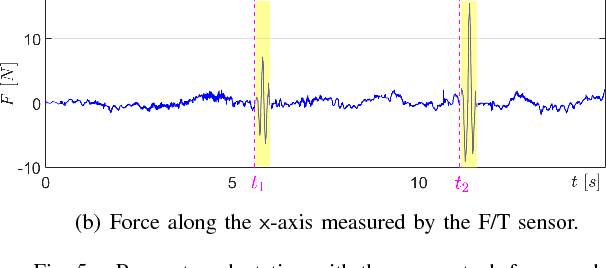
In physical human-robot interaction, the coexistence of robots and humans in the same workspace requires the guarantee of a stable interaction, trying to minimize the effort for the operator. To this aim, the admittance control is widely used and the appropriate selection of the its parameters is crucial, since they affect both the stability and the ability of the robot to interact with the user. In this paper, we present a strategy for detecting deviations from the nominal behavior of an admittance-controlled robot and for adapting the parameters of the controller while guaranteeing the passivity. The proposed methodology is validated on a KUKA LWR 4+.
* Proceedings of the IEEE International Conference on Robotics and
Automation (ICRA), 2017
View paper on