 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized shape formation and force-based interactive formation control in robot swarms
Sep 03, 2023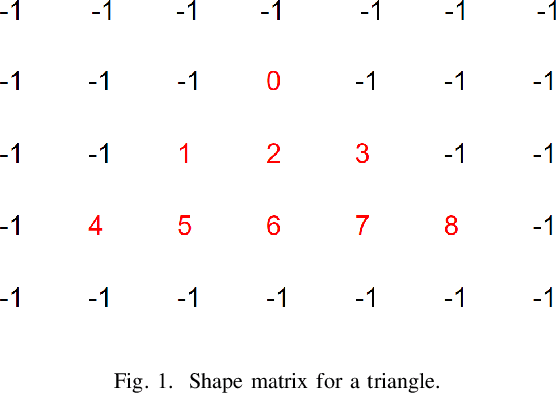
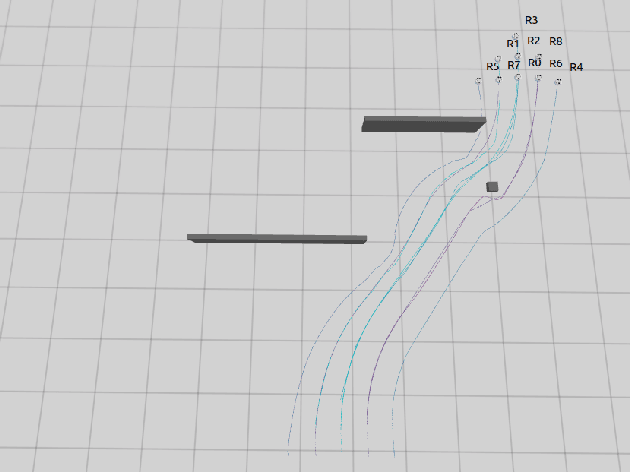
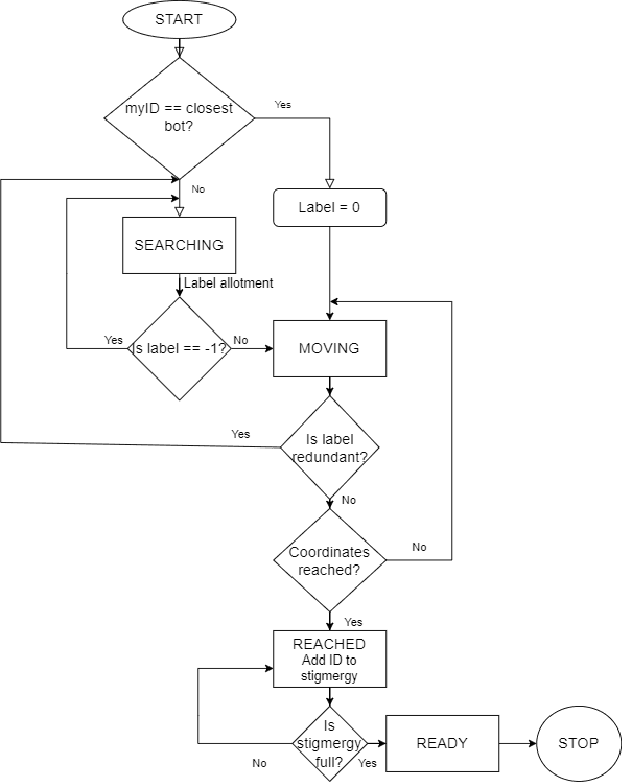
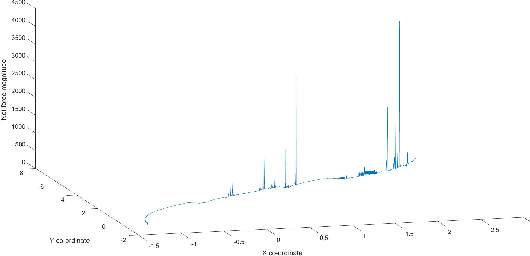
Swarm robotic systems utilize collective behaviour to achieve goals that might be too complex for a lone entity, but become attainable with localized communication and collective decision making. In this paper, a behaviour-based distributed approach to shape formation is proposed. Flocking into strategic formations is observed in migratory birds and fish to avoid predators and also for energy conservation. The formation is maintained throughout long periods without collapsing and is advantageous for communicating within the flock. Similar behaviour can be deployed in multi-agent systems to enhance coordination within the swarm. Existing methods for formation control are either dependent on the size and geometry of the formation or rely on maintaining the formation with a single reference in the swarm (the leader). These methods are not resilient to failure and involve a high degree of deformation upon obstacle encounter before the shape is recovered again. To improve the performance, artificial force-based interaction amongst the entities of the swarm to maintain shape integrity while encountering obstacles is elucidated.
