 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCongestion and Scalability in Robot Swarms: a Study on Collective Decision Making
Jul 17, 2023



One of the most important promises of decentralized systems is scalability, which is often assumed to be present in robot swarm systems without being contested. Simple limitations, such as movement congestion and communication conflicts, can drastically affect scalability. In this work, we study the effects of congestion in a binary collective decision-making task. We evaluate the impact of two types of congestion (communication and movement) when using three different techniques for the task: Honey Bee inspired, Stigmergy based, and Division of Labor. We deploy up to 150 robots in a physics-based simulator performing a sampling mission in an arena with variable levels of robot density, applying the three techniques. Our results suggest that applying Division of Labor coupled with versioned local communication helps to scale the system by minimizing congestion.
Collective transport via sequential caging
Jun 06, 2021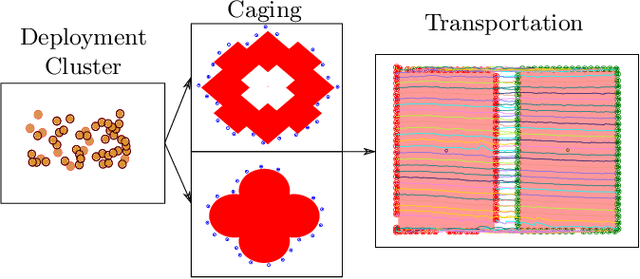

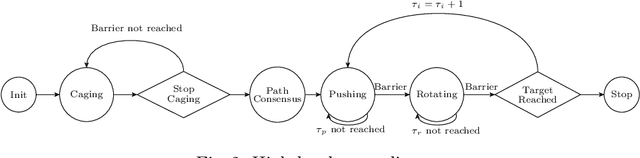
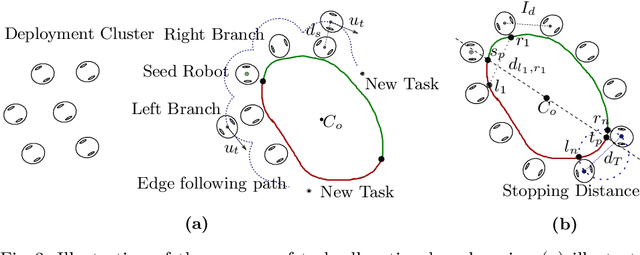
We propose a decentralized algorithm to collaboratively transport arbitrarily shaped objects using a swarm of robots. Our approach starts with a task allocation phase that sequentially distributes locations around the object to be transported starting from a seed robot that makes first contact with the object. Our approach does not require previous knowledge of the shape of the object to ensure caging. To push the object to a goal location, we estimate the robots required to apply force on the object based on the angular difference between the target and the object. During transport, the robots follow a sequence of intermediate goal locations specifying the required pose of the object at that location. We evaluate our approach in a physics-based simulator with up to 100 robots, using three generic paths. Experiments using a group of KheperaIV robots demonstrate the effectiveness of our approach in a real setting. Keywords: Collaborative transport, Task Allocation, Caging, Robot Swarms