 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmall-Scale Testbeds for Connected and Automated Vehicles and Robot Swarms: Challenges and a Roadmap
Mar 07, 2025This article proposes a roadmap to address the current challenges in small-scale testbeds for Connected and Automated Vehicles (CAVs) and robot swarms. The roadmap is a joint effort of participants in the workshop "1st Workshop on Small-Scale Testbeds for Connected and Automated Vehicles and Robot Swarms," held on June 2 at the IEEE Intelligent Vehicles Symposium (IV) 2024 in Jeju, South Korea. The roadmap contains three parts: 1) enhancing accessibility and diversity, especially for underrepresented communities, 2) sharing best practices for the development and maintenance of testbeds, and 3) connecting testbeds through an abstraction layer to support collaboration. The workshop features eight invited speakers, four contributed papers [1]-[4], and a presentation of a survey paper on testbeds [5]. The survey paper provides an online comparative table of more than 25 testbeds, available at https://bassamlab.github.io/testbeds-survey. The workshop's own website is available at https://cpm-remote.lrt.unibwmuenchen.de/iv24-workshop.
CHARTOPOLIS: A Small-Scale Labor-art-ory for Research and Reflection on Autonomous Vehicles, Human-Robot Interaction, and Sociotechnical Imaginaries
Oct 01, 2022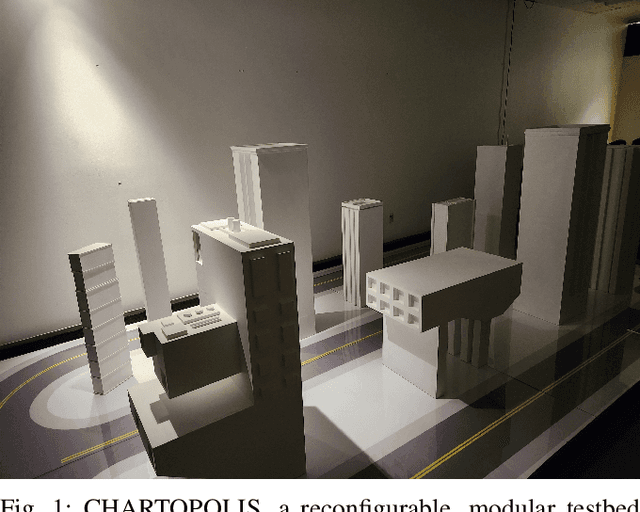
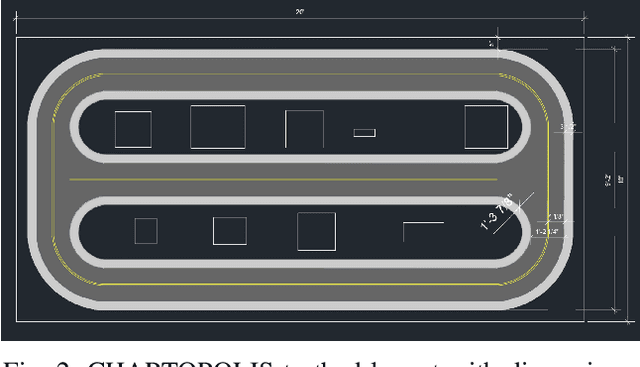
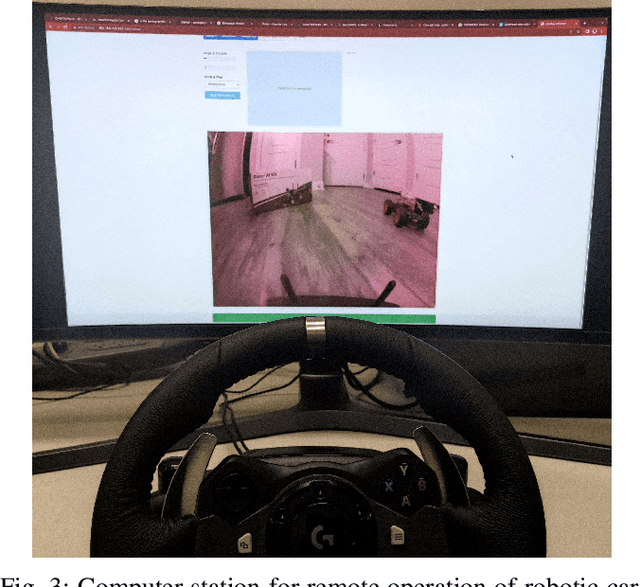
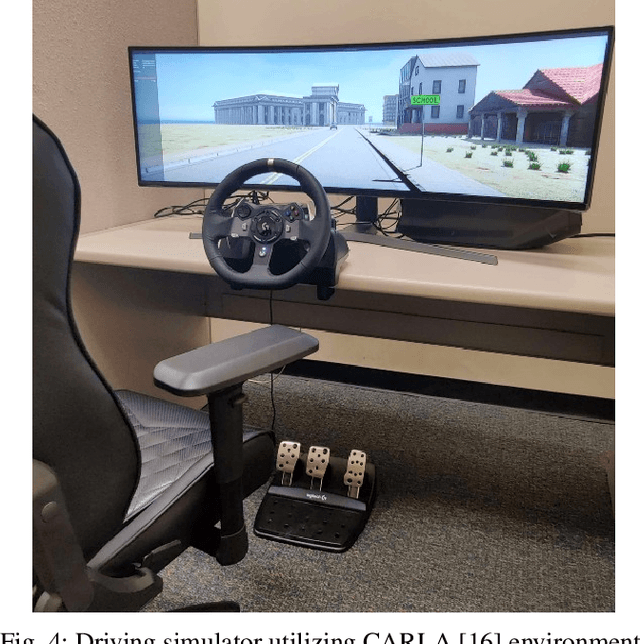
CHARTOPOLIS is a multi-faceted sociotechnical testbed meant to aid in building connections among engineers, psychologists, anthropologists, ethicists, and artists. Superficially, it is an urban autonomous-vehicle testbed that includes both a physical environment for small-scale robotic vehicles as well as a high-fidelity virtual replica that provides extra flexibility by way of computer simulation. However, both environments have been developed to allow for participatory simulation with human drivers as well. Each physical vehicle can be remotely operated by human drivers that have a driver-seat point of view that immerses them within the small-scale testbed, and those same drivers can also pilot high-fidelity models of those vehicles in a virtual replica of the environment. Juxtaposing human driving performance across these two contexts will help identify to what extent human driving behaviors are sensorimotor responses or involve psychological engagement with a system that has physical, not virtual, side effects and consequences. Furthermore, through collaboration with artists, we have designed the physical testbed to make tangible the reality that technological advancement causes the history of a city to fork into multiple, parallel timelines that take place within populations whose increasing isolation effectively creates multiple independent cities in one. Ultimately, CHARTOPOLIS is meant to challenge engineers to take a more holistic view when designing autonomous systems, while also enabling them to gather novel data that will assist them in making these systems more trustworthy.