CHARTOPOLIS: A Small-Scale Labor-art-ory for Research and Reflection on Autonomous Vehicles, Human-Robot Interaction, and Sociotechnical Imaginaries
Oct 01, 2022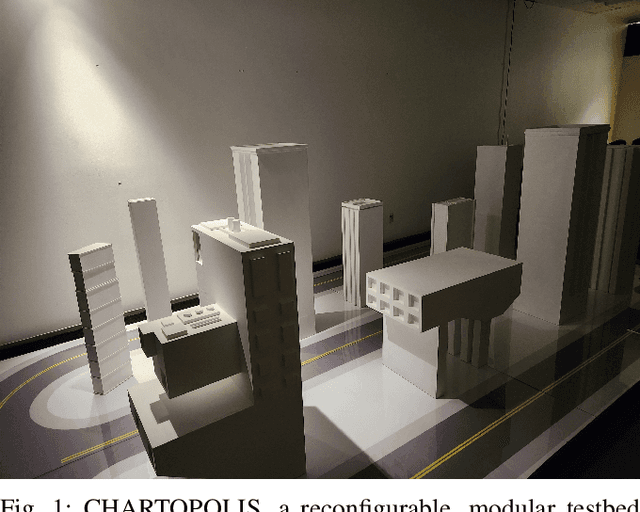
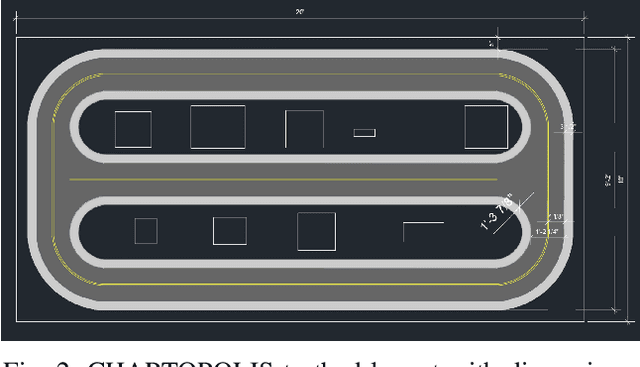
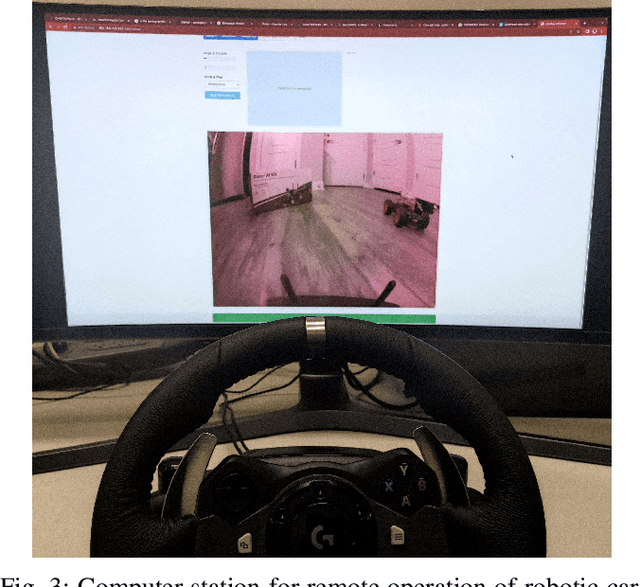
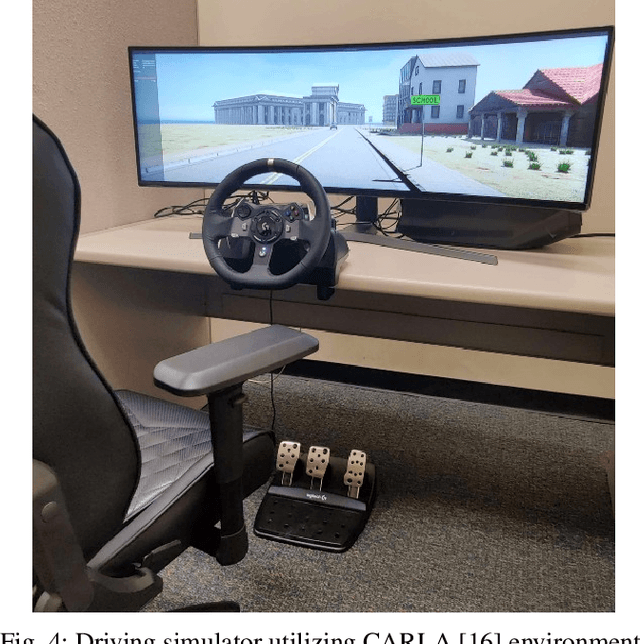
CHARTOPOLIS is a multi-faceted sociotechnical testbed meant to aid in building connections among engineers, psychologists, anthropologists, ethicists, and artists. Superficially, it is an urban autonomous-vehicle testbed that includes both a physical environment for small-scale robotic vehicles as well as a high-fidelity virtual replica that provides extra flexibility by way of computer simulation. However, both environments have been developed to allow for participatory simulation with human drivers as well. Each physical vehicle can be remotely operated by human drivers that have a driver-seat point of view that immerses them within the small-scale testbed, and those same drivers can also pilot high-fidelity models of those vehicles in a virtual replica of the environment. Juxtaposing human driving performance across these two contexts will help identify to what extent human driving behaviors are sensorimotor responses or involve psychological engagement with a system that has physical, not virtual, side effects and consequences. Furthermore, through collaboration with artists, we have designed the physical testbed to make tangible the reality that technological advancement causes the history of a city to fork into multiple, parallel timelines that take place within populations whose increasing isolation effectively creates multiple independent cities in one. Ultimately, CHARTOPOLIS is meant to challenge engineers to take a more holistic view when designing autonomous systems, while also enabling them to gather novel data that will assist them in making these systems more trustworthy